驱动系统效率最优的并联混合动力商用车模式切换及换挡控制策略
2024-03-31严正峰蒋光宗姚明尧
严正峰 蒋光宗 姚明尧

摘要 :为提高搭载自动变速器的并联混合动力商用车燃油经济性,以驱动系统效率最优为目标,提出一种新的驱动模式边界划分和挡位边界划分方法。制定了基于效率最优的模式切换及换挡控制策略,并在中国重型商用车行驶工况下对所制定的控制策略进行了仿真验证。结果表明,所提出的策略不仅能够维持电池荷电状态的平衡,且百公里油耗比电辅助控制策略低11.2%,具有更好的燃油经济性。
关键词 :能量管理策略;边界划分方法;模式切换;换挡规律;混合动力商用车
中图分类号 :U462.3
DOI:10.3969/j.issn.1004-132X.2024.02.020
开放科学(资源服务)标识码(OSID):
Mode Transition and Gear Shifting Control Strategy for Parallel Hybrid
Commercial Vehicles Based on Optimal Drive System Efficiency
YAN Zhengfeng JIANG Guangzong YAO Mingyao
School of Automotive and Transportation Engineering,Hefei University of Technology, Hefei,230009
Abstract : To enhance the fuel economy of parallel hybrid commercial vehicles equipped with automatic transmissions and optimize the efficiency of the drive system, a new method for dividing driving mode boundaries and gear boundaries was proposed. A control strategy for mode switching and gear shifting was developed based on optimal efficiency and simulated under the driving conditions of Chinese heavy commercial vehicles. The results demonstrate that the proposed strategy maintains the balance of the battery state of charge, and achieves a 11.2% reduction in fuel consumption per 100 kilometers compared to the electric assist control strategy, which improves the fuel economy.
Key words : energy management strategy; boundary division method; model transition; gear shifting law; hybrid commercial vehicle
0 引言
混合动力汽车比传统燃油车的油耗更低,且没有续航里程焦虑,兼有传统燃油车和纯电动汽车的优点。根据控制方法,混合动力汽车的能量管理策略可分为三种类型:基于规则 [1-2] 、基于优化 [3-5] 、基于学习 [6-8] 。基于优化的能量管理策略计算量大,对控制模型的精度要求较高,难以满足实时应用的需求。基于学习的能量管理策略面临“维度灾难”和“离散误差”等问题,限制了强化学习在解决复杂决策问题时的应用。基于规则的能量管理策略虽然很难保证混合动力汽车拥有最优的燃油经济性,但控制方法简单且有较好的实时性,是目前实车应用最成熟的控制方法 [9] 。
设计基于确定性规则的能量管理策略时,关键是如何合理地划分模式切换边界和换挡规律。在模式边界划分的研究中,文献[10]基于对规则式能量分配策略和瞬时优化分配策略的分析,提出一种基于规则修正的瞬时优化能量分配算法。文献[11]提出的启发式控制策略可以根据电机的功率实时调整车辆的驱动模式。在换挡规律的研究中,文献[12]提出一种分段交叉式的換挡规律设计方法,即在不同的工况下,选择合适的换挡规律的交叉式设计方法。文献[13]考虑双动力源协同和电池荷电状态的影响,提出改进双参数换挡规律计算原则和方法。
混合动力汽车的实际行驶过程中,车辆的行驶工况会发生变化,车辆也需要不断切换驱动模式和挡位来满足整车的动力性和经济性需求,因此需要统筹考虑模式切换和换挡问题。针对模式切换和换挡规律的研究中,文献[14]利用某款搭载双离合自动变速器(DCT)的混合动力乘用车,设计了汽车模式切换与DCT换挡的综合工作规律。文献[15]通过计算瞬时输出功率下各动力源的等效燃油消耗,分析了各个驱动模式下的经济型换挡规律。
尽管对混合动力汽车模式切换及换挡问题已有大量研究,但大都单一针对模式切换问题或换挡问题,同时考虑模式切换和换挡问题时,二者会有同时触发的冲突点,虽有学者针对乘用车DCT的冲突点问题进行过研究 [14] ,但对采用自动变速器的商用车鲜有模式切换和换挡冲突问题的 研究。
本文针对某款并联混合动力商用车,搭建其驱动系统各部件的效率模型。在考虑油电转化系数的同时,将车辆行驶过程中的模式切换问题和换挡问题融合在一起,利用驱动系统的整体效率划分驱动模式的切换边界及换挡规律,获得了最佳经济性的模式切换边界和换挡规律。为贴合商用车的驾驶循环,使用中国重型商用车行驶工况CHTC-HT循环验证了控制策略的有效性。
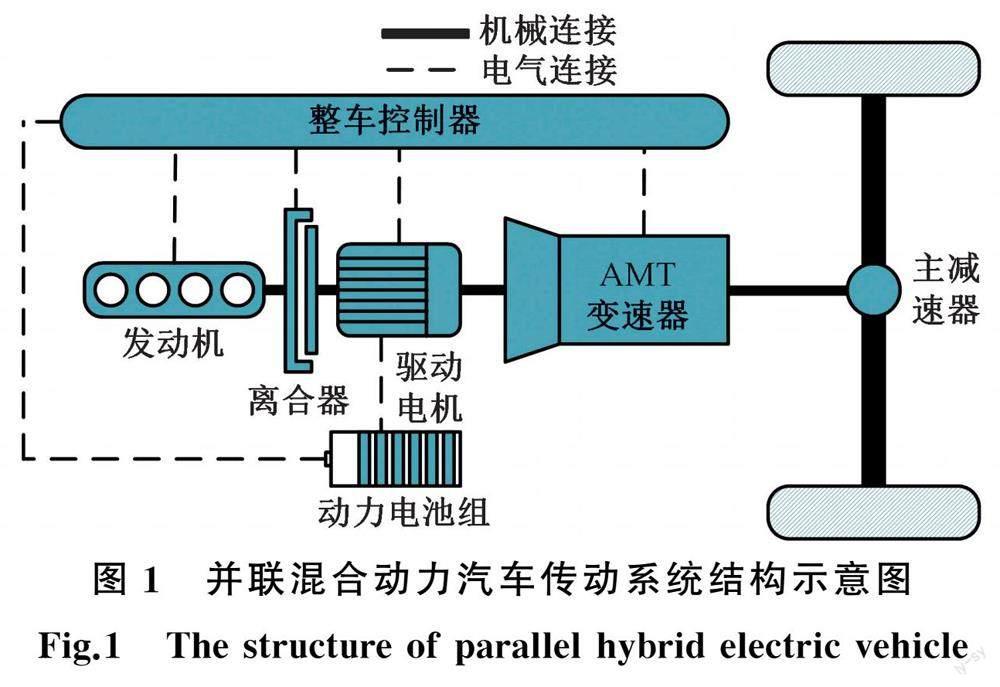
1 混合动力汽车构型
图1所示为某P2构型并联混合动力商用车的动力学模型,传动系统包括发动机、离合器、驱动电机、变速器、主减速器等。各部件的具体参数如表1所示。发动机和驱动电机可以根据车辆的行驶工况合理分配输出扭矩。根据不同的扭矩分配方式,车辆的行驶模式可分为电机驱动模式、发动机驱动模式、行车充电模式、混合驱动模式。四种驱动模式的能量流如图2所示。
2 并联混合动力汽车关键部件的效率 模型
本文的研究目标是混合动力汽车行驶过程中的驱动系统效率最优,因此需要获得发动机、驱动电机、动力电池组等驱动系统各部件的效率模型。
发动机效率模型通过发动机台架试验获得,先获得不同扭矩、转速下的发动机油耗率,再经数据处理和插值拟合的方法得到发动机燃油消耗率与转速和扭矩的关系,最后通过下式
η e = g e R 3 600 000 (1)
式中,η e 为发动机效率;g e 为燃油消耗率, g/(kW·h) ;R为燃油热值, J/g 。
将燃油消耗量转化为效率,即可得到发动机的效率模型。图3为发动机的效率等高线图。
驱动电机的效率模型同样在台架试验中获得,先获得驱动电机在不同转速、扭矩下消耗的电量,通过数据处理与插值拟合得到驱动电机的外特性曲线和效率等高线图(图4)。
动力电池组的效率模型主要考虑电池的充放电效率,忽略其他部分的能量损耗,得到电池的充放电效率 [16] :
η charge = E- E 2-4P charge R charge 2P charge R charge P charge <0 (2)
η discharge = 2P discharge R discharge E- E 2-4P discharge R discharge P discharge >0 (3)
式中,η charge 、η discharge 分别为电池的充电效率和放电效率;E为电池的电动势;P charge 、P discharge 分别为充电功率和放电功率;R charge 、R discharge 分别为电池的充电内阻和放电内阻。
由式(2)、式(3)可以看出,电池的充放电效率与电池内阻、充电功率、电动势有关,而电池的内阻受电池荷电状态(SOC)的影响 [16] 。本文选用的电池内阻随电池SOC值 S SOC 变化的曲线如图5所示。电池的充放电内阻在 S SOC 大于70%和小于30%时较大,在30%~70%之间时较小,故将此区域定为电池的高效率区域。
3 系统效率最优的边界划分方法
3.1 油电转化效率
并联混合动力汽车的驱动部件中,电机的驱动效率要远高于发动机,但电机驱动所消耗的电能由发动机消耗燃油产生,因此在计算电机驱动过程中的实际使用效率时,要考虑发动机消耗燃油发电的损耗。
为合理计算并联混合动力汽车行驶过程中电机的实际使用效率,将混合动力汽车行车充电模式下电池充电过程中储存的电能与发动机用于发电而消耗的化学能(燃油)的比值定义为油电转化效率η + [17] 。
汽车工作在发动机驱动模式下时,发动机功率为
P e =T e n e =T req n (4)
汽车工作行车充电模式下(相同工况)的发动机功率为
P′ e =T′ e n e =(T req +|T m |)n (5)
電池的有效充电功率为
P b =T m n m η m η charge (6)
式中,T req 为变速器输入端的需求扭矩;T e 为发动机扭矩;T m 为电机扭矩;n为变速器输入端的转速;n e 为发动机转速;n m 为电机转速;η m 为电机效率。
则油电转化效率为
η += P b P′ e η′ e - P e η e = |T m |n m η m η charge ( T req +|T m | η′ e - T req η e )n e (7)
根据式(7),通过仿真计算发动机不同转速和需求扭矩下的油电转化效率,结果如图6所示。本文车辆模型在需求扭矩200~500 N·m 之间的油电转化效率最高,故可将行车充电模式的工作区间限制在需求扭矩200~500 N·m 内,以获得最佳的充电效率。为方便后续计算,油电转化效率取该区间的平均值0.36。
3.2 各驱动模式下的换挡规律
混合动力汽车行驶过程中,控制系统根据当前行驶工况控制驱动系统的各部件,通过切换行驶模式和更换变速器挡位提高驱动系统的工作效率,降低整车的燃油消耗和排放。 接下来分别讨论在以效率最优为目标时,混合动力汽车各个模式下的换挡规律。混合驱动模式下的系统效率为
η= T req n T e n e η e + T m n m η discharge η m η +
n=n e =n m =vi 0i g /r (8)
約束条件为
T e , min ≤T e ≤T e , max T m,min ≤T m ≤T m,max n e , min ≤n e ≤n e , max n m,min ≤n m ≤n m,max
S SOC,min ≤S SOC ≤S SOC,max (9)
式中,i 0为主减速比;i g 为变速器传动比;v为当前车速;r为车轮半径。
将各个挡位的传动比、车速、需求扭矩代入式(8),求得混合动力汽车在混合驱动模式时不同挡位、车速及需求扭矩下的驱动系统效率,结果如图7所示。再将各个挡位效率曲面的交线投影到车速 需求扭矩平面,得到随车速、需求扭矩变化的经济型换挡规律,如图8所示。
同理,依次求得电机驱动模式、发动机驱动模式、行车充电模式下的各个挡位效率和换挡规律,分别如图9~图11所示。
3.3 模式切换边界划分与综合换挡规律
混合动力汽车的模式切换条件除与车速和需求扭矩有关外,电池的SOC值也是影响模式切换的因素之一。电池SOC值较低时,继续让电机驱动车辆行驶不仅效率低,而且会影响电池的使用寿命;电池SOC值较高时,若发动机消耗燃油给电池充电,则会消耗更多的燃油。因此最好的方式就是将电池SOC值维持在高效率区域 [18] 。
电池SOC值处于30%~70%时,车辆可工作在发动机驱动模式、电机驱动模式、混合驱动模式和行车充电模式。将这4种驱动模式下的效率曲面结合在一起,比较相邻模式间的系统综合效率,找出效率曲面的交线,即驱动模式切换边界曲线。将该曲线投影到车速 需求扭矩平面,就可得到车辆在不同车速和需求扭矩下的模式切换边界,如图12所示。行车充电模式的范围也在上述油电转化系数限制的工作区间之内。
将图9~图11中的换挡规律曲线与图12中的模式切换边界曲线整合在一起,得到混合动力汽车的综合工作规律。对综合工作规律图中的曲线相交区域进行适当的修正,得到修正后的模式切换边界和综合换挡规律,如图13所示。
电池SOC值低于30%时,电机只工作在发电状态,不继续驱动车辆行驶,车辆只在发动机驱动模式和行车充电模式下工作。将发动机驱动模式的效率曲面和行车充电模式的效率曲面结合,得到电池SOC值低于30%时车辆的行驶模式边界划分和换挡规律,如图14所示。
同理,电池SOC值高于70%时,发动机不再消耗燃油给电池充电,仅在制动时利用电机回收制动能量,车辆在电机驱动模式、发动机驱动模式、混合驱动模式下工作。将这3种模式的效率面结合,即可得到当电池SOC值高于70%时车辆的模式边界划分和换挡规律,如图15所示。
本文的控制策略逻辑如图16所示,控制器首先根据当前电池的SOC值,判断电池SOC值所处的区域。电池SOC值处于30%~70%时,按照图13的驱动模式边界和换挡规律进行控制。将当前车速和需求扭矩作为工况点的横纵坐标,标记在图13的坐标系中,根据该点所处的区域决定车辆当前的驱动模式和行驶挡位。电池SOC值低于30%或高于70%时,分别按照图14b、图15b进行控制。
4 仿真验证
为测试本文所提控制策略的性能,以GB/T 38146.2-2019附录A中规定的中国重型商用车行驶工况(CHTC)为仿真工况,分别对策略的SOC值维持性能和燃油经济性能进行仿真分析。本文研究车辆属于超过5.5 t的载货车,使用图17所示的CHTC-HT行驶工况。
4.1 SOC维持性能
为测试本文所提控制策略的SOC维持性能,设置电池初始SOC值为40%、60%、80%,测试其初始电量在低、中、高三种状态下连续10个CHTC-HT循环后的SOC变化和燃油消耗量。如图18所示,在10个驾驶循环内,3种SOC初始值的电池SOC值 S SOC 基本都能维持在30%~70%之间即电池高效率区间内。初始 S SOC 为80%时,电池 S SOC 一直维持在一个很高的水平,且有一段时间的 S SOC 超过70%,这是因为在单个循环末端,车辆由高速行驶制动到停车状态,回收了部分制动能量,故电量超过高效率区间上限,并非是发动机消耗燃油给电池充电。初始电量为60%时,电池 S SOC 一直在高效率区间内,且初始 S SOC 与结束 S SOC 几乎相等, 证明本文所提控制策略能维持 S SOC 的平衡。初始 S SOC 为40%时,虽然电池 S SOC 有几次下降到30%附近,但都没有低于30%,这说明本文提出的控制方法能将电池 S SOC 维持在高效率区间。
如图18b所示,初始电量越高,消耗的燃油越少,这是由于高电量工况下,发动机无需给电池充电,故减少了部分燃油消耗。低电量工况下,电池达到高效率区间的下限时便不再输出电能,这时需要发动机消耗更多的燃油驱动车辆行驶并给电池充电。
4.2 燃油经济性能
为测试本文提出的控制策略在燃油经济性方面的表现,将其与电辅助控制策略进行仿真对比。图19展示了两种控制策略在连续10个CHTC-HT工况下的 S SOC 变化曲线和油耗曲线。从电池 S SOC 来看,效率最优控制策略的 S SOC 由开始的60%下降到結束的59.4%,电辅助控制策略的 S SOC 下降到56.7%,这证明效率最优控制策略能满足电池SOC平衡的要求。 S SOC 在单个驾驶循环内呈现出先下降、后上升的趋势,这是因为在循环前期,车辆在低速行驶时多利用电机驱动,在中高速行驶时,利用发动机驱动并给电池充电,这导致 S SOC 先下降、再上升。从图20中的电机与发动机扭矩也可以看出,在循环的前半段,尤其是在最开始的车速较低阶段,基本都是电机在驱动;电机在后半段工作在发电状态的时间要多于前半段,发动机在循环后半段的工作时间也更久。
效率最优控制策略共消耗燃油26 936 g, 电辅助控制策略共消耗燃油30 341 g。图21展示了在10个连续CHTC-HT循环下两种控制策略的发动机工作点,可以看出,两种策略的发动机工作点大部分都集中在高效率区域。为更具体地描述两种控制策略的发动机工作点分布情况,展示了两种控制策略发动机工作点在不同效率区域的占比,如图22所示,发动机效率低于0.35的区域中,电辅助控制策略的工作点个数占总数的12%,效率最优控制策略的占比为5%。
这说明效率最优控制策略能更好地避免发动机工作在低效率区域,达到节省燃油的目标。
两种控制策略在能耗方面的仿真结果如表2所示。两种控制策略的初始 S SOC 与结束 S SOC 相差不大,基本都能维持SOC平衡。效率最优控制策略的百公里油耗为18.61 L,电辅助控制策略的百公里油耗为20.96 L,效率最优控制策略的百公里油耗降低了11.2%。总体来说,与电辅助控制策略相比,效率最优控制策略的在整个驾驶循环中的综合能耗更少,能更好地发挥混合动力汽车的节能潜力。
5 结论
本文针对某款并联混合动力商用车,先搭建其驱动系统的效率模型,后以驱动系统效率最优为目标,获得了整车在行驶过程中的模式切换边界和经济性换挡规律,制定了效率最优的能量管理策略。在CHTC-HT驾驶循环下,对所研究的并联混合动力商用车进行仿真分析。
研究结果表明,车辆在初始SOC值分别为40%、60%、80%的工况下行驶时,电池SOC值均在高效率区域内,验证了效率最优控制策略在SOC性能维持上的有效性。效率最优控制策略的百公里油耗比电辅助控制策略低11.2%,说明效率最优控制策略具有更好的燃油经济性。
参考文献 :
[1] 秦大同, 叶心, 胡明辉,等.ISG型中度混合动力汽车驱动工况控制策略优化[J].机械工程学报,2010,46(12):86-92.
QIN Datong, YE Xin, HU Minghui, et al. Optimization of Control Strategy for Medium Hybrid Electric Vehicle with ISG at Drive Condition[J]. Journal of Mechanical Engineering, 2010,46(12):86-92.
[2] SHABBIR W, EVANGELOU S. A Threshold-changing Control Strategy for Series Hybrid Electric Vehicles[J]. Applied Energy,2019,235:761-775.
[3] WU J, RUAN J, ZHANG N, WALKER P D. An Optimized Real-time Energy Management Strategy for the Power-split Hybrid Electric Vehicles[J]. IEEE Transactions on Control Systems Technology, 2019,27(3):1194-1202.
[4] SONG K, WAN X, LI F, et al. Pontryagins Minimum Principle-based Real-time Energy Management Strategy for Fuel Cell Hybrid Electric Vehicle Considering both Fuel Economy and Power Source Durability[J]. Energy, 2020, 205:118064.
[5] 李跃娟,齐巍,王成,等.并联混合动力汽车ECMS的时变等效因子提取算法的研究[J].汽车工程, 2021, 43(2):181-188.
LI Yuejuan,QI Wei,WANG Cheng,et al. Study on Extraction Algorithm for Time-varying Equivalent Factor of ECMS for Parallel Hybrid Electric Vehicle[J]. Automotive Engineering, 2021,43(2):181-188.
[6] ZHANG Q, FU X. A Neural Network Fuzzy Energy Management Strategy for Hybrid Electric Vehicles Based on Driving Cycle Recognition[J]. Applied Sciences, 2020, 10(2):696.
[7] 唐小林,陈佳信,刘腾,等.基于深度强化学习的混合动力汽车智能跟车控制与能量管理策略研究[J].机械工程学报,2021,57(22):237-246.
TANG Xiaolin, CHEN Jiaxin, LIU Teng,et al. Research on Deep Reinforcement Learning-based Intelligent Car-following Control and Energy Management Strategy for Hybrid Electric Vehicles[J]. Journal of Mechanical Engineering, 2021,57(22):237-246.
[8] HAN X, HE H, WU J, et al. Energy Management Based on Reinforcement Learning with Double Deep Q-learning for a Hybrid Electric Tracked Vehicle[J]. Applied Energy, 2019, 254:113708
[9] TRAN D, VAFAEIPOUR M, BAGHDADI E M, et al. Thorough State-of-the-art Analysis of Electric and Hybrid Vehicle Powertrains:Topologies and Integrated Energy Management Strategies[J]. Renewable and Sustainable Energy Reviews,2020,119:109596.
[10] 黄硕,李亮,杨超,等.基于规则修正的同轴并联混合动力客车瞬时优化能量分配策略[J].机械工程学报, 2014, 50(20):113-121.
HUANG Shuo, LI Liang, YANG Chao,et al. Rule Correction-based Instantaneous Optimal Energy Management Strategy for Single-shaft Parallel Hybrid Electric Bus[J]. Journal of Mechanical Engineering, 2014, 50(20):113-121.
[11] ENANG W, BANNISTER C, BRACE C, et al. Modelling and Heuristic Control of a Parallel Hybrid Electric Vehicle[J]. Proceedings of the Institution of Mechanical Engineers, Part D:Journal of Automobile Engineering, 2015, 229(11):1494-1513.
[12] 田韶鵬,雷蕾,伍磊.并联式混合动力客车2参数换挡规律的分析与设计[J].江苏大学学报(自然科学版), 2016, 37(6):628-633.
TIAN Shaopeng,LEI Lei, WU Lei. Analysis and Design of Two-parameter Shifting Schedule for Parallel Hybrid Electric Bus[J]. Journal of Jiangsu University(Natural Science Edition), 2016,37(6):628-633.
[13] 李宏才,闫正军,王伟达,等.并联混合动力汽车改进双参数换挡规律设计[J].哈尔滨工业大学学报, 2019, 51(1):102-108.
LI Hongcai, YAN Zhengjun, WANG Weida,et al. Design Method of Improved Two-parameter Gearshift Schedule for Parallel HEV[J]. Journal of Harbin institute of Technology, 2019,51(1):102-108.
[14] LEI Zhenzhen, SONG Dongye, LIU Yonggang, et al. Analysis and Coordinated Control of Mode Transition and Shifting for a Full Hybrid Electric Vehicle Based on Dual Clutch Transmissions[J]. Mechanism and Machine Theory, 2016, 114:125-140.
[15] 赵治国,杜建,顾佳鼎,等.四轮驱动混合动力轿车经济性换挡规律研究[J].中国机械工程,2012,23(15):1877-1884.
ZHAO Zhiguo, DU Jian, GU Jiading, et al. Research on Economical Gearshift Schedule for a Four Wheel Drive Hybrid Electric Vehicle[J]. China Mechanical Engineering, 2012,23(15):1877-1884.
[16] 秦大同,龙海威,胡明辉,等. AMT中度混合动力汽车经济性换挡规律研究[J].中国机械工程,2013,24(20):2820-2825.
QIN Datong, LONG Haiwei, HU Minghui, et al. Economic Shift Rule for Medium HEV with AMT[J]. China Mechanical Engineering, 2013,24(20):2820-2825.
[17] 張炳力,张平平,赵韩,等.基于能耗计算的并联式混合动力汽车控制策略[J].汽车工程,2009,31(4):366-370.
ZHANG Bingli, ZHANG Pingping, ZHAO Han, et al. Control Strategy for Parallel Hybrid Electric Vehicle Based on the Energy Consumption Calculations[J]. Automotive Engineering, 2009, 31(4):366-370.
[18] 范光辉,余剑武,罗红,等.混合动力汽车电池性能影响因素分析与试验[J].吉林大学学报(工学版),2019,49(5):1451-1458.
FAN Guanghui, YU Jianwu, LUO Hong,et al. Influencing Factors Analysis and Experimental Study of Battery Performances in Hybrid Electric Vehicle[J]. Journal of Jilin University (Engineering and Technology Edition), 2019,49(5):1451-1458.
( 编辑 张 洋 )
作者简介 :
严正峰 ,男,1969年生,教授、博士研究生导师。研究方向新能源汽车传动系统、汽车零部件设计与制造和先进制造技术。发表论文50余篇。E-mail:Zf.yan@hfut.edu.cn。
姚明尧 (通信作者),男,1989年生,讲师、硕士研究生导师。研究方向为新能源汽车节能技术。发表论文20余篇。E-mail:yaomingyao@126.com。
