基于编队多舰雷达侦察的反射增批抑制技术
2024-03-27魏旭鸿罗宇凡何抒慧吉宇人
魏旭鸿,罗宇凡,何抒慧,吉宇人
(中国船舶及海洋工程设计研究院,上海 200011)
0 引 言
当无人舰船采用编队形式执行作战任务时,编队阵形会导致雷达侦察出现比较严重的增批现象。增批现象主要是由于海面、舰上建筑等多次反射造成的。然而对于密集编队,由于在反舰导弹末制导雷达波束内同时存在多艘无人舰船目标,舰载雷达侦察载荷面临的挑战不仅仅是海面和船上建筑等多次反射的影响,还涉及到波束内无人舰船间电磁波多次反射的问题。这将导致比战斗无人舰船更严重的增批问题,进而无法准确确定来袭目标的数量和具体方式,也无法有效干扰威胁目标。
许多研究机构和高校主要从雷达信号处理、编队协同和多传感器融合等方面入手,提出了一些方法和算法[1]。例如,利用波束形成和波束去叠加等技术手段,对接收到的雷达信号进行分析和处理,以降低反射增批现象的影响;通过编队中多艘无人舰船的雷达设备之间的数据融合,实现对雷达信号的共同分析,提高雷达侦察结果的准确性和可靠性;同时关注编队中的协同作战和雷达融合技术,以应对雷达波反射增批现象。在编队协同方面,探索了无人舰船之间的通信和信息共享,以实现雷达信号的联合处理和分析,通过综合利用雷达、红外、声纳等多种传感器的信息,提高目标识别和定位的准确性[2]。
为了有效降低增批的影响,需要对编队中每艘无人舰船的雷达侦察信息进行融合处理,从而降低增批现象,并提升干扰发射引导的准确度。本文提出了一种基于编队多舰的雷达侦察反射增批抑制技术,旨在有效缓解密集编队下的增批现象。该技术通过协同作战中多艘无人舰船的雷达设备,共同分析和处理接收到的雷达信号。首先,对每艘无人舰船的雷达侦察结果进行收集和整合。然后,利用信号处理算法对融合后的数据进行分析,以准确区分直达波和反射波,并降低增批现象的发生。通过多艘无人舰船间的合作操作,这种技术最大限度地利用了多个信息源,提高了雷达侦察的准确性和可靠性。
这种基于编队多舰的雷达侦察反射增批抑制技术具有重要意义。它不仅能够降低增批现象,提升雷达侦察的效果,还能有效减少误判和干扰目标的准确度。通过提高侦察结果的准确性,这项技术能够增强作战无人舰船的战斗能力,为无人舰船的作战任务提供更有效的支持。
1 反射增批抑制技术
如图1所示,反射增批抑制技术的研究主要分为3个部分:
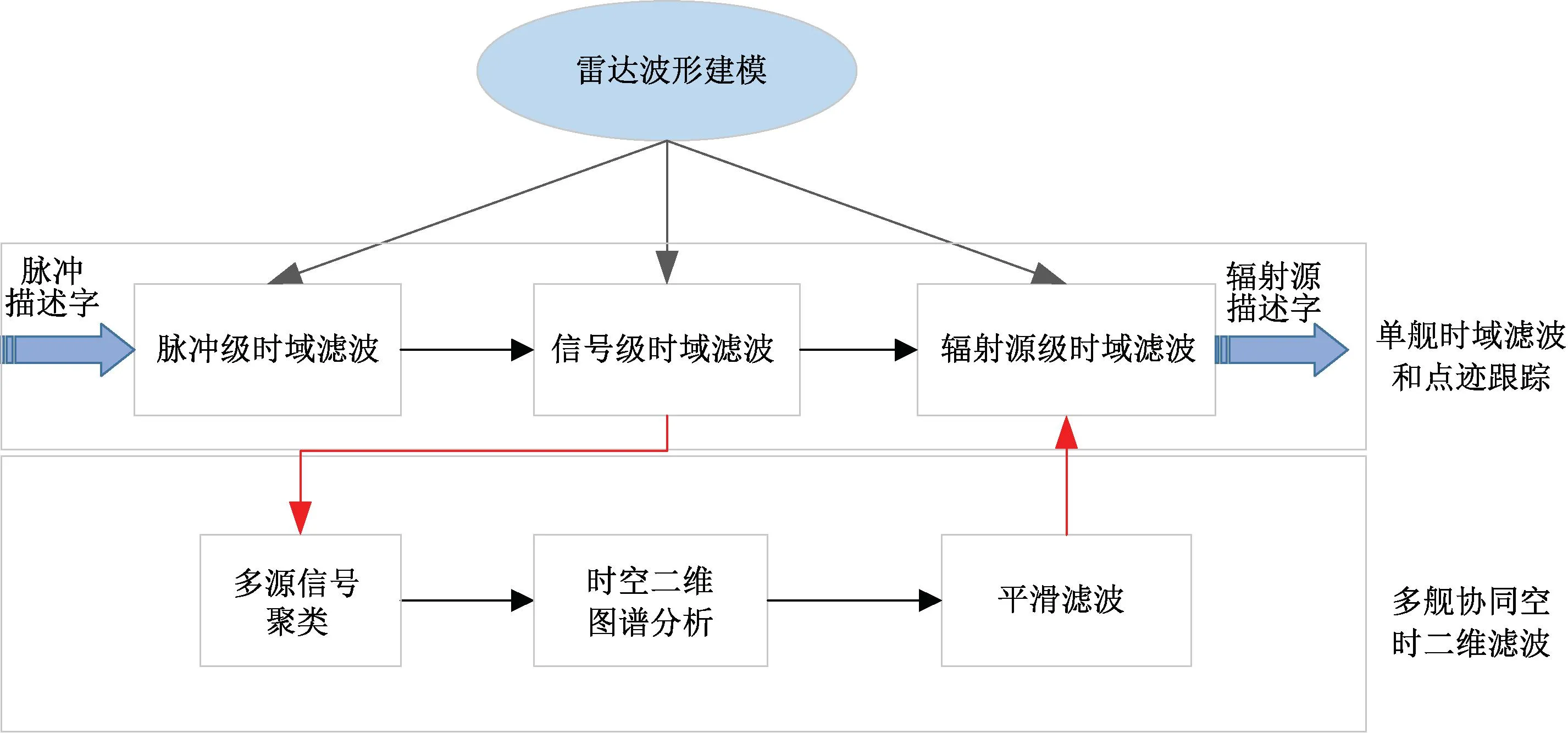
图1 反射增批抑制方案框图
(1) 基于句法模型的雷达波形分层级建模[3];
(2) 多层级联合的时域滤波算法研究[4],在单舰上进行时域滤波,并结合多舰滤波结果进行点迹跟踪;
(3) 多舰协同的空时二维滤波算法[5],采用多舰源信号进行时空二维图谱分析,并滤除反射虚假和噪声。
1.1 基于句法模型的雷达波形分层级建模
根据雷达用途、信号样式、参数类型、扫描特性,从雷达数据库及侦收到的原始脉冲中提取能够表征雷达行为动作的基础波形及不同基础波形的组合;再按照雷达用途对样本归类,对每类雷达按照信号样式再进一步分类,得到每一雷达动作基础波形及不同组合形式与每一雷达用途的每一信号样式之间的一一对应关系(见图2),同时得到了雷达工作模式动态调整与雷达动作时序样式切换的时刻关联[6]。统计与雷达用途相对应的雷达动作基础波形及组合波形的类型和数量,明确雷达典型用途与各维参数类型及数值范围对应的关系,进行建模前准备,为辐射源识别提供支撑。
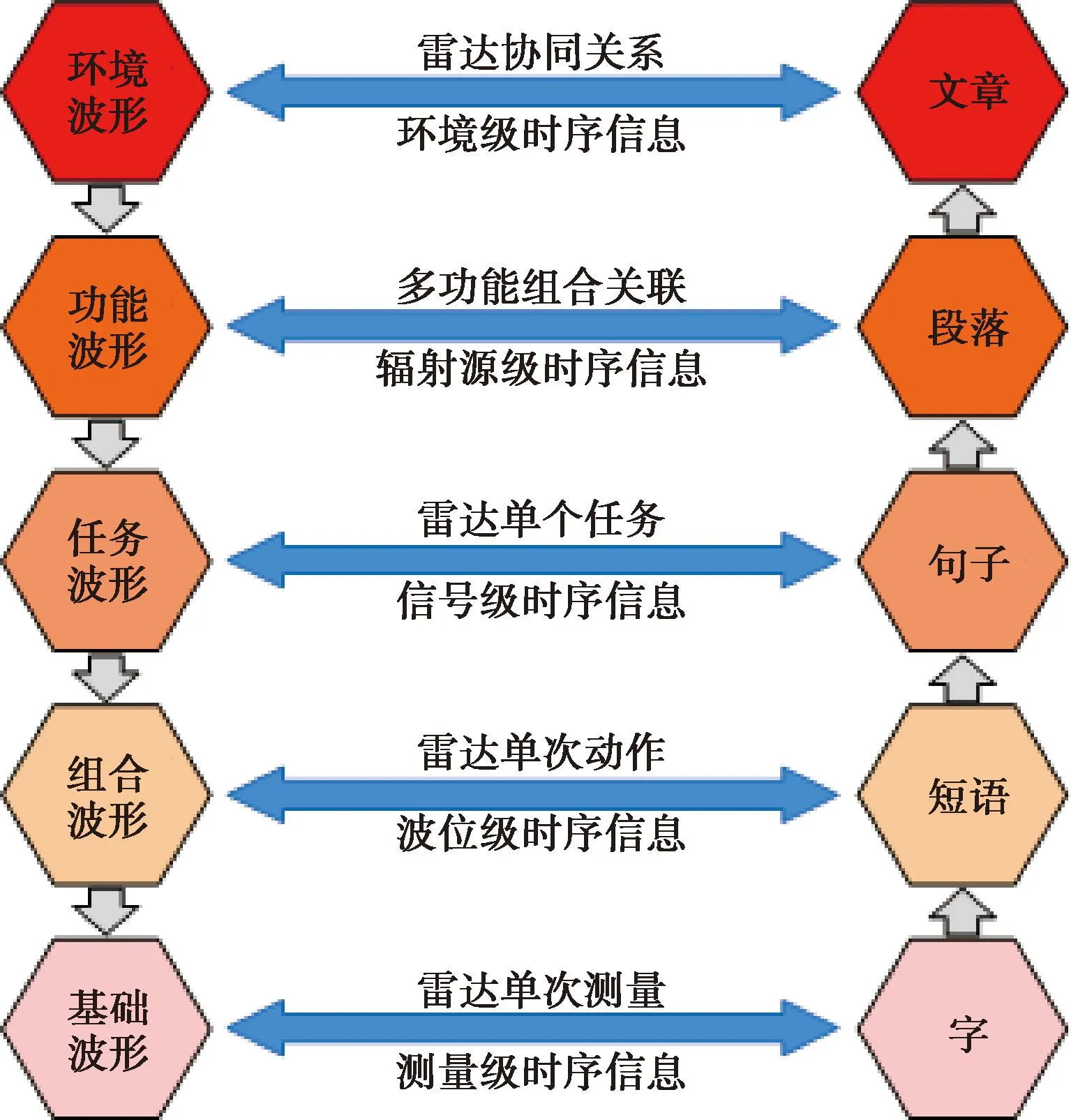
图2 句法模型映射关系
1.2 多层级联合的时域滤波算法
对于无人舰船编队中的单艘无人舰船,到达无人舰船侦察天线的口面的电磁波主要包括直达波和反射波。直达波的传播路径无阻碍,基本按照直射路径到达侦察天线口面;而反射波会经过1个或者多个掩体反射的多条传播路径到达侦察天线。
一般而言,雷达侦察载荷侦收的反射波功率要小于直达波,到达天线口面的衰减功率为:
(1)
式中:dd为直达波传播距离;dr为反射波传播距离;ρi·Pi为第i个反射掩体的衰减。
反舰导弹的电磁波信号可能会经过多艘无人舰船的反射而到达某艘无人舰船,单次反射的距离差为0≤Δd≤2d,d为反射无人舰船与电磁侦收无人舰船的距离。按照4列编队阵型以及窄波束宽度的约束,掩体反射衰减以近似镜面全反射计算,单次反射衰减约1 dB,所以,最小反射衰减为:
(2)
当前雷达侦察载荷采用喇叭天线,如图3为天线方向图。30°入射和法线入射的增益相差约5 dB左右,相当于3次最小反射衰减量。
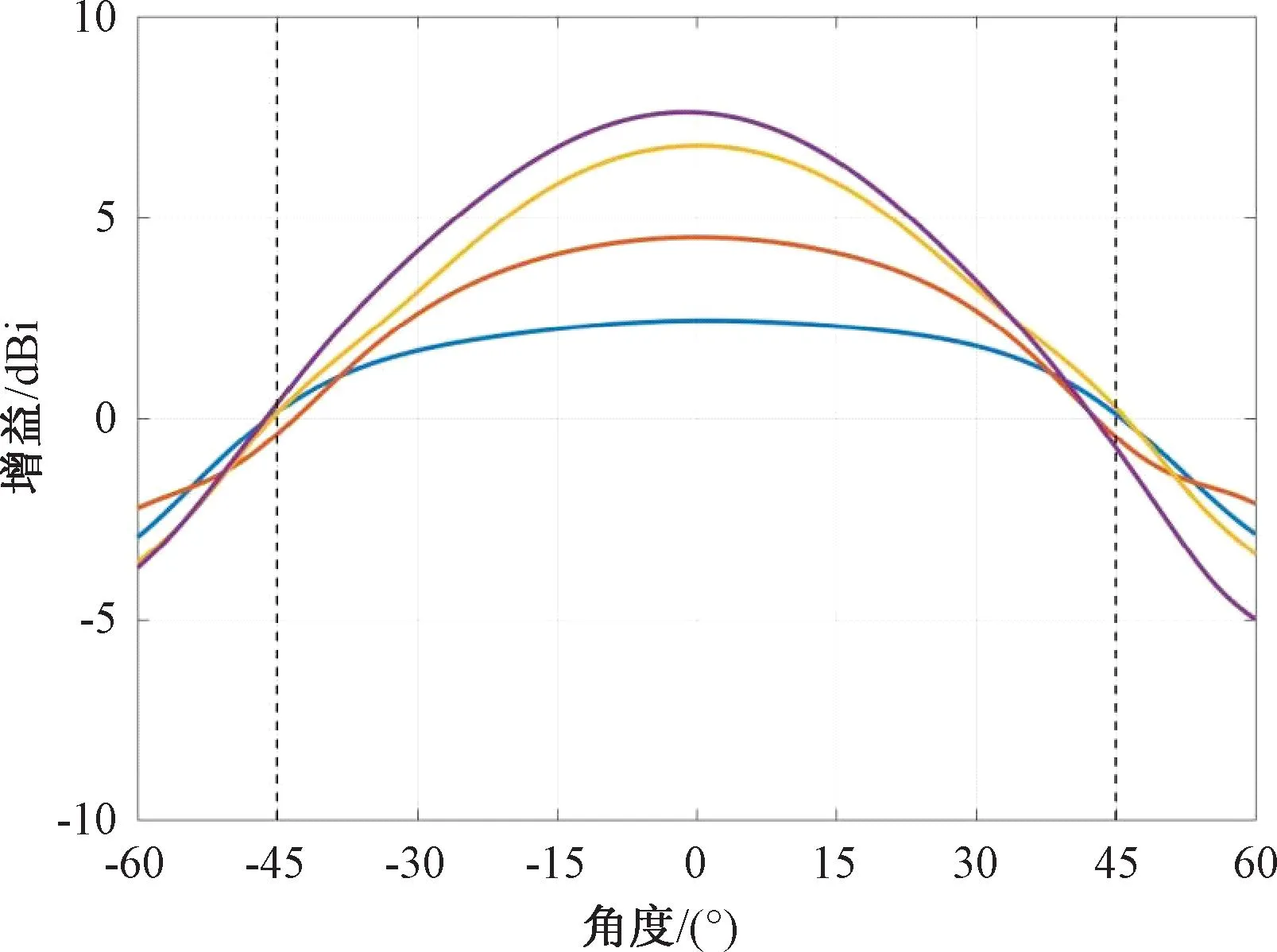
图3 天线实测方位面水平极化方向图(低频到高频)
由于不同反射掩体的反射率和电磁波信号进入侦察天线的入射角不可预测,侦收的反射波甚至比直达波的功率还要大,再加上系统的测量误差,仅通过能量维区分真实信号和反射信号是不可行的。
通过分析真实信号和反射信号的时间关系发现,直达波都会比反射波早先到达,并且不同的反射波与直达波的到达时间差存在差异,直达波与反射波的到达时间延迟差D为:
(3)
由于无人舰船相距较近,主要为邻近反射。单次反射最大延迟D>6 μs和3次反射最大延迟D>30 μs,而超过3次反射的多反射延迟将会更大,功率衰减也同样会增大,非邻近反射类似。经过无人舰船间多反射的虚假信号可以采用能量差异去伪的方式进行去除。
反舰导弹雷达波形的重复周期一般为几百μs~2 ms,超过无人舰船间的反射延迟。通过观察多个重复周期可知,真实信号和反射信号的脉冲在时间上是一种明显的伴随关系,而且短时间内的同步性不易改变,并且脉冲参数也基本接近,另外,反射信号都晚于真实信号。根据前文对雷达波形的分析和分层级建模,本文提出多层级动态联合的时域滤波算法,如图4所示。

图4 多层级联合时域滤波算法框图
开设100 μs时间处理窗(脉冲级处理窗)。为了尽快减少脉冲交织引起的信号提取压力,基于序贯脉冲的先后顺序,以时间窗内功率较大的脉冲为基准,按照一定能量落差门限删除同频脉冲,对于能量落差较小的脉冲,打上疑似反射标记,再根据到达角进行提取区分,形成不同的信号识别结果。
开设100 ms时间处理窗(信号级处理窗)。结合信号的反射标记占比率,对提取的信号进行参数相关性分析和脉冲对同步性统计。由于作战电磁环境比较复杂,提取的信号会存在污染和残缺,所以无法追求参数全相关和所有脉冲对绝对同步,为了提高容错度,允许一定的虚假率,设定相关性和同步性门限,判定存在反射信号,并且剔除时间靠后的信号。若真实信号被污染或者因漏脉冲而不完整,可能会使得真实信号被误判为反射信号,亦或者相关性和同步性不满足,使得反射信号无法全部去除。
开设秒时间处理窗(辐射源级处理窗)。为了剔除多反射的虚假反射信号或衍生出的其他虚假信号,对波形参数相关的辐射源信号片段进行时间同步性分析,采用基于能量差异去伪的方法,对满足伴随关系的低功率信号进行剔除。
反舰导弹为运动目标引入运动模型随时间变化的状态变量,采用一种改进的卡尔曼滤波方法对产生的辐射源信号点迹进行预测和估计[7],实现对虚假目标的加速剔除,并保证运动目标的稳定跟踪。
1.3 多舰协同的空时二维滤波算法
由于单舰在反舰导弹的照射波束内的位置可能在边缘或者反射来源较多,仍存在反射信号无法完全剔除或者概率性地误判真实信号的情形,基于真实信号的稳定度大于反射信号,可以采用多样本相互印证的办法进行反射虚假信号的滤除。本文采用多舰协同的空时二维滤波算法去除单舰未能完全抑制的反射增批信号。
多舰协同时,需将每艘无人舰船侦察到的雷达信号汇总,对接收到的信号进行空时二维滤波处理,如图5~7所示。

图5 方位和时间二维图
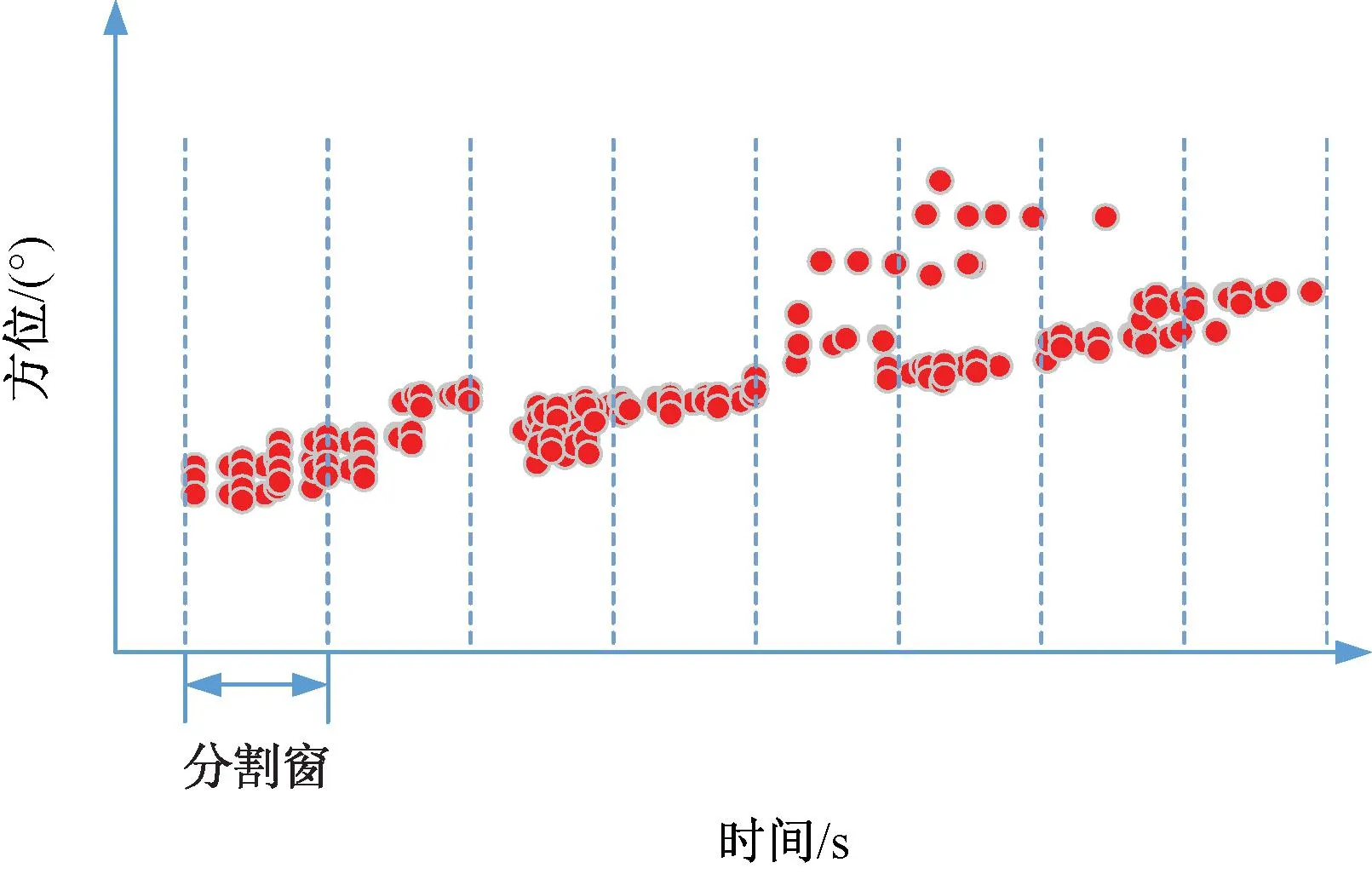
图6 分割处理示意图
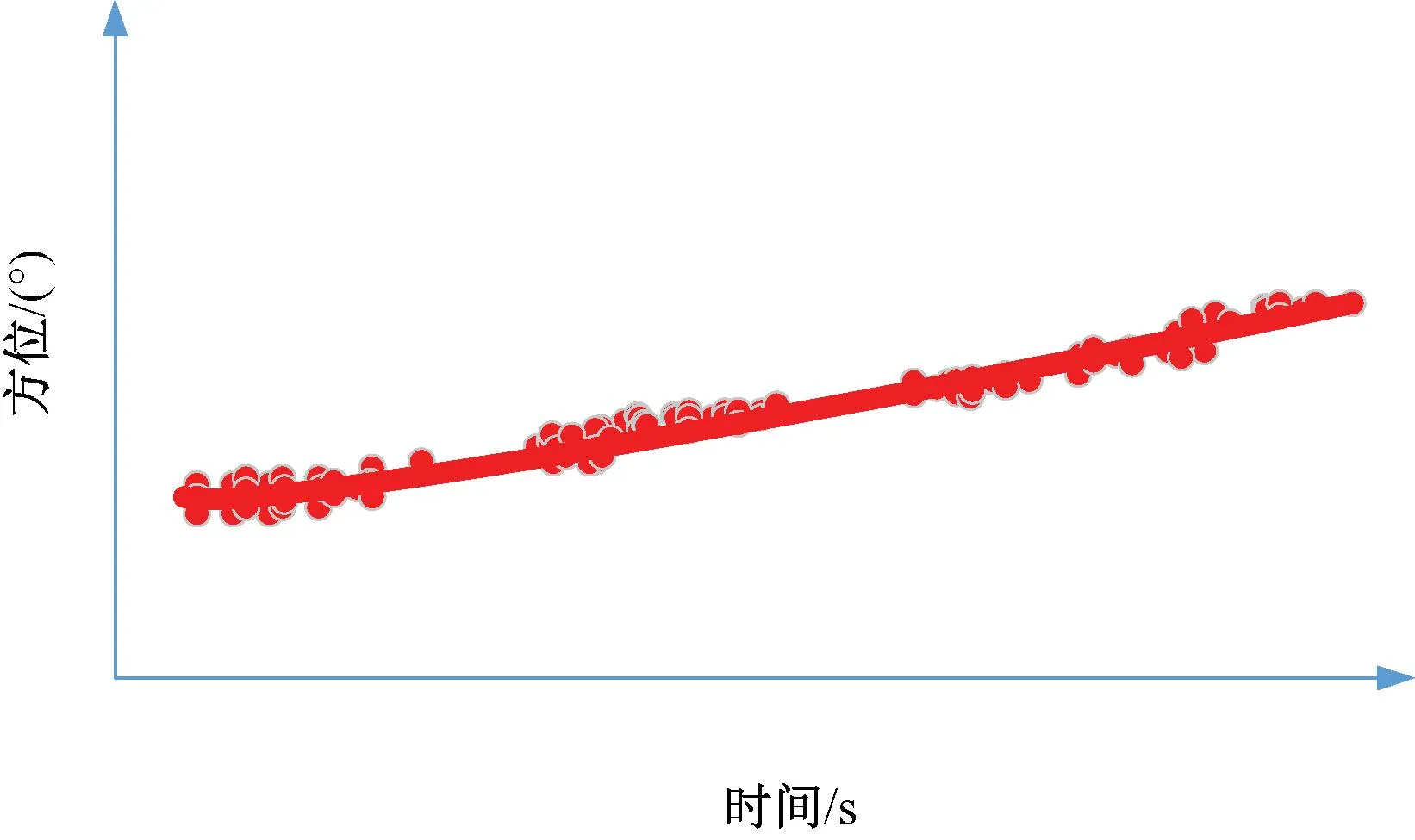
图7 平滑滤波后的方位和时间二维图
(1) 多源信号聚类。对其他无人舰船传输的雷达信号与本舰的雷达信号进行时间对齐,并按照雷达波形进行参数聚类,滤除明显不相关的信号。
(2) 建立空时二维图谱。按照信号的起始时间和方位信息进行空时二维图谱的建立,并进一步对起始时间进行一次差图谱。
(3) 凝聚分割。对已经成簇的锐化图像进行分割,并对邻近簇按照空时相似度进行凝聚处理。
(4) 平滑滤波。根据凝聚处理的结果进行噪声抑制,并挑选出聚类能量较大的分割图像进行平滑滤波,将统计结果分发回互传无人舰船。
2 仿真场景设计
仿真设定导弹分别从无人舰船编队的30°、60°方向来袭,二者起始距离为30 km,导弹速度为0.272 24 km/s(0.8 Ma),无人舰船编队按照8行4列设计(如第3行第2列舰船编号为32),该队形下产生的3种场景态势如图8所示。

图8 编队30°、60°入射态势图
仿真试验信号采用载频跳频,重频脉组,脉宽捷变,参数如表1所示。
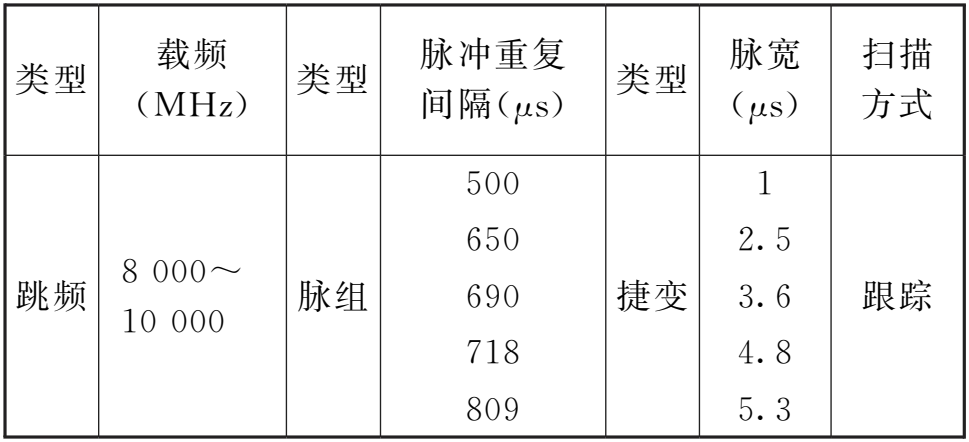
表1 仿真信号样式
在导弹向编队30°入射态势下,将波束覆盖范围内的62、53、63、73、64号无人舰船作为研究对象来验证此反射增批技术的可行性,各无人舰船受到主信号(用‘0’标示)和可能的反射信号照射情况如表2所示。例如,62号舰除收到主信号外,还能够收到53号舰的反射信号;53号舰除收到主信号外,还能够收到62号舰的反射信号。
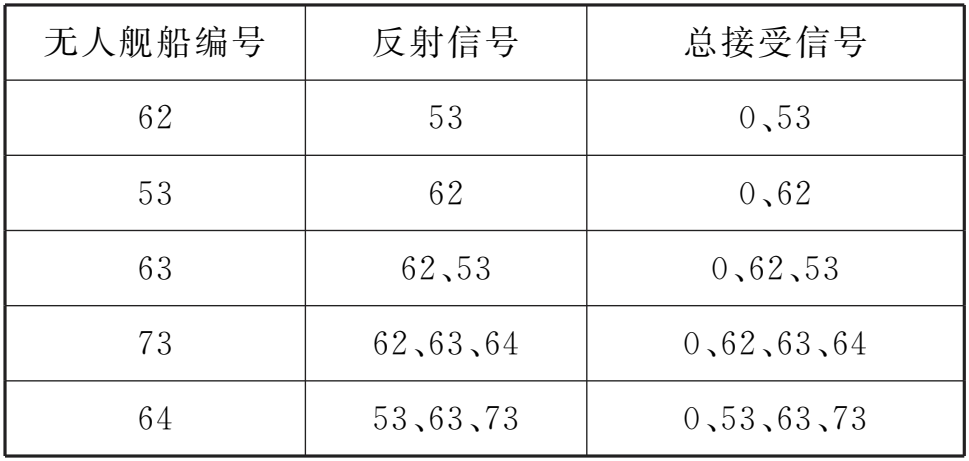
表2 编队30°入射波束覆盖范围内各舰信号情况
在导弹向编队60°入射态势下,将波束覆盖范围内的52、43、53,63和54号无人舰船作为研究对象来验证此反射增批技术的可行性,其它无人舰船不做考虑,则各艘无人舰船受到主信号(用‘0’标示)和可能的反射信号照射情况如表3所示。其中,52号舰除收到主信号外,还能够收到43号舰的反射信号;43号舰除收到主信号外,还能够收到52号舰的反射信号;53号舰除收到主信号外,还能够收到52、43号舰的反射信号;63号舰除收到主信号外,还能够收到52、53、54号舰的反射信号;54号舰除收到主信号外,还能够收到43、53、63号舰的反射信号。

表3 编队60°入射波束覆盖范围内各舰信号情况
3 增批抑制效果验证
3.1 单舰去反射效果
在导弹向编队30°入射情况下,根据反射仿真数据统计,64号舰接收到的主信号和反射信号脉冲最复杂,反射增批现象最为严重。在导弹向编队60°入射情况下,根据反射仿真数据统计,54号舰接收到的主信号和反射信号脉冲最复杂,反射增批现象最为严重。图9为方位增批脉冲幅度态势图。
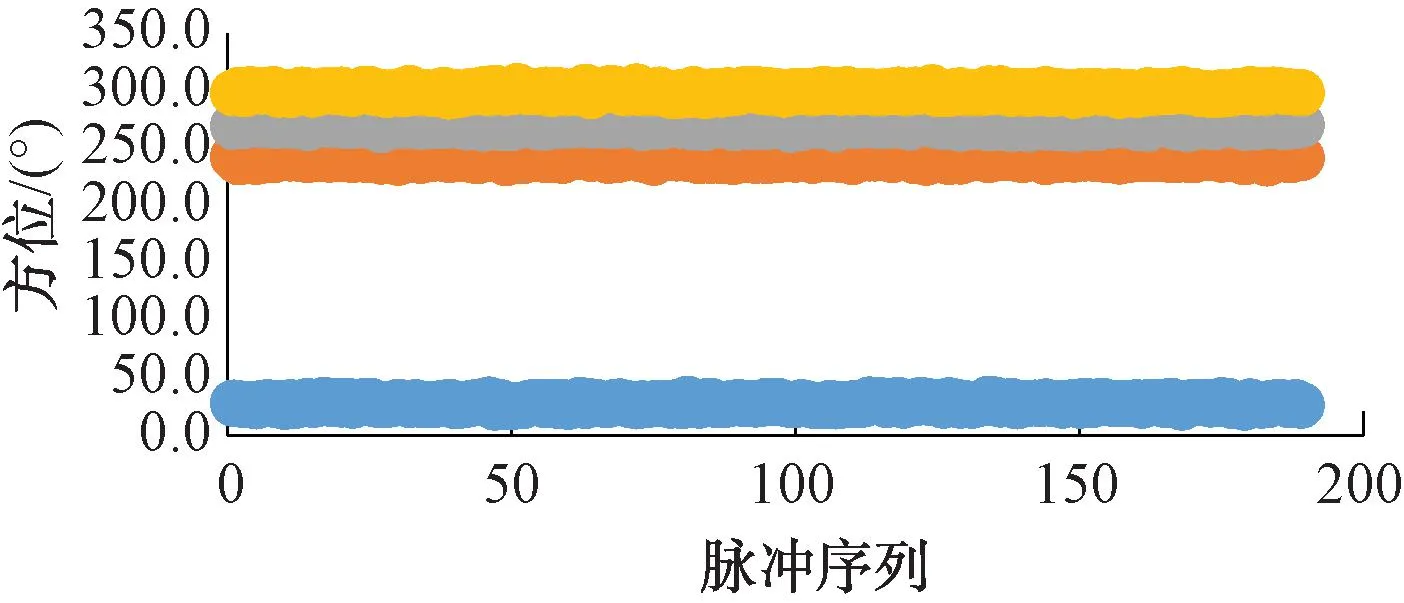
图9 主信号和反射信号脉冲幅度态势图
导弹向编队30°入射情况下,将基于该舰的仿真脉冲数据进行信号分选以验证去反射算法的效能,图10为20 s时间内每个观察窗分选结果中信号的批号(每个批号代表1个信号,不同批号代表不同信号)。

图10 64号舰20 s脉冲数据每个观窗信号分选
从64号船(图10)的每个观窗的分选信号批号可知,全分选过程存在观察窗3种情况,其一为只有主信号输出的情况,说明此时反射信号都被抑制,达到去反射的效果。其二为主信号和反射信号同时存在的情况,说明此时反射信号未被去掉,原因在于此时的主信号和反射信号虽然同步性较好,但反射信号功率较大,基本和主信号一样,同时信号的连续好,参数稳定,按当前的算法无法将该反射信号去掉。其三为没有主信号,只有反射信号的情况,原因在于此时的主信号被污染,连续性不好,参数测量不稳定,在去反射时,去掉了主信号,保留了反射信号。因此,该态势下,绝大多数处理窗的反射信号都被抑制,同时也存在部分处理窗无法做到去反射的效果。
从52号舰(图11)每个观窗的分选信号批号可知,全分选过程存在4种情况,其一为只有主信号输出的情况,说明此时反射信号都被抑制,达到去反射的效果,且该种情况在时间上占比较高,说明在多数处理窗中,算法都能做到去反射的效果。其二为主信号和反射信号同时存在的情况,说明此时反射信号未被去掉,原因在于此时的主信号受干扰较大,截获不稳定,而此时的反射信号截获稳定,连续性较好,按当前的算法无法将该反射信号去掉。其三为没有主信号只有反射信号的情况,原因在于此时的主信号被污染严重,主信号无法分选成信号,分选只有反射信号,在主信号不存在的情况下,反射信号无法去除。其四为没有主信号只有反射信号且反射信号不全的情况,在主信号被污染严重的前提下,主信号无法分选。因此,该态势下,绝大多数处理窗的反射信号都被抑制,同时也存在部分处理窗无法做到去反射的效果。

图11 52号舰20 s脉冲数据每个观窗信号分选
3.2 多舰联合去反射效果
导弹向编队30°入射情况下,将62号舰作为主舰进行联合去反射算法验证,即将53号舰、63号舰、73号舰、64号舰以及62号舰本舰处理窗的分选结果汇聚到62号舰进行多舰联合去反射算法处理。
对单舰汇入的数据采用滑窗处理,100 ms为1个处理窗,处理前1 s的数据(下同),则统计20 s每窗的联合去反射结果,分选结果唯一,如图12所示,其批号为30号舰主信号的分选结果。说明通过多舰联合去反射算法,全过程中能够将反射信号去除,保留主信号,如图13所示,同时算法会将相同的辐射源合并为一个信号输出。因此,该态势下,能够通过多舰联合去反射算法将反射信号去掉,进而达到抑制反射信号的效果。
图12 多舰联合去反射每个观察窗的分选信号批号
图13 多舰联合去反射每个观察窗的分选信号批号
导弹向编队60°入射情况下,将52号舰作为主舰进行联合去反射算法验证,即将43号舰、53号舰、63号舰、54号舰以及52号舰本舰处理窗的分选结果汇聚到52号舰进行多舰联合去反射算法处理。
统计20 s每窗的联合去反射结果,从统计结果看,多舰去反射在处理时间窗中占多数,证明大概率情况下,多舰联合去反射算法有效。该态势下,通过多舰联合去反射算法,能够大大改善信号增批的现象。
根据上文所述,对于单舰平台,在反射信号较少的情况下,反射增批抑制较好;随着发射信号的增加,反射增批抑制的效果较差。采用本文所提出的反射增批抑制技术,有效缓解单舰平台难以区分直达波或者反射波的问题,反射增批抑制的效果有较大改善。如果平台能够获取到相邻无人舰船具体的位置信息,更有利于去除发射增批的情况,更容易正确获得反舰导弹的来袭方向。
4 结束语
针对作战过程时采用密集编队阵形的作战特点,将无人舰船编队看成一个有机整体,通过协同侦察的方式,将编队每艘无人舰船的雷达侦察信息进行融合处理,通过反增批抑制技术,有效降低编队间的反射增批率,提升干扰发射引导的准确度。
