一种宽带大孔径相控阵波控优化设计
2024-03-27王亚涛
王亚涛,余 贤,王 浩
(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
0 引 言
用于电子对抗系统的相控阵天线具有空间大功率合成、方向性捷变、高可靠性等优点[1]。为满足逐步增长的使用要求,系统对天线的阵面口径和瞬时带宽需求也越来越高,此时孔径渡越时间引发的影响将不可忽略[2-3]。针对基于移相单元的波控网络已无法满足使用需求的问题,目前主流的波控网络实现方式和局限性如下:
(1) 宽带接收信道化:采用不同信道频段内信号根据主波束的偏移量进行修正[1]。此方式仅针对接收阵列,可接收空间中工作频带内所有信号,再进行分信道合成,在收发相控阵设计中使用此方式将导致设备量激增和效能下降。
(2) 实时模拟延迟[4-5]:通过在阵列各天线单元或子阵之间采用实时延迟线[6]的方式补偿单元或子阵之间的空间路程差,以达到同时延展瞬时带宽和扫描角的目的[7]。但当阵列口径较大、波束宽度较窄时,此方式需要大量高性能时延器件[8],尤其是大总量、小步进延迟线,成本高且实现难度大[9-10]。
(3) 实时数字延迟[11]:针对实时模拟延迟存在的问题,采用全通道收发数字波束形成技术,使波形的幅度、频率、相位都可以通过程序精确控制[12]。但此方式硬件资源占用量大,实施成本随着通道数增多急剧增加。
以上波控网络实现方式均存在不便于工程化应用的缺点。因此本文提出一种更加有效且经济的波控设计和优化方法。
1 基于剩余法的模拟移相延迟网络
采用子阵级实时模拟延迟方案,子阵内采用相位加权补偿波程差,子阵间采用时延补偿[13],如图1所示。

图1 子阵级模拟延迟示意图
当扫描角度为θ时,第i个通道的理论移相量可表示为[14]:
(1)
式中:di表示第i个单元与参考点间距;λ表示工作波长。
各单元实际移相量由波控网络移相器和时延器决定,第i个单元的实际移相量可表示为:
pi(mi,nj)=mis0+njs1
(2)
式中:mi表示移相器控制编码;nj表示时延器控制编码;s0表示移相器步进量;s1表示时延器步进量。
子阵内移相器和子阵间时延器的控制编码取值根据剩余法[15-16]得到,以使实际移相量pi接近理论需求值,实现期望的波束指向。
2 多级模拟延迟网络
2.1 时延步进量优化
针对时延器难以在较低的成本下同时实现高精度小步进和大时延总量的问题,该设计提出使用大步进时延器件实现实时延迟补偿的方案,优化步进量的方法如下:
(1) 由式(1)以最低频点、最小扫描角计算相邻子阵延迟量差值,作为式(2)中时延器步进量s1的初值sf1;
(2) 以sf1为时延器步进量,当波束指向为θj时,基于剩余法求解阵列在任意工作带宽中心频点fj的方向性G(fj,θj);
(3) 保持波控为θj和fj时的状态,求解阵列在该工作频带边缘频点fB的方向性GB(fB,θj);
(4) 判断阵列在目标方向θj的增益损失:
ΔGj=GB(fB,θj)-G(fj,θj)
(3)
当ΔGj满足系统指标要求,则增大时延步进量s1,改变θj和fj,重复步骤(2)~(4)直至得到满足要求的步进量最大值se1。
步进量s1存在优化空间的原因是:当以最小扫描角度确定sf1时,孔径效应影响较小,使用大步进时延器可形成大于子阵物理口径的等效口径,如图2所示。
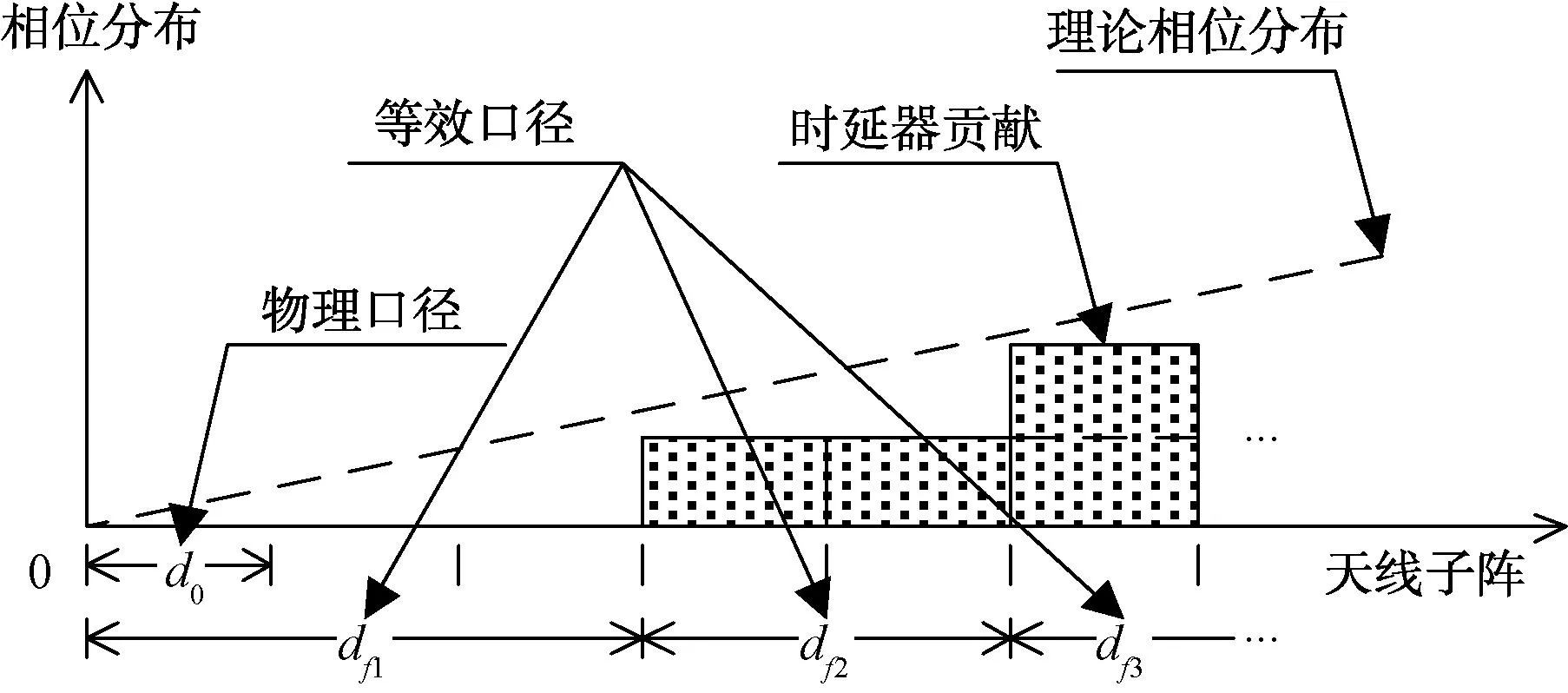
图2 阵列等效口径示意图
等效口径规模随θj和fj变化,通过在小角度扫描状态下舍弃部分过量的带宽性能,为步进量s1换取优化空间。
2.2 多级时延网络优化
针对大型相控阵列高时延总量的问题,该设计提出对时延网络作合路分级处理,如图3所示。
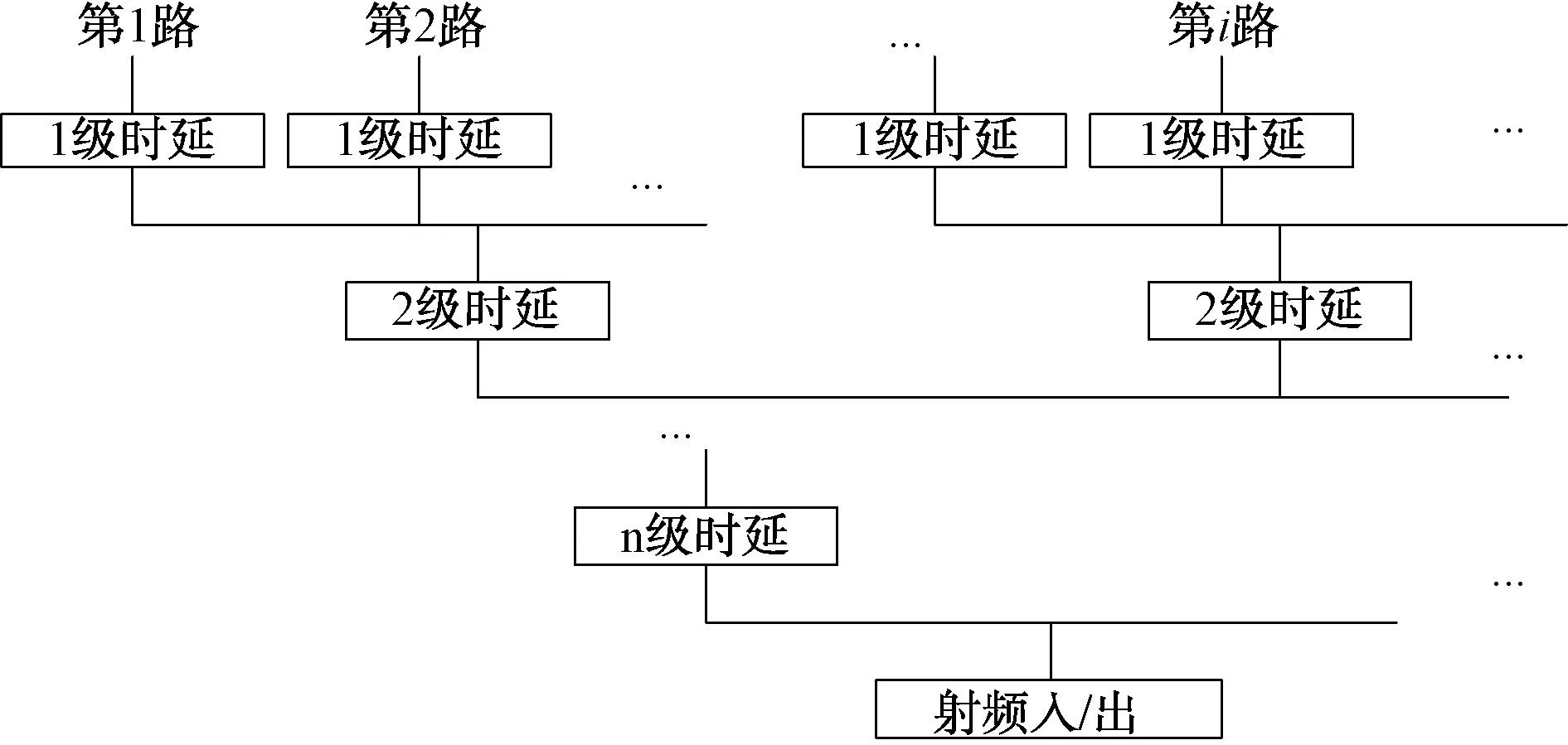
图3 多级时延网络示意图
该网络可以在保证性能的同时进一步优化增大后级时延器步进量,优化方法如下:
(1) 以2.1节优化完成的步进量s1作为时延网络步进量。以最高频点、最大扫描角计算两端子阵时延量差值,作为网络时延总量Dm。
(2) 当器件或技术能力难以实现Dm时,对延迟总量进行拆分,降低1级时延总量至可实现的D1,剩余时延需求分配至D2,Dm与D1、D2的关系可表示为:
Dm≤D1+D2
(4)
则第i个子阵的实际时延量可表示为:
Di(n1i,n2i)=n1is1+n2is2
(5)
式中:n1i表示第i个通道第1级时延器控制编码;n2i表示第i个通道第2级时延器控制编码。
(3) 以s1作为二级时延器步进量s2初值sf2,判断Di(n1i,n2i)在以剩余法计算式(2)时,能否在各扫描角度令所有通道都实现以s1为步进连续变化而无跳变。若满足要求则增大s2并重复步骤(3),直至得到满足要求的步进量最大值se2。
(4) 当D2仍然过大而难以实现时,需要对D2进一步拆分,重复步骤(2)~(3)可实现时延网络n级划分和各级步进量优化。
3 仿真验证及实施结果
基于上述优化方法,以某实际项目的大型相控阵波控网络为背景进行仿真和验证。该项目要求相控阵在10.95~14.5 GHz实现方位面扫描±10°(以0.02°为步进),瞬时带宽不小于500 MHz,方位面通道数量128个,单元间距30 mm,子阵间缝隙4 mm,考虑结构可实现、便于维护等要求,将阵面划分为8个子阵,每个子阵包含16个通道。子阵内采用移相器控制,子阵和区域间采用时延器控制。优化过程如下:
按阵列最小扫描角度θ0=0.02°,子阵间距484 mm,确定步进量初值sf1=0.56 ps;
根据系统要求ΔGj≤-0.1 dB求解得到se1=99 ps,收敛过程如图4所示,增益损失随扫描角变化关系如图5所示。
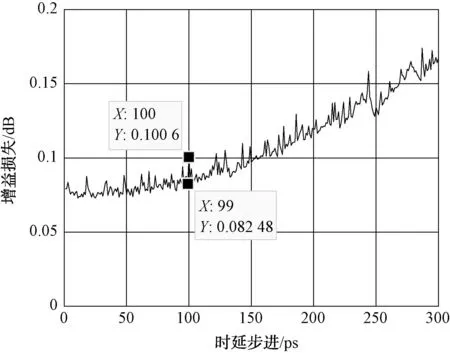
图4 收敛过程示意图
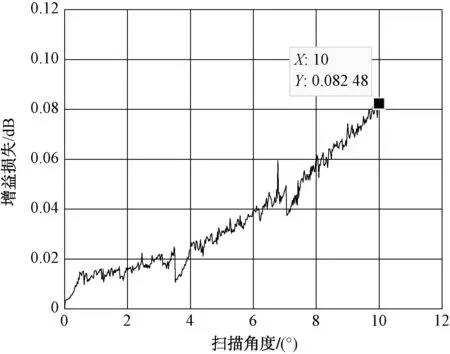
图5 增益损失随扫描角变化关系示意图
考虑性能和成本,使用2片NC12126C-218PD级联作为一级时延器1 260 ps(以10 ps为步进)。
由于一级时延不足以提供时延网络最大时延量Dm≥1 961 ps,需要进行分级处理,则二级时延器最大时延量D2m≥700 ps。
以s1=10 ps作为时延网络步进量,以D1 m=1 260 ps、D2 m≥700 ps作为一级时延和二级时延最大时延量,全态时延分布下求解得出当s2=300 ps、D2 m=900 ps时不存在跳变或过补偿。优化的波束控制网络结构如图6所示。
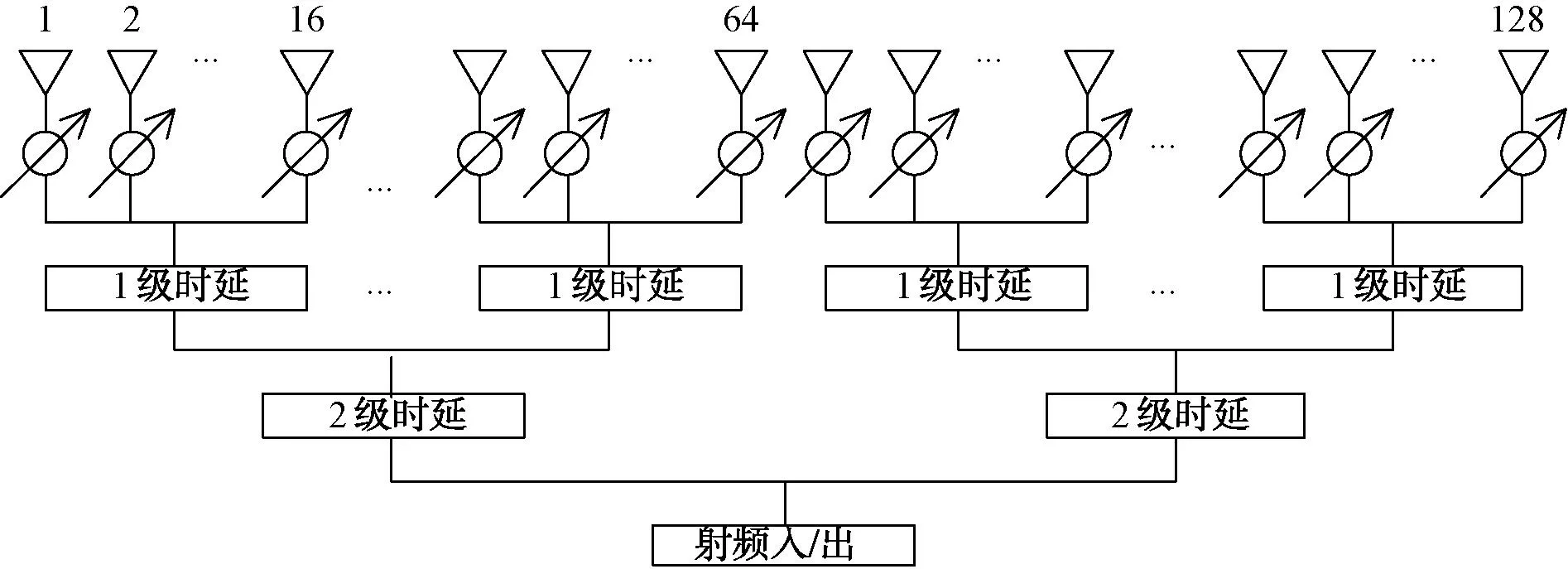
图6 优化的波束控制网络结构图
实施的相控阵实测场景如图7所示。

图7 实测场景
该相控阵实际工作状态为在500 MHz带宽内通过4个1/4阵同时工作产生多音信号,扫描范围≤±10°。测试实例以14 GHz单点读取校准表并进行波控计算,单个1/4阵的信号产生器在14~14.12 GHz产生多音信号,多频点仿真与测试实例如图8和图9所示。
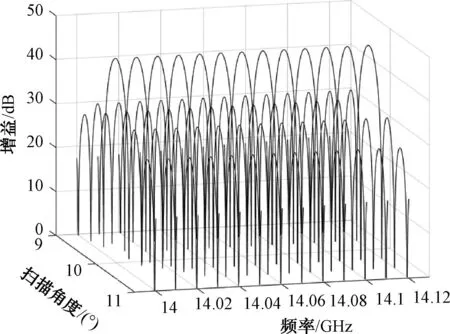
图8 多频点仿真结果

图9 多频点测试实例
可见功率电平在偏离计算频点时未出现下降趋势,其中多音信号的幅度不平坦是信号产生板卡本身和功放交调的产物,经配平可满足指标要求。
4 结束语
该优化方法在子阵级实时模拟延迟的波控架构中利用剩余法和虚位技术,求解搜索符合系统指标的时延器件参数选择范围,利用多级大步进时延网络拟合形成高吻合度的相位分布曲线,放宽波控器件指标要求。优化的波控网络第1和第2级时延器可选的最大步进量分别为150 ps和300 ps,相对于优化前的0.56 ps有效降低了实现技术难度、研发成本和控制位规模,能满足大型相控阵波束控制使用需求。