基于端口频域特性的直驱风电机组控制器“黑/灰箱”辨识
2024-04-02王潇饶仪明吕敬吴林林任怡娜
王潇,饶仪明,吕敬,吴林林,任怡娜
(1. 国网冀北电力有限公司电力科学研究院(华北电力科学研究院有限责任公司),北京市 100045;2.电力传输与功率变换控制教育部重点实验室(上海交通大学),上海市 200240)
0 引 言
近年来,我国风电发展迅猛,装机容量世界第一,截至2021年底,全国风电累计装机容量达到3.28亿kW,风电已成为我国第二大装机电源[1-2]。然而,风电的大规模并网引发了一系列宽频振荡问题,严重危害了电力系统的安全稳定运行[3-5]。变流器是风电机组与电网的接口,对风电机组的动态特性起决定性影响,因此对其进行精确建模非常必要。然而,由于风电机组厂家商业保密,风电变流器的控制方式和参数往往不可知,即存在控制器的“黑/灰箱”问题[6-7]。
为建立“黑箱”研究对象的数学模型,现有的研究思路可以分为两类:一是根据研究对象的外特性建立其等效数学模型(如Wiener模型、离散状态空间模型等)[8-15];二是利用数据驱动方法(如人工神经网络)训练得到研究对象的外特性辨识模型(如宽频阻抗辨识模型)[16-18]。然而,上述方法仅能实现研究对象部分外特性的等效,无法获知研究对象的确切控制方式和参数,所获得模型能否用于大/小扰动等关键问题的研究存在疑问。
因此,有必要对风电变流器的控制方式和参数进行精确辨识,即实现“黑箱”模型的“灰箱”化以及“灰箱”模型的“白箱”化。现有文献主要关注“灰箱”模型控制参数的辨识,尚缺乏“黑箱”模型控制方式辨识方面的研究。
文献[19]基于风电机组的精确模型和可量测量,论证了风电机组参数的可辨识性;文献[20]则通过理论分析和实验进一步论证了数字PI控制器参数可唯一辨识。“灰箱”模型控制参数辨识本质上为非线性参数寻优问题,其基本思路为:1)通过理论推导建立“灰箱”模型的数学模型,即建立“灰箱”模型特征量的数学表达式,表达式中包含未知的控制参数;2)测量“灰箱”模型的实际特征量;3)利用参数寻优算法,使所建立“灰箱”模型特征量的数学表达式计算结果充分逼近相应的测量结果,从而辨识得到控制参数。
根据参数寻优所利用的特征量,可以将现有的控制器参数辨识方法分为时域方法[21-26]和频域方法[27-31]。时域方法通过对风电机组施加持续激励(如在外环参考值上叠加阶跃扰动[21-22]、在交流侧制造三相短路故障[22-24]或电压跌落[23]、在量测信号叠加三相M序列[25]等),测量风机系统时域特征量(如dq轴电流[21-23]、直流电压[23]、无功功率[24,26]等)的响应数据,进而通过控制参数寻优,使时域特征量的数学表达式计算结果充分逼近相应的量测数据,最终得到控制参数的辨识值。时域方法的实施需对风电机组施加持续激励,如果采用制造故障的方式则会影响风电机组的正常运行,而在控制器参考值上叠加扰动信号的方式对于大部分厂家生产的设备难以实施,因此其在工程实际中的应用受到限制。频域方法通过测量风机系统的频域特征量(如控制器等效传递函数[27-28]、小信号阻抗[29-31]等),进而通过参数寻优,使频域特征量的数学表达式计算结果充分逼近相应的量测数据,最终得到控制参数的辨识值。其中,文献[27]和[28]分别针对双馈风电机组转子侧控制器和网侧控制器,在控制器参考信号上叠加伪随机信号,通过伪随机信号的自功率谱及其与dq轴电流响应的互功率谱计算控制器传递函数的频率序列,进而通过传递函数拟合辨识得到控制器参数。然而,其实用性也因大部分厂家生产的设备不支持控制量参考值更改而受到限制。此外,上述文献均忽略了锁相环,无法实现对锁相环参数的辨识,且需通过分步的方法进行多次辨识才能获得内外环控制器参数。文献[29]基于序阻抗的实部和虚部进行并网逆变器控制参数的辨识,但忽略了无功功率外环。文献[30]和[31]分别测量风电机组和光伏并网逆变器的dq域小信号阻抗,通过控制器参数寻优使理论阻抗模型逼近阻抗测量值,以实现控制器参数的辨识,然而文献[30]并未给出具体的参数寻优方法,文献[31]中Vector Fitting算法的复杂求解过程限制了其在实际工程中的应用。
在参数寻优算法方面,现有研究主要基于粒子群优化算法[24,29]、差分进化算法[32-33]、正余弦优化算法[25]、长短期记忆神经网络[23]、线性神经网络[26]和Levenberg-Marquardt算法(阻尼最小二乘法)[21-22,27-28,31]。其中,粒子群优化算法、差分进化算法和正余弦优化算法的参数寻优结果受初始值的影响较大,容易陷入局部最优,且收敛耗时较长,神经网络类方法在应用之前需进行复杂的样本准备和神经网络训练,且训练结果与神经网络的初始状态密切相关,参数辨识精度得不到保障。此外,人工智能类方法不可避免地存在可解释性差的问题。阻尼最小二乘法是一种应用成熟的非线性参数寻优算法,收敛速度较快,其寻优精度不受初始点与真值距离的影响,具有较好的寻找最优参数的能力[27],能够保证较高的控制参数辨识精度。
综上所述,现有研究尚未涉及“黑箱”模型的“灰箱”化,且将“灰箱”向“白箱”转变的控制参数辨识方法存在实际工程应用困难、难以一次性准确辨识出不同环节控制器参数、无法获得锁相环参数、求解过程复杂等问题。为此,本文针对直驱风电机组控制器的“黑/灰箱”问题进行研究,建立含不同带宽控制环节的直驱风电机组的精细化宽频阻抗模型,通过提取不同控制方式下交直流端口的阻抗特征,基于阻抗特征匹配辨识机、网侧变流器的控制方式,实现直驱风电机组“黑箱”模型的“灰箱”化,进而利用阻尼最小二乘算法使端口实测阻抗与理论阻抗在各个频率点处差值的平方和最小,一次性准确辨识出包括锁相环在内的不同带宽控制环节的控制参数,实现直驱风电机组“灰箱”模型的“白箱”化。
1 不同控制方式下直驱风电机组的阻抗模型
1.1 直驱风电机组的主电路及控制方式
图1所示为永磁直驱风电机组主电路结构及其典型控制方式。永磁直驱风电机组的主电路主要包括风力机、永磁同步发电机、机侧变流器、直流母线、直流电容、网侧变流器及其交流侧滤波器。永磁直驱风电机组机、网侧变流器的典型控制方式为双闭环矢量控制,机侧变流器外环控转速或转矩、内环控交流电流,网侧变流器外环控直流电压及无功功率或交流电压、内环控交流电流。对直驱风电机组主电路及控制方式的详细描述见附录A。

图1 永磁直驱风电机组主电路结构及典型控制方式
1.2 不同控制方式下直驱风电机组的阻抗模型
本节将利用直驱风电机组的模块化、多端口模型[34]以及其通用的阻抗建模方法[35],建立不同控制方式下直驱风电机组的阻抗模型。由于篇幅限制,正文中仅给出关键控制方程和关键参数矩阵的推导结果,直驱风电机组的模块化、多端口模型以及其通用的阻抗建模方法详见附录A。
1)机侧变流器直流端口阻抗建模。
(a)机侧变流器采用转矩控制。
当机侧变流器采用转矩控制时,机侧变流器的外环和内环控制方程可以分别表示为:
(1)
(2)
式中:id2、iq2和id2ref、iq2ref分别为机侧变流器交流侧电流及其参考值的d、q轴分量;ud2、uq2分别为机侧变流器交流侧电压的d、q轴分量;Te、Teref分别为转矩及其参考值;Hmc为机侧电流内环PI控制器;HT为转矩外环PI控制器;udc、udc0分别为直流电压的测量值和额定值。
对式(1)和式(2)进行小信号线性化,可以得到附录式(A2)前两行的详细表达式,也即Ydq2、a可被推导得到,如式(3)所示。
(3)
式中:np、φ分别为永磁同步电机的极对数和磁链。
将式(3)代入附录式(A7)即可得到直驱风电机组机侧变流器在外环转矩控制下的直流端口阻抗。
(b)机侧变流器采用转速控制。
当机侧变流器采用转速控制时,内环控制方程与式(2)一致,外环控制方程可以表示为:
(4)
式中:Hω为转速外环PI控制器;ωm、ωmref分别为转速及其参考值。
对式(4)进行小信号线性化,整理得到附录式(A2)前两行的详细表达式,则转速控制下的Ydq2、a可被推导得到,如式(5)所示。
(5)
式中:J为永磁同步发电机的转动惯量。
将式(5)代入附录式(A7)即可得到直驱风电机组机侧变流器在外环转速控制下的直流端口阻抗。
2)网侧变流器交流端口阻抗建模。
(a)网侧变流器采用直流电压/无功功率控制。
当网侧变流器采用直流电压/无功功率控制时,外环和内环控制方程可以分别表示为:
(6)
(7)
式中:HQ为无功功率外环PI控制器;Hdc为直流电压外环PI控制器;Hc为网侧电流内环PI控制器;id4、iq4和id4ref、iq4ref分别为网侧变流器交流侧电流及其参考值的d、q轴分量;udcref为直流母线电压的参考值;Q、Qref分别为永磁直驱风电机组输出无功功率的实际值、参考值;变量的下标c表示相应变量为控制系统坐标系下的变量。
对式(6)和式(7)进行小信号线性化,并考虑锁相环、交流侧滤波器动态,可以得到:
(8)
式中:矩阵A、B及C详见附录A式(A15)—(A17)。
将式(8)代入附录式(A9)即可得到直驱风电机组网侧变流器在直流电压/无功功率控制下的交流端口阻抗。
(b)网侧变流器采用直流电压/交流电压控制。
网侧变流器采用直流电压/交流电压控制时,内环控制方程与式(7)一致,外环控制方程可以表示为:
(9)
式中:Hac为交流电压外环PI控制器;uac、uacref分别为永磁直驱电机组交流侧电压幅值的实际值和参考值。
对式(9)和式(7)进行小信号线性化,并考虑锁相环、交流侧滤波器动态,可以得到:
(10)
式中:矩阵E及F详见附录A式(A21)—(A22)。
将式(10)代入附录式(A9)即可得到直驱风电机组网侧变流器在直流电压/交流电压控制下的交流端口阻抗。
1.3 直驱风电机组阻抗模型验证
为验证所建立机侧变流器直流端口阻抗模型和网侧变流器交流端口阻抗模型的准确性,基于Matlab/Simulink搭建永磁直驱风电机组的时域仿真模型,主电路参数和控制参数详见附录表A1。
分别在机侧变流器的2种控制方式下测量机侧变流器的直流端口阻抗,即:在机侧变流器直流端口依次注入频率范围在1~1 000 Hz内的扰动电压信号,通过测量电流信号的响应,可计算得到对应频率下的机侧变流器直流端口小信号阻抗。类似地,分别在2种控制方式下测量网侧变流器交流端口正序阻抗。
图2(a)展示了永磁直驱风电机组在机侧变流器外环转矩控制和转速控制下直流端口阻抗理论计算值与扫频测量值的对比结果,图2(b)展示了永磁直驱风电机组网侧变流器在直流电压/无功功率(Udc/Q)控制和直流电压/交流电压(Udc/Uac)控制下交流端口正序阻抗理论计算值与扫频测量值的对比结果。可以看到,在各典型控制方式下,机侧变流器直流端口阻抗和网侧变流器交流端口正序阻抗的理论计算值与相应的扫频测量值具有很好的一致性,从而验证了本文所建立永磁直驱风电机组阻抗模型的准确性。
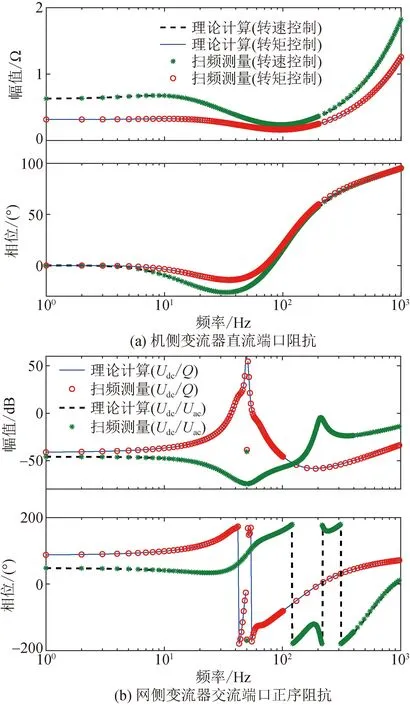
图2 直驱风电机组阻抗模型扫频验证结果
2 基于端口测量阻抗的直驱风电机组控制器“黑/灰箱”辨识
2.1 参数灵敏度及参数可辨识性研究
由上文所建立的阻抗模型可知,直流侧阻抗和交流侧阻抗都是变流器控制器参数的函数,因此可以通过实测端口阻抗数据辨识控制器的控制方式和控制参数。
参数辨识的可行性可以通过计算各参数在阻抗表达式中的灵敏度来确认,灵敏度越大则可辨识性越高,灵敏度小则不易辨识。某控制器参数θ的幅值灵敏度SM和相位灵敏度SP定义为:
(11)
式中:Δθ表示待辨识参数θ的偏差量。
根据参数灵敏度的定义,可以计算出各参数在各个频率点处的灵敏度。本文正文部分仅给出机侧变流器在2种控制方式下各参数的灵敏度,如图3所示,网侧变流器各参数的灵敏度详见附录B。由图3 (a)—3(d)可见,机侧变流器控制器参数在直流端口阻抗中的灵敏度均存在某一个频段远大于0,因此可以通过机侧变流器直流端口测量阻抗辨识机侧变流器各控制器参数。同理,通过网侧变流器交流端口测量阻抗可以辨识网侧变流器各控制器参数。基于此,本文采用分步辨识的策略,先通过直流端口阻抗辨识机侧变流器控制器参数,再通过交流端口正序阻抗辨识网侧变流器控制器参数。
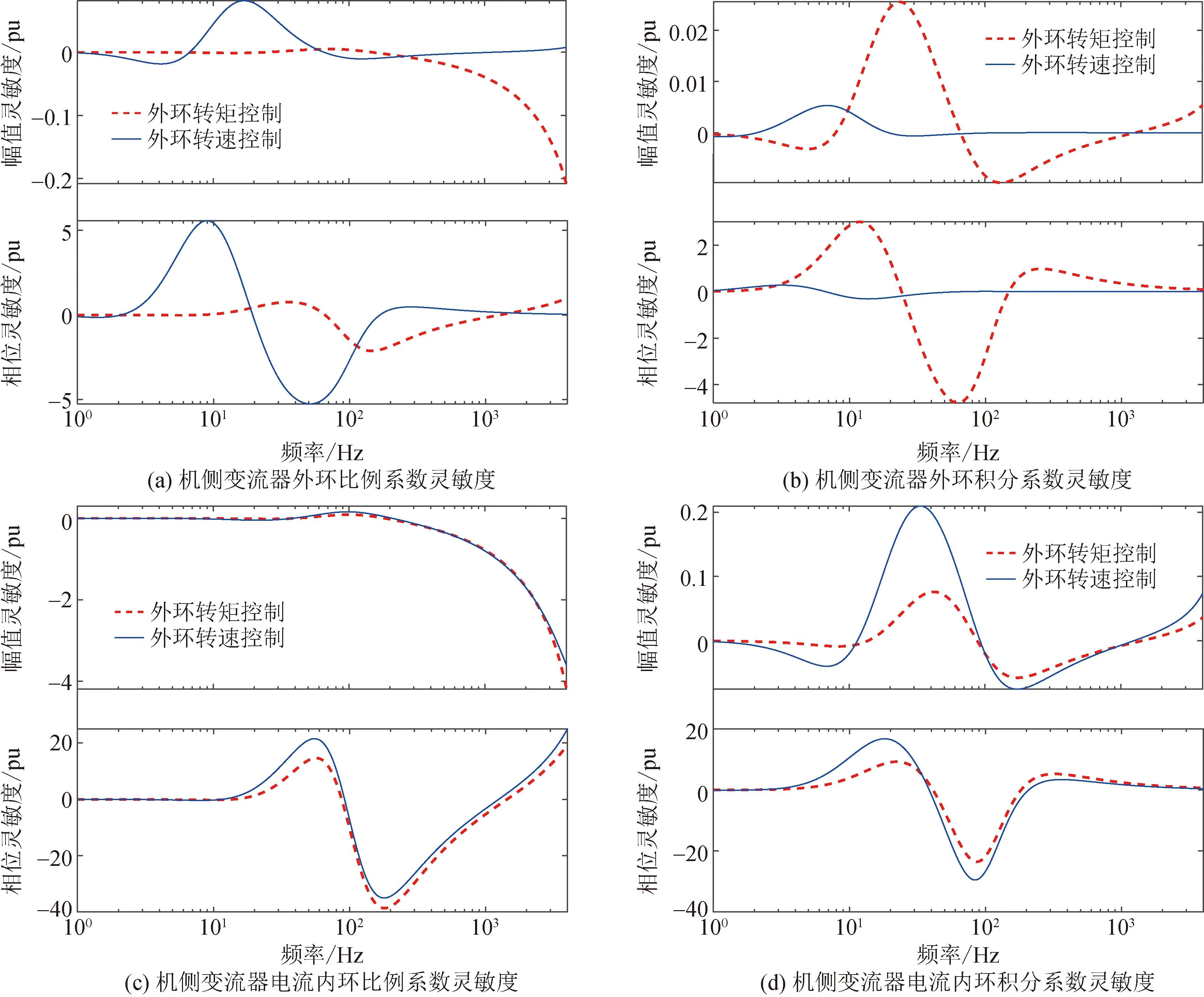
图3 机侧变流器控制参数灵敏度
2.2 “黑箱”模型控制方式辨识
直驱风电机组“黑箱”模型控制方式辨识的主要思路是提取变流器在不同控制方式下的频域阻抗特征,进而基于频域阻抗特征匹配实现控制方式的辨识。
1)机侧变流器控制方式辨识。
由图2 (a)可知,机侧变流器在转矩控制和转速控制下直流端口阻抗曲线总体趋势相同,无明显差异,仅仅通过直流端口实测阻抗无法有效地辨识机侧变流器控制方式。然而,由图3 (a)可以清楚地看到,转矩控制和转速控制下,外环比例系数的参数灵敏度存在较大差异,即:在低频处,转速控制的外环比例系数灵敏度较大,而转矩控制的外环比例系数灵敏度趋于0;在高频处,转速控制的外环比例系数灵敏度趋于0,而转矩控制的外环比例系数灵敏度较大。因此,可以比较外环比例系数在不同频段下的灵敏度差异,实现机侧变流器控制方式的辨识。
2)网侧变流器控制方式辨识。
由图2 (b)可以看到,网侧变流器不同的控制方式下,其交流端口阻抗存在明显差异,表现为:在直流电压/无功功率控制下,交流端口阻抗幅频特性在基频50 Hz处存在明显的谐振峰,而直流电压/交流电压控制下阻抗幅频特性无此谐振峰。基于这一显著差异,可以实现网侧变流器控制方式的辨识。
3)直驱风电机控制方式辨识流程。
基于上述分析,可以归纳得到直驱风电机组“黑箱”模型控制方式辨识的流程如图4所示,基于此辨识流程,即可将直驱风电机组的“黑箱”模型转变为控制方式已知的“灰箱”模型。

图4 直驱风电机组控制方式辨识流程
2.3 “灰箱”模型控制参数辨识
由于直驱风电机组直流端口阻抗和交流端口阻抗分别是机侧变流器控制器参数和网侧变流器控制器参数的函数,因此,可以基于频域阻抗一致性,通过非线性最小二乘算法,使理论阻抗模型(含未知的控制器参数)逼近相应的实测阻抗数据,实现控制器参数的辨识。
1)辨识算法——非线性最小二乘算法。
由于风电机组的端口阻抗是控制器参数的非线性函数,因此控制器参数辨识问题也即求解式(12)所示的优化问题:
(12)
式中:f表示各频率点;Zmeasure表示端口实测阻抗;Ztheo表示端口理论阻抗;min表示求最小值。
非线性最小二乘算法是求解式(12)所示优化问题的有效方法,其中Levenberg Marquardt迭代算法具有收敛速度快、拟合精度高等优点,是本文参数辨识所采用的具体实施算法。
2)机侧变流器控制器参数辨识流程。
步骤1:根据直驱风电机组机侧变流器控制器的典型参数,给定机侧变流器外环和电流内环的比例积分系数初始值Kp_out、Ki_out、Kp_mc、Ki_mc;
步骤2:在系统电气参数已知的情况下,代入控制器参数初始值,可求得直驱风电机组直流端口阻抗Zdc_theo(f);
步骤3:设置损失函数如下:
(13)
步骤4:根据实测的直流端口阻抗数据Zdc_measure(f),计算损失函数Qm的值,利用Levenberg Marquardt迭代算法不断更新Zdc_theo(f)中的控制器参数Kp_out、Ki_out、Kp_mc、Ki_mc,直至损失函数Qm小于预设目标ζ,此时所得Kp_out、Ki_out、Kp_mc、Ki_mc即为机侧变流器控制器参数的最终辨识值。
3)网侧变流器控制器参数辨识流程。
步骤1:将辨识得到的机侧变流器控制器参数代入直驱风电机组交流端口阻抗模型;
步骤2:根据直驱风电机组网侧变流器控制器的典型参数,给定网侧变流器外环、电流内环和锁相环的比例积分系数初始值Kp_dc、Ki_dc、Kp_q,out、Ki_q,out、Kp_c、Ki_c、Kp_PLL、Ki_PLL;
步骤3:在系统电气参数已知的情况下,代入网侧变流器控制器参数初始值,可求得直驱风电机组交流侧正序阻抗Zp_theo(f);
步骤4:设置损失函数:
(14)
步骤5:根据实测的交流侧正序阻抗数据Zp_measure(f),计算损失函数Qg的值,利用Levenberg Marquardt迭代算法不断更新Zp_theo(f)中的控制器参数Kp_dc、Ki_dc、Kp_q,out、Ki_q,out、Kp_c、Ki_c、Kp_PLL、Ki_PLL,直至损失函数Qg小于预设目标ζ,此时所得Kp_dc、Ki_dc、Kp_q,out、Ki_q,out、Kp_c、Ki_c、Kp_PLL、Ki_PLL即为网侧变流器控制器参数的最终辨识值。
4)直驱风电机组控制器参数辨识流程。
将直驱风电机组控制器参数辨识步骤以流程图形式绘制,如图5所示。基于此辨识流程,即可将直驱风电机组的“灰箱”模型转变为控制方式和控制参数均已知的“白箱”模型。
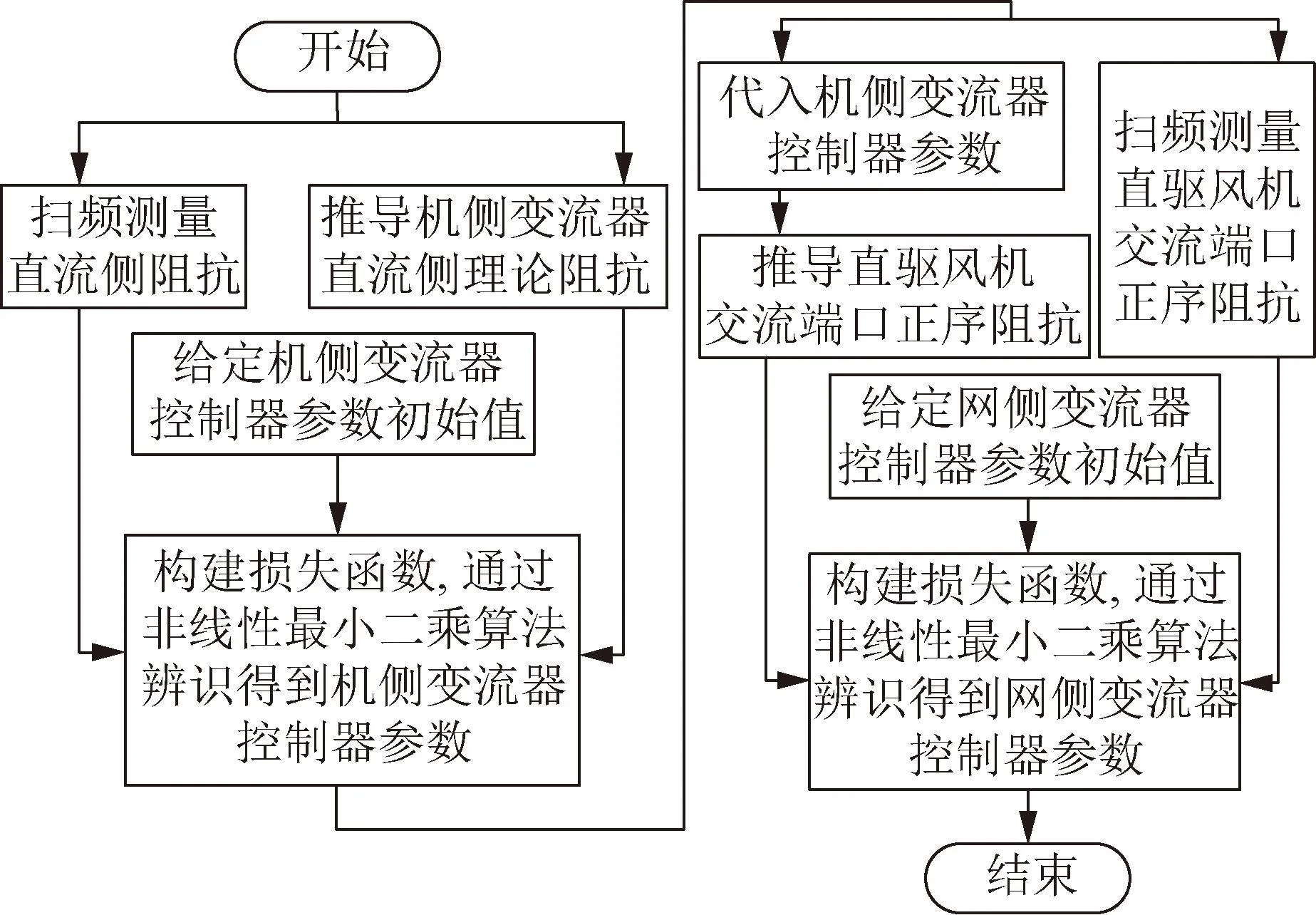
图5 直驱风电机组控制器参数辨识流程
3 算例分析
本节以一永磁直驱风电机组的“黑/灰箱”辨识为例说明本文所提方法的有效性。
本案例交流电网电压为690 V/50 Hz,永磁直驱风电机组的额定功率为2 MW,额定转速为2 rad/s,机侧变流器采用转矩控制方式,网侧变流器采用直流电压/无功功率控制方式。机侧变流器控制系统转矩给定值为-8×105N·m,网侧变流器控制系统直流电压给定值为1 120 V,网侧变流器向电网输出的无功功率控制为0.8 MW。
首先微调机侧变流器外环比例系数并计算灵敏度,发现在高频处灵敏度较大,则可确定机侧变流器采用转矩控制。根据交流端口测量得到的正序阻抗,可以检测到正序阻抗的幅频曲线在50 Hz处存在谐振峰,故可确定网侧变流器采用直流电压/无功功率控制,实现了永磁直驱风电机组“黑箱”模型向“灰箱”模型的转变。
在确定了机、网侧变流器控制方式的基础上,基于所建立的永磁直驱风电机组直流端口、交流端口阻抗模型,可利用图5所示的控制器参数辨识方法进一步将此“灰箱”模型转变为“白箱”。表1给出了机侧变流器控制器参数的辨识结果,可以看到辨识精度较高:电流内环控制器参数的辨识误差在1%以内;外环参数辨识值的相对误差较大,其主要原因为外环控制器参数本身数量级较小,导致了较大的相对误差。

表1 机侧变流器控制器参数辨识结果
表2给出了网侧变流器控制器参数的辨识结果,可以看到最大误差不超过5%,验证了辨识方法的准确性。
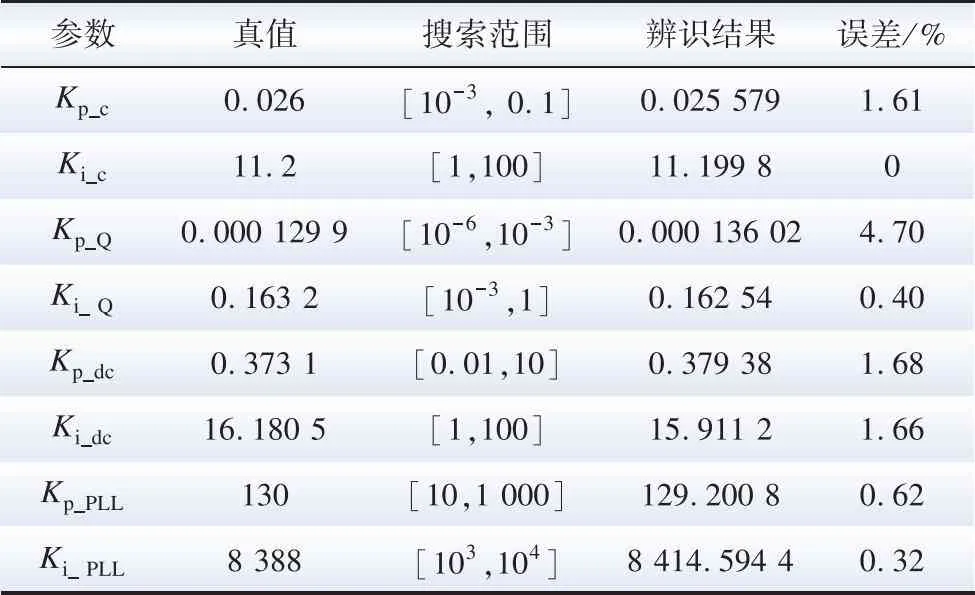
表2 网侧变流器控制器参数辨识结果
4 结 论
为应对直驱风电机组变流器控制器存在的“黑/灰箱”问题,本文提出了基于端口测量阻抗的永磁直驱风电机组“黑/灰箱”辨识方法。通过提取不同控制方式下机侧变流器直流端口和网侧变流器交流端口的阻抗特征,利用端口阻抗特征匹配实现了机、网侧变流器“黑箱”控制方式的辨识;进一步地,利用理论阻抗与测量阻抗的一致性,实现了永磁直驱风电机组机、网侧变流器“灰箱”控制参数的辨识。本文所提方法所利用特征量(端口宽频阻抗)物理意义明确、便于获取,无需改动风机控制,可一次性准确辨识含锁相环在内的所有不同带宽控制环节的控制参数,特别适用于含多带宽控制环节的电力电子设备,具有实用性强、辨识精度高、辨识过程简单高效等优点。
后续工作将进一步丰富阻抗模型特征库,将更多在实际工程中可能得到应用的控制方式(如传统矢量控制+附加控制、构网型控制等)纳入研究范围,以丰富的阻抗特征库实现实际工程中各种风电变流器控制方式和控制参数的辨识。
