基于GaN的舰载雷达高频微波放大器设计
2024-03-27张小玲
李 楠,李 燕,张小玲
(中航工业雷华电子技术研究所,江苏 无锡 214100)
0 引 言
目前,氮化镓技术在世界范围内发展迅速,特别是在军事领域,主要原因是它能拓宽雷达的可使用范围并提升主动电子扫描阵列(AESA)型雷达的生产技术。发射/接收模块(TRM)是具有散射结构的雷达基本元件[1-2]。然而,功率放大器是TRM的关键和最耗能的部件。因此,提高功率放大器的效率,并将其他参数保持在足以获得雷达信号的水平是非常重要的。该目标的实现对于降低平均功耗和减小TRM的封装尺寸以及简化冷却系统都具有重要意义。此外,由于TRM的横向尺寸不应超过半波长,例如,对于X波段,横向尺寸约为15 mm,即相邻模块中心之间的距离为15 mm,因此雷达冷却系统对于在较高频率范围(C波段以上)工作的系统来说可能具有挑战性。如此大的TRM封装需要非常有效的冷却系统将雷达温度保持在足够低的水平。目前,TRM中使用的功率放大器典型效率不超过35%,它主要取决于带宽,而不是载波频率[3]。
雷达功率放大器设计的一个重要环节是将波形失真控制在可接受范围内,以防影响目标检测和识别的质量。有几种方法允许放大器在其压缩区域中工作,而不会对输出波形产生失真影响[4]。例如脉冲整形,以适当的方式改变波形因最小化放大器引入的失真。然而,这种方法会导致与波形相关的限制,从而导致雷达参数恶化。标准广播放大器中使用的线性化技术,如数字预失真(DPD)或包络跟踪(ET),由于雷达系统的宽带宽(在现代雷达中高达1 GHz),在雷达中未广泛使用[5]。因此,专门用于放大复杂雷达波形的功率放大器的设计方法至关重要,也完全合理。它可以归结为在最小化波形失真的同时获得尽可能好的功率附加效率(PAE)。为了实现这一目标,不仅应使用匹配网络实现最佳源阻抗和负载阻抗,还应修改晶体管结构的拓扑结构。晶体管拓扑中的干扰可能基于输入和输出晶体管电容的优化或内部匹配电路的修改。
本文从典型带宽和脉冲带宽2个方面介绍了雷达波形的特性,然后介绍了功率放大器阻抗设计的具体设计方法,并改进了Steve Cripps负载线方法,还给出GaN为核心的硬件参考设计,最后进行时域和频域模拟。
1 雷达波形特性
雷达波形主要由称为脉冲串的不同长度脉冲的特定序列组成。线性调频(LFM)信号波形是一种常见的雷达波形。典型的带宽在5~10 MHz之间,载波频率为核心频带频率或噪声信号。脉冲带宽高达1 GHz的宽带信号也被用作雷达波形。图1显示了一个雷达波形示例,即载波频率为9 GHz的脉冲线性调频,Δf=1 GHz。移动目标探测(MTD)如图2所示。这是一个由8个脉冲组成的系列,每个脉冲的持续时间为50 μs,暂停时间为200 μs;6个脉冲的脉冲持续时间为100 μs,暂停时间为400 μs;4个脉冲的持续期为200 μs,暂停时间为800 μs,载波频率f0=9.5 GHz[6]。

图1 典型雷达波形图

图2 移动目标探测图
近年来,雷达波形变得更加复杂。最常见的是,不仅相位调制,而且脉冲期间的包络调制都被用作典型的雷达波形。这对雷达放大器的参数提出了额外的要求,涉及饱和区域中的晶体管操作和幅度调制(AM)到相位调制(PM)转换的水平。
2 基于GaN的功率放大器设计
2.1 功率放大器阻抗设计
目前,微波功率放大器的设计是基于实现最佳负载阻抗,以获得所需的输出功率,同时满足电路的线性和效率要求。通常,放大器设计之前是晶体管的DC I-V特性和S矩阵测量,然后根据需要对该元件进行小信号或大信号建模。如今,许多制造商提供晶体管的非线性模型,这大大简化了设计过程。如果供应商模型不准确或不可用,最方便的方法是使用小信号方法来确定放大器的初始结构。应该注意的是,该方法假设晶体管的线性或准线性操作,并且不给出关于非线性失真的信息。因此,使用这种方法设计的放大器必须在实际工作条件下进行实验验证和调谐。通过这种方式,很容易绕过复杂的、通常充满大误差的负载/源牵引测量,特别是应考虑后续谐波的负载。基于改进的Steve Cripps负载线方法的设计[7],如图3所示,用于确定最大输出功率的最佳负载阻抗ZL。
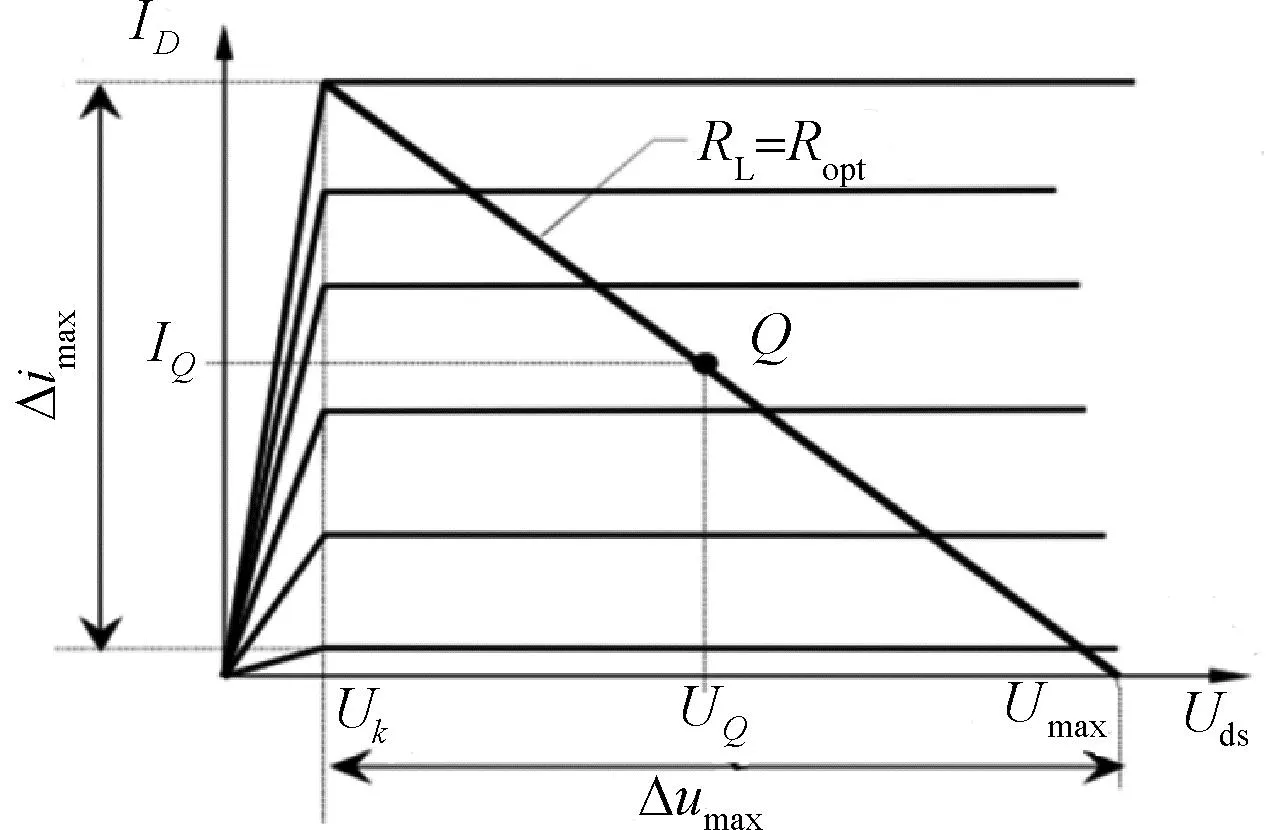
图3 最优阻抗匹配图
(1)
(2)
ZL=Ropt-jXout
(3)
式中:Ropt为最优电阻;Pmax为最优电阻对应的最大功率;Xout为系统输出的固有阻抗。
由于在晶体管模型的输出端有一个由Rds和Cds组成的并联电路,为了实现最大功率,必须满足导纳条件。
2.2 基于GaN的硬件设计
使用Qorvo TGF2023-2-02裸片晶体管,在RO4003C衬底(ε=3.38,h=0.02 mm,T=17 μm)上设计了在9~10 GHz频率范围内工作的AB级功率放大器。假设以下要求:输入回波损耗S11<-10 dB,输出功率电平Pout>9 W,PAE至少为55%,电路无条件稳定。为了计算放大器的初始结构,采用了图2所示的设计程序。随后,使用Modelitics®提供的大信号模型进行谐波平衡模拟,并计算放大器的基频和后续谐波特性以及AM-AM和AM-PM失真水平。小信号增益S21和输入回波损耗S11以及放大器的硬件走线示意图分别如图4和图5所示。

图4 增益与输入回波损耗的关系

图5 放大器硬件走线示意图
放大器的传输特性,即9~10 GHz频率范围内的输出功率Pout和增益G,如图6所示。
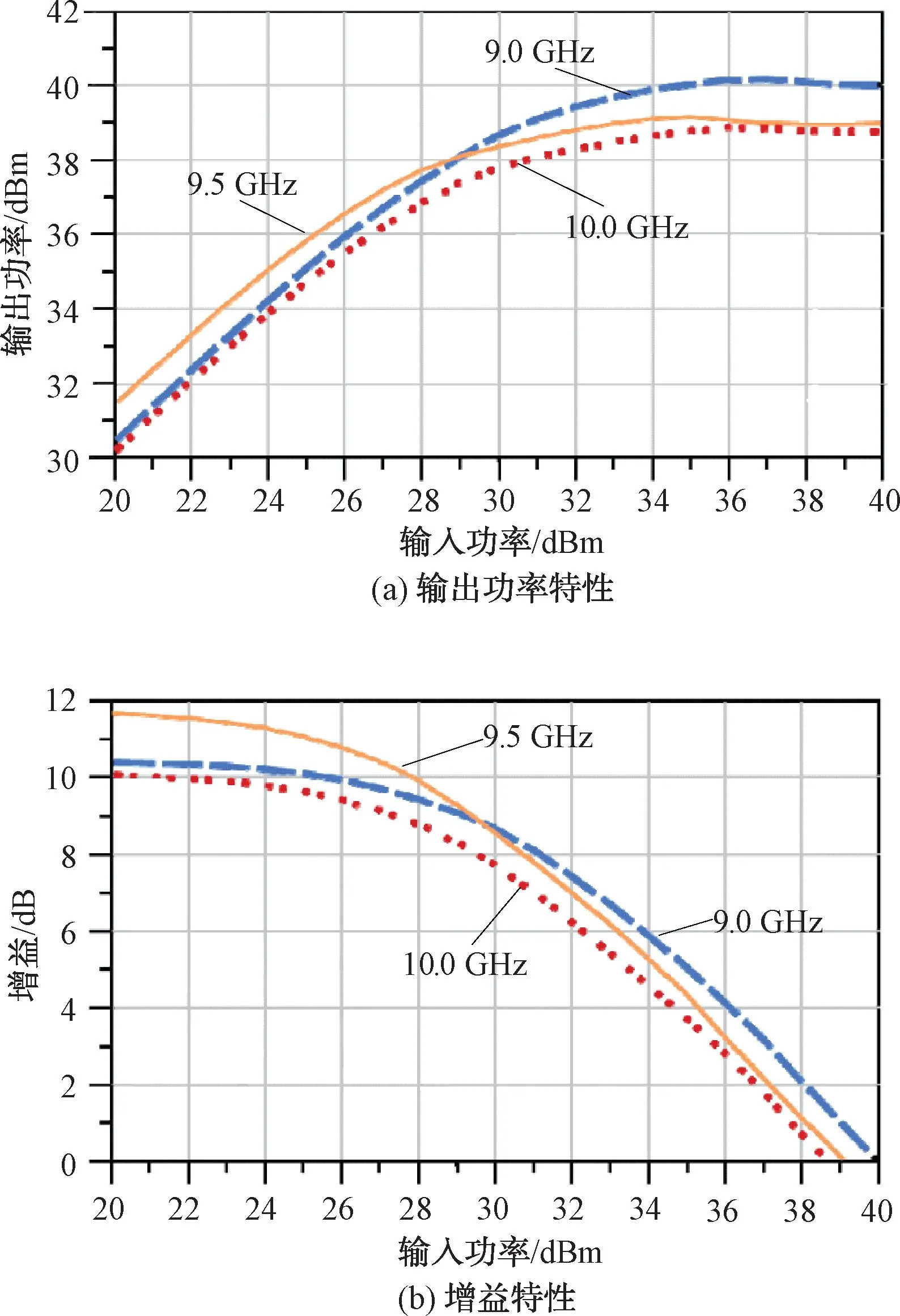
图6 放大器在9 GHz、9.5 GHz和10 GHz下的传输特性
f=9.5 GHz的最大输出功率电平等于39.5 dBm(9 W),在静态偏置点Uds=28 V和IDQ=125 mA(AB类)的最大PAE为57%。使用第3节中描述的设计方法所获得的结果是令人满意的。然而,这种方法不能给出关于输出波形失真的全部信息。现代AESA雷达使用的射频(RF)脉冲序列随着时间的推移而不规则,并引起与热效应和俘获效应相关的短期和长期记忆效应。因此,时域波形也应该针对不规则的RF脉冲串进行模拟,因为频域中的模拟不能提供关于这种效应引起的失真的明确信息[8]。
此外,检查在时域中观察到的失真是否与在频域中定义的失真一致是非常重要的,例如AM-AM和AM-PM转换。此外,在X或更高波段工作的放大器输出端的时域信号测量也很复杂,因此,放大器应该在时域中建模。
3 时域仿真分析
市场上可用的电路模拟器使时域模拟成为瞬态分析,该分析的结果是电流和电压的时间过程。虽然只有集总元件的电路瞬态分析不是一个复杂的过程,但是色散、趋肤效应或介电损耗会显著影响模拟电路的复杂性,包括分布式元件,如微带线部分。这些限制主要是给定输电线路模型的准确性和复杂性的结果。
在射频电路模拟器中实现的微带线模型由频域方程描述。在时域模拟过程中,这些模型从频域(例如通过Keysight高级设计系统(ADS)卷积引擎)转换到时域。在大多数模拟器中,微带线模型可以分析到fmax=200 GHz,其中fmax是分析的最大频率。因此,需要限制分析范围,以便在转换过程中模拟器不能使用频率高于fmax的模型。否则,可能会出现较大的模拟误差[9]。
微波放大器的输入输出匹配网络通常由多段微带线组成,因此,第一步就对输入匹配网络进行了仿真,以检查仿真本身引入的误差。为此,ADS软件中的微带线模型由示例雷达波形激励。由于分析频率和适当参数选择的限制,获得了输入匹配网络本身引入的信号失真信息。这是关于由无源微波电路引起的失真参考信息。信号失真是由微带线的插入损耗和时域模型的不精确性引起的。第2步使用36 dBm脉冲电源在时域中模拟完整的放大器电路。测试波形由在载波频率f0=9.5 GHz下具有不同持续时间的脉冲组成。在最初的分析之后,于脉冲末端以及相移处注意到简单的波纹。由于未考虑动态热效应,因此未观察到包络线下降。2个通道温度下放大器输出端的测试波形如图7所示。

图7 测试放大器输出端的2个通道温度波形
4 结束语
本文简要介绍了采用GaN HEMT晶体管的雷达功率放大器的有关问题。基于上述方法,设计了X波段功率放大器。放大器的测量结果如下:在57%的PAE下输出功率大于38.8 dBm,在9~10 GHz频率范围内增益S21>11 dB。所获得的结果和结论为进一步研究奠定了基础,并试图优化专门为雷达波形设计的功率放大器,以开发这种电路的设计方法。首先要开发电热模型,考虑动态热效应作为热响应,该热响应由对应于GaN HEMT的连续层的热时间常数以及晶体管的热瞬态阻抗来描述。下一个任务将涉及用于时间分析的GaN HEMT模型的开发。另一个重要问题是修改晶体管的拓扑结构。
