改进灰狼算法在搬运机器人轨迹规划中的应用
2024-04-07张攀刘雨晗张威
张攀 , ,刘雨晗,张威 , ,
(1.中国民航大学 航空工程学院,天津 300300;2.民航航空公司人工智能重点实验室,广州 510470;3.中国民航大学 安全科学与工程学院,天津 300300;4.中国民航航空地面特种设备研究基地,天津 300300)
目前航空托运行李搬运完全依靠人工,存在效率低、暴力搬运等问题。部分机场正在开展机器人搬运、码垛行李方面的探索。由于托运行李表面材质、形状、尺寸各异,且存在易变形、易破损等特点,用于行李转运的机器人末端执行器不宜采用夹具类、吸盘类等执行器,而采用托盘式末端执行器。但托盘式执行器无法约束行李的所有自由度,所以需要额外注意运动中的冲击以避免掉落和相对运动。想要使得机器人能够平稳的接取行李和准确快速的放置行李,就需要对机器人进行合理的轨迹规划和优化。
不少国内外学者在机器人轨迹规划领域展开研究,目前机器人轨迹规划一般先采用插值算法对机器人运动路径进行插值,再采用合适的群智算法对其进行轨迹优化[1]。Kim 等[2]采用改进的粒子群算法对机械臂运动轨迹优化方法,避免了粒子群算法收敛在局部最优值。Xidias 等[3]通过结合多种群遗传算法,提出了一种冗余机械臂的时间最优轨迹规划方法,用以解决三维工作空间中机械臂由初始位形运动到最终位形运动的问题。Liu 等[4]通过改进的粒子群算法实现了4-3-3-4 次多项式插值的时间最优轨迹规划。Ma 等[5]针对机器人运行过程中加加速度突变的问题,提出了了一种同时考虑了转矩和加加速度的时间最优轨迹规划方法。米根锁等[6]提出了一种改进布谷鸟算法对空间机械臂进行轨迹优化,改善了关节轨迹的平滑性和机械臂运动的稳定性。在当前对机器人轨迹优化的研究中,鲜有针对机器人运行关节角加速度控制的研究,关节角加速度变化幅度过大,可能引起机器人末端执行器波动,影响机器人运行稳定性[7]。关节角加速度产生过大骤升或者骤降都可能增加机器人的驱动部件所受的冲击,降低其使用寿命[8]。因此针对降低机器人角加速度的轨迹优化十分具有研究价值。
灰狼优化算法(Grey wolf optimization, GWO)自出现起就以参数少、寻优快等优点在各领域得到了广泛运用[9],但GWO 算法容易出现早熟收敛和进化后期陷入局部最优值的问题。针对这些问题,国内外很多学者对GWO 算法做出了改进,Li 等[10]引入了Tent 映射优化灰狼初始种群,并引入高斯变异和余弦控制因子平衡算法局部搜索能力和全局搜索能力。Nadimi-Shahraki 等[11]提出了一种引入维度学习狩猎搜索策略的灰狼优化算法,缓解了GWO 算法容易过早收敛与种群结构单一的问题。Rodríguez 等[12]利用模糊逻辑策略对狼群的个体权重进行调整,将算法的全解空间寻优性能和局部解空间寻优性能进行了均衡优化。
本文结合混沌映射、差分进化算法和淘汰进化机制,提出一种新的改进灰狼算法(Improved grey wolf optimization, IGWO),并将该算法与标准灰狼算法、粒子群算法进行对比,经过4 个多峰基准函数和4 个单峰基准函数寻优测试后,证明该算法相较于两个对比算法,具有更优的稳定性、搜索精度和收敛速度。最后,将所提算法应用于机器人的加速度轨迹优化,实现了对机器人的关节角加速度最优的轨迹规划,提高了机器人运行稳定性。
1 改进灰狼算法
1.1 标准灰狼算法
GWO 算法将狼群中个体分为4 层:α狼,β狼,δ狼和ω狼。第一层为α狼,为狼群中的最高领导者,是当前的最优解;第二层为β狼,在狼群中地位仅次于α狼,是当前的次优解;第三层为δ狼,其地位次于α狼与β狼,也属于领导阶层,是当前的第三优解;第四层为ω狼,为狼群中除了前3 个层级的其他狼,为前3 阶层狼的备选解,若在之后的适应度更佳,则被选为前3 层级。狼群搜索、跟踪、靠近猎物,由α狼带领β狼和δ狼围攻猎物,若猎物逃脱,则由其他狼继续追捕,直至捕猎成功。灰狼捕猎过程中的位置更新公式如下:
式中:Xp(t)为第t次迭代时种群中α狼的位置;X(t)为第t代灰狼的位置向量;D为灰狼个体位置与α狼位置间的距离;C和A分别为摆动因子和收敛因子。
式中:r1和r2为随机值,取值范围在区间[0,1] 内,随着迭代次数的逐渐增加,收敛因子A的控制参数a线性减小,Tmax为最大迭代次数,amax=2,amin=0。
灰狼群体由狼α、β、δ带领狼群进行捕猎,更新种群位置,并通过A与C的不断变化,确保灰狼群体能够寻得全局最优解[13]。
1.2 改进的灰狼优化算法(IGWO)
与较早推出的群智算法,如粒子群算法(PSO)、差分进化算法(DE)等相比,GWO 算法具有更快的收敛速度和更强的鲁棒性,但另一方面还具有容易收敛于局部解空间最优解和收敛速度过快等缺点。因此,本文引入混沌映射、差分进化算法和淘汰进化机制,以得到一种性能更优的改进灰狼算法。
1.2.1 Logistic-Tent 映射
标准灰狼算法对种群的初始化无法保证初始解尽可能均匀分布于解空间,而采用混沌映射对种群进行初始化,相较于完全随机初始化种群,均匀性和遍历性更好,可以改善这个问题[14]。Logistic 映射具有良好的随机性和较强的全局遍历性,但存在后期搜索精度较弱的缺点,与之相较,Tent 映射则具有更优秀的均匀遍历性和更快的收敛速度[15-16],因此本文在迭代的初始阶段和后期精细搜索阶段分别执行两种混沌映射。为使首次初始化的灰狼群体分布更均匀,在首次初始化灰狼群体时采用Tent 映射,前期的粗搜索阶段采用Logistic 映射,增强算法全局寻优能力,后期则再次采用Tent 映射进行精细搜索,增加算法搜索精度:
式中:i为映射次数;zi为第k次映射函数值;T为当前迭代次数。
1.2.2 引入差分进化算法
差分进化算法的全局寻优性能较好,用DE/rand/1 变异策略对每次寻优迭代后的灰狼群体进行变异操作[17],对种群位置进行优化,即对于每一代t,随机选择3 个不同于当前个体i的个体Xr,并通过以下公式得到变异后的向量Vi,G+1为
式中:F为缩放因子,在[0, 2]之间取值[18],本文取值为0.6;r1、r2和r3是区间[1,N] 内任意不同整数,N为当前个体数量。
根据式(5)交叉操作,将灰狼种群中的变异个体与原始灰狼种群进行杂交,可得
式中:Cr为交叉概率;J为当前维度;Jrand为随机维度。
最后根据式(6)进行选择操作,通过贪婪算法的选择方式,对比父代X与子代U,只保留适应度更好的个体,可得
1.2.3 种群淘汰进化机制
每次迭代后,将适应度最差的R匹狼去除,同时通过Logistic-Tent 映射初始化新的R匹狼,即淘汰种群中距离猎物最远的部分狼,再产生新的狼,借此达到种群进化的效果[19]。本文中R取值为[n/2k,n/k]区间内的随机整数,k为种群淘汰比例因子,取值为6。
1.2.4 IGWO 算法步骤
IGWO 算法步骤如下:
步骤1 设置IGWO 算法基本参数,包括问题维度D,灰狼种群规模P,缩放因子F,种群淘汰比例因子R,交叉概率Cr,最大迭代次数Tmax。
步骤2 采用Tent 混沌映射将灰狼位置均匀初始化。
步骤3 求解目标函数,计算每只灰狼适应度,寻找最优的前3 个解,分别设置为灰狼α、β、δ。
步骤4 利用式(4)产生变异群体,再利用式(5)的交叉操作杂交得到新的灰狼群体,并对各代灰狼个体适应度进行统计,然后利用式(6)进行选择操作,选出更优个体组成新的种群。
步骤5 在新的种群中选出适应的最佳的3 只灰狼个体,设置为新的灰狼α、β、δ。
步骤6 淘汰适应度最差的R只灰狼,并通过Logistic-Tent 映射产生R只新的灰狼。
步骤7 转至步骤3 不断重复迭代循环;若T=Tmax,或所有个体均收敛,则终止循环,并输出最优位置和函数最优值。
1.3 基准函数算法对比验证
为验证IGWO 算法的寻优能力,将本算法与标准GWO 与PSO 算法进行仿真对比。
1)参数设置
选用GWO 算法和PSO 算法作为对比算法,对IGWO 算法的搜索能力、收敛速度和稳定性进行测试。实验设置的种群中个体数均为30,最大迭代次数设置为500,问题维度设置为30,表1 为IGWO和PSO 算法中的其他参数设置。
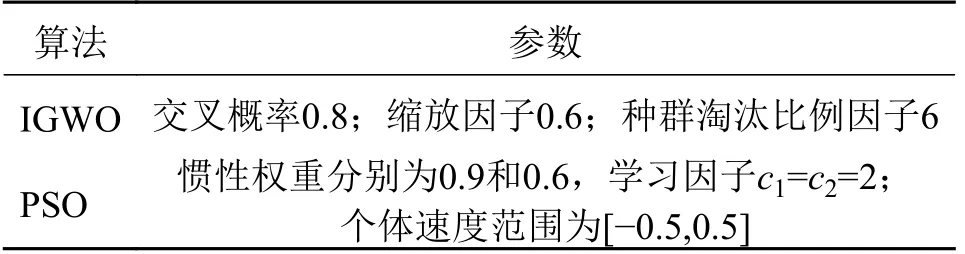
表1 各算法参数设置Tab.1 Parameter settings for each algorithm
2)基准函数选择
本文运用8 个不同类型的基准函数来验证改进灰狼优化算法的性能,前4 个选用单峰函数,用以评估算法的搜索精准度及收敛速度,后4 个选用多峰函数,用以评估算法的全局搜索性能。表2 为8 个基准函数。
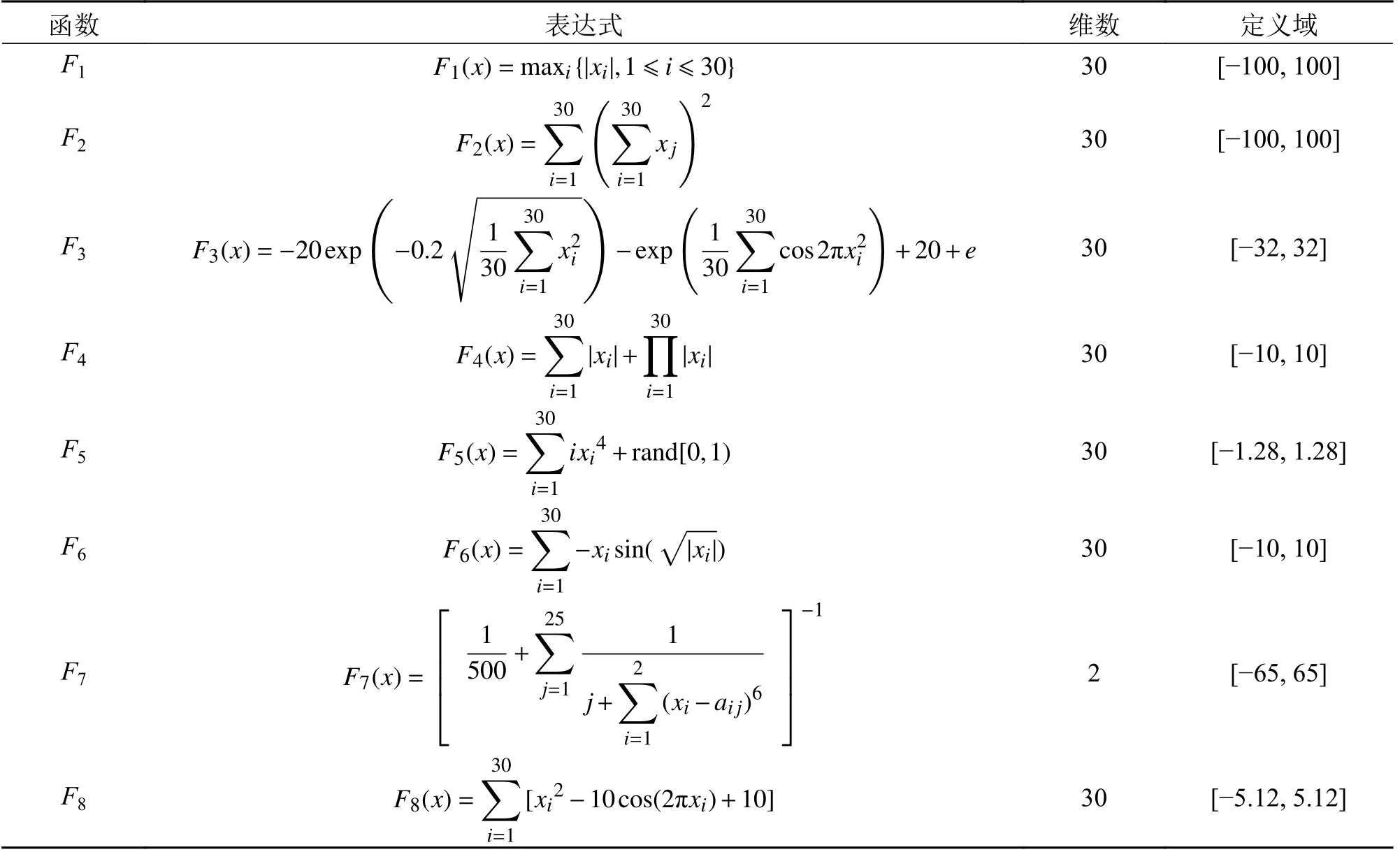
表2 各基准函数Tab.2 Each benchmark function
表3 为IGWO 算法与两个对比算法对上述8 个基准函数独立寻优计算30 次的统计结果。
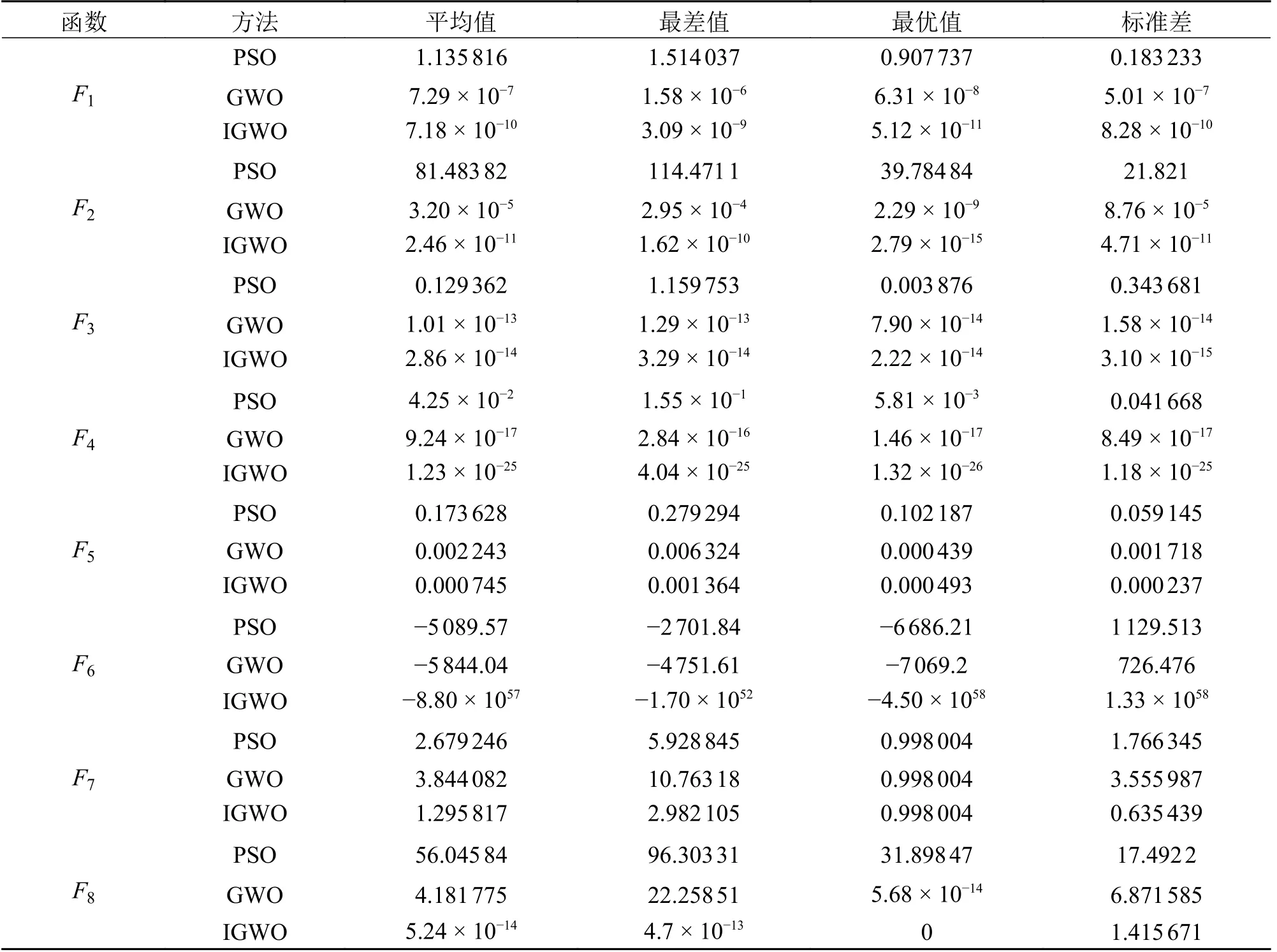
表3 基准测试函数寻优结果Tab.3 Benchmarking function optimization results
标准灰狼算法在进行最优值搜索时,仅关注于每个灰狼个体位置与种群中狼α、β、δ的位置信息,未将群体中所有灰狼个体间的信息进行联系[20],因此该算法没有较强的全局寻优性能。与之相较,差分进化算法具有较好的全局寻优性能,对灰狼个体之间进度交叉操作可以有效避免搜索最优值过程陷入局部最优解,依据差分进化算法思想,对灰狼个体位置进行优化,并通过引入Logistic-Tent 映射和淘汰进化机制对种群中灰狼种群结构进行优化。由表3 可知:本文所提出的IGWO 在函数寻优的最优结果优于PSO 和GWO。
算法的最优值迭代次数、最优值结果和收敛趋势是评估算法寻优能力的关键指标,三者可以在收敛曲线图中观察到,图1 为3 种算法分别对8 个基准函数执行最优解搜索的收敛曲线。由图1 可知:IGWO 算法相较于两个对比算法,通过较少的迭代次数搜索到了最优解。图1 中曲线拐点的更早出现意味着IGWO 算法具有更好的全局搜索能力,更容易跳出局部最优值,最终得到更优解。在F7和F8中,IGWO 算法分别在30 次、200 次左右寻得全局最优解。综合上述分析可知:IGWO 算法相较于GWO算法和PSO 算法,具有更快的收敛速度,更强的全局寻优性能,且解的质量更优。
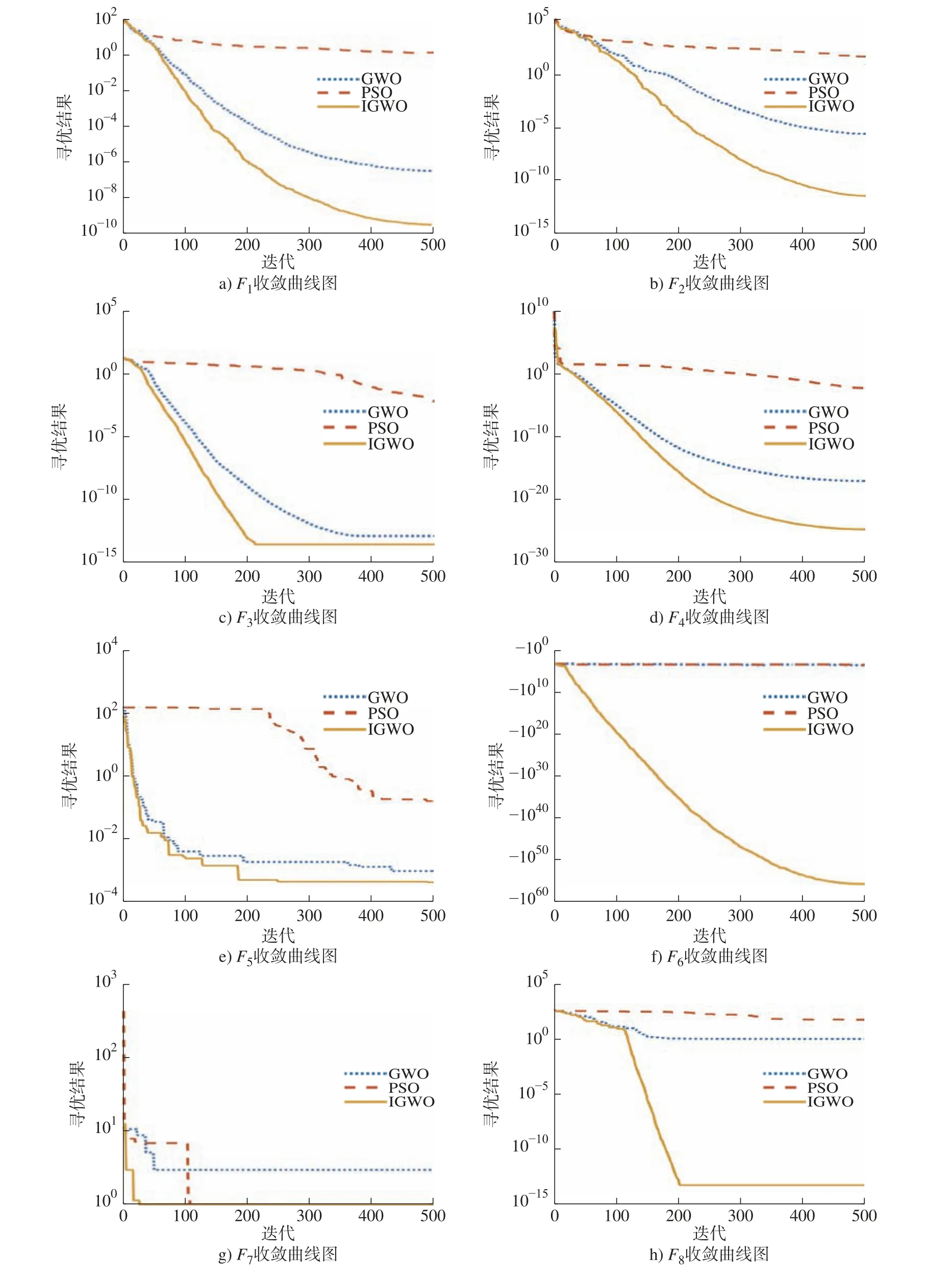
图1 PSO、GWO 和IGWO 算法求解8 种基准函数的收敛曲线图Fig.1 Convergence curves of PSO, GWO, and IGWO algorithms for solving 8 benchmark functions
2 IGWO 算法在搬运机器人轨迹规划中的应用
2.1 轨迹规划模型建立
文中所研究的是航空行李搬运机器人,该机器人为安装在横向地轨上的六自由度工业机器人,总共7 个自由度。机器人的末端执行器为装有传送带的托盘,用于接取和放置行李。执行码放工作时,传送带托盘保持水平,将行李运送至码放位置后,开启行李托盘上的传送带,将行李推入目标码放位置。由于托盘式执行器无法约束行李的所有自由度,所以需要格外注意运动中的冲击以避免掉落和相对运动。机器人搬运行李的运行路径如图2 所示。机器人末端执行器由A点运动至H点,其中A到C段为接取段,C到H段为码放段,机器人运动路径点信息如表4 所示。
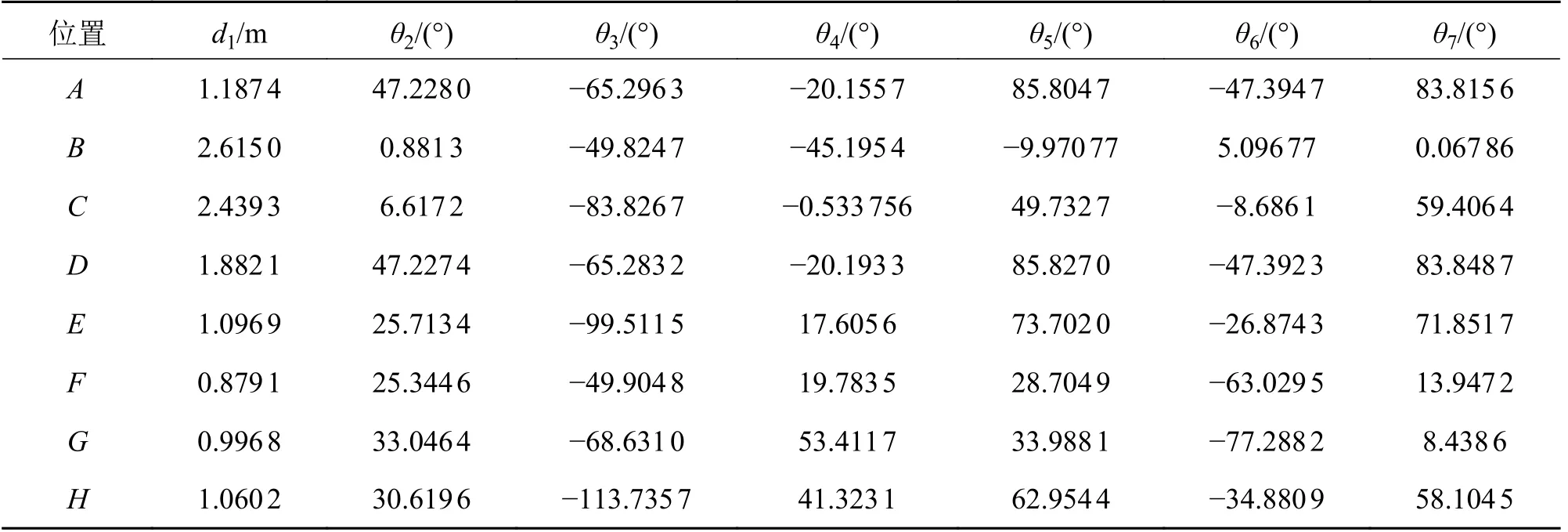
表4 路径点序列Tab.4 Path point sequence
采用七次多项式插值法进行运动轨迹规划。其中关节位置为
在t=0 时,初始关节角度、初始角速度、初始角加速度分别为:
第一中间点位置为
第二中间点位置为
则当t=tm时,目标关节角度、目标角速度、目标角加速度分别为:
由式(7) ~ 式(11)可得如下矩阵:
通过求解 [M]-1即可求得所有未知数c,从而得到机器人的运动轨迹方程。
2.2 运动轨迹仿真
设机器人在每个路径点间的运动间隔时间为1 s,利用MATLAB 仿真出机器人在执行搬运任务时各个关节的位置、角速度、角加速度,如图3 ~ 图5 所示。
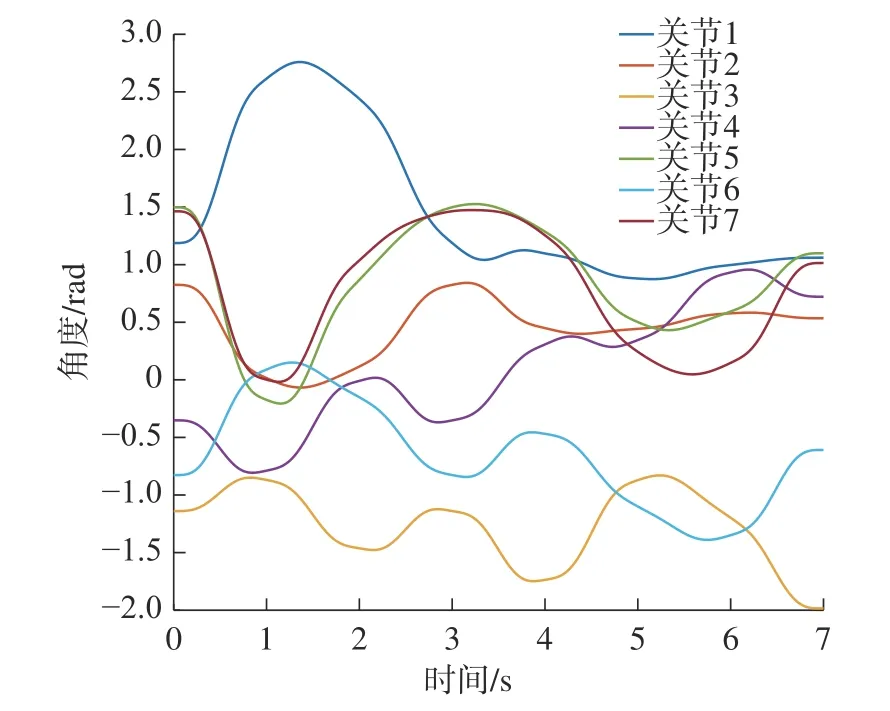
图3 机器人各关节角度Fig.3 Angles of robot joints
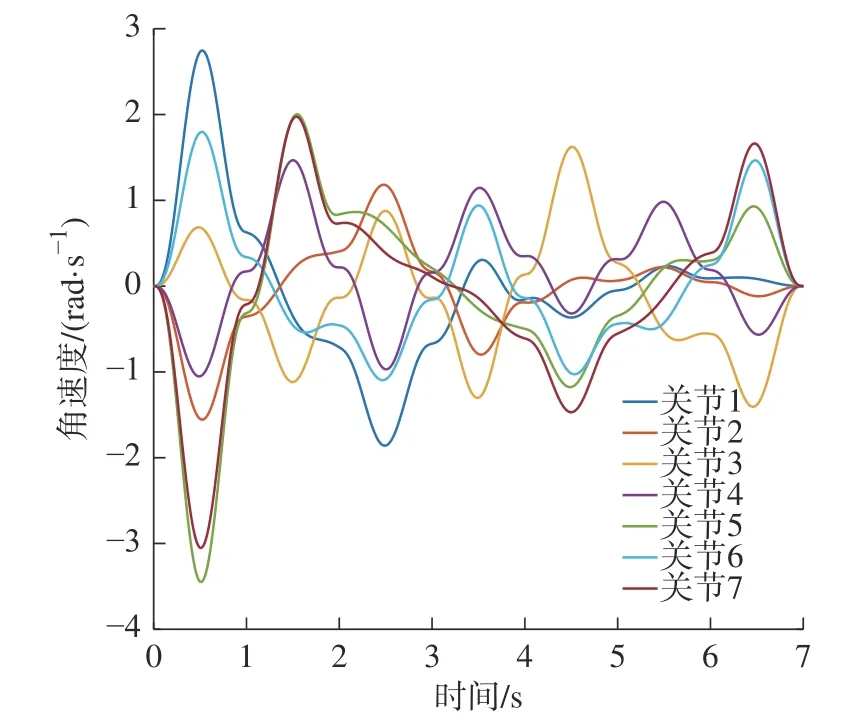
图4 机器人各关节角速度Fig.4 Angular velocity of robot joints
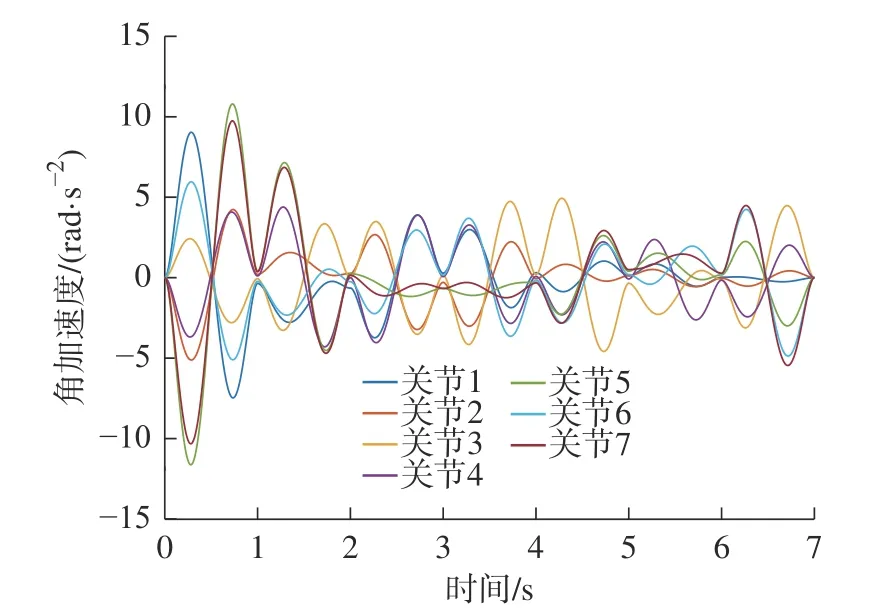
图5 机器人各关节角加速度Fig.5 Angular acceleration of robot joints
由图3 ~ 图5 可知:七次多项式插值法规划出的行李搬运路径关节角速度、角加速度曲线连续、平滑,没有突变的状况。
2.3 轨迹优化
采用IGWO 算法对机器人运动轨迹进行加速度优化,设置种群规模100,交叉概率0.8,缩放因子0.6,种群淘汰比例因子6,最大迭代次数500,优化的目标在于满足机器人运动约束条件且保持搬运节拍不变的情况下,要求机器人各关节的最大角加速度之和最小,定义目标函数为
式中:ti为第i个路径点与第i+ 1 个路径点间机器人运行的时间;ai为行李搬运周期内第i关节的角加速度。为避免在某一段的运动时间过长或过短,t设置于0.5 ~ 2 s 之间。
机器人在搬运行李时,运动节拍不变,1 个路径点周期的总时间设置为7 s。从实际搬运工况出发,机器人运动约束为:
式中:j为机器人关节序号;QCj、VCj、WCj、JCj分别为机器人第j关节位移、角速度、角加速度、角加加速度的额定最大值。
通过IGWO 算法对搬运机器人路径轨迹的加速度进行优化,图6 为优化后机器人各轴角加速度曲线。对比图5,优化后机器人的最大角加速度由10.79 m/s2下降为6.03 m/s2,下降幅度为44.11%。可见利用IGWO 算法求解能够得到较佳的轨迹优化方案,提高了搬运机器人运动过程中的稳定性。
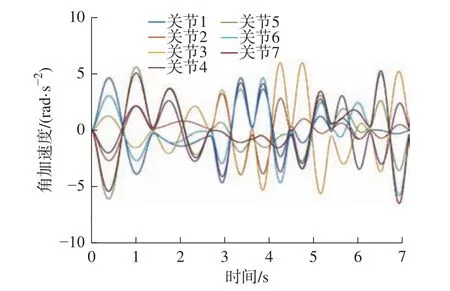
图6 优化后的关节角加速度曲线Fig.6 Optimized joint angular acceleration curve
3 结论
1) 针对GWO 算法存在的缺点,提出一种新的改进灰狼算法(IGWO),采用Logistic-Tent 混沌映射,均匀分布初始种群、改进算法收敛速度和寻优能力;引入差分优化算法,防止收敛过快、增强全局搜索能力;引入淘汰进化机制,优化种群结构,提升算法精度。
2) 经过对基准函数的寻优验证,IGWO 算法寻得最优解质量显著优于GWO 算法和PSO 算法,且具备更佳的全局最优值搜索能力和收敛速度。
3) 将IGWO 算法运用于搬运机器人轨迹规划中,优化结果理想。采用IGWO 算法进行轨迹优化后的机器人的最大角加速度值下降了44.11%,提高了机器人的运行稳定性,可有效避免行李搬运过程中的掉落和相对运动。
