基于改进粒子群优化算法的多无人机协同欺骗干扰技术
2024-03-27刘宇蕊陈云阳
刘宇蕊,陈云阳,余 鑫
(中国船舶集团有限公司第七二三研究所,江苏 扬州 225101)
0 引 言
在现代电磁频谱作战环境中,利用多架无人机协同干扰的方式对组网雷达进行航迹欺骗已成为近年来新的作战趋势[1-2]。为了使得欺骗干扰效果显著,无人机协同产生的假目标欺骗航迹需要满足组网雷达“同源检验”的规则,这就需要对无人机的飞行任务进行合理的优化,完成航迹欺骗的同时也符合自身的飞行约束条件。多无人机协同欺骗干扰组网雷达系统问题通常为非连续、多参数以及多约束问题,故在优化时往往需要利用群体智能算法进行求解。为了有效地对组网雷达实施干扰,文献[3]根据航迹欺骗干扰原理和无人机任务特点,对无人机实施航迹欺骗干扰模型进行了简化,并给出了模型求解流程。文献[4]研究了多机协同复合干扰航路规划方法,该方法提高了在雷达组网环境下假目标航迹的可信度。文献[5]采用最优化方法建立了多无人机协同干扰组网雷达的最优控制模型,并且利用最少数量的无人机完成了对组网雷达的欺骗。
粒子群优化算法(PSO)作为群体智能算法的典型代表,由于算法本身搜索速度快且易于实现,在处理大规模优化问题时可克服传统数值求解方法求解速度慢、占用大量计算资源等问题,因而被有关学者提出并运用在实际的工程优化领域[6]。然而标准粒子群算法存在早期收敛速度过快、算法求解效率低等问题,为了得到更好的优化结果,本文在标准粒子群算法的基础上设置了随机惯性权重,增加了扰动粒子更新机制,提出了一种改进粒子群优化算法(IPSO)。利用改进后的粒子群优化算法以及标准粒子群优化算法分别对多机协同欺骗干扰数学模型进行优化,分析并比较改进粒子群算法和标准粒子群算法在优化求解多机协同干扰模型的差异性。
1 多机协同航迹欺骗干扰原理
多无人机协同航迹欺骗干扰主要考虑多架无人机对组网雷达系统的协同干扰问题,在组网雷达系统中,真实目标与有源假目标在空间状态上存在显著差异,利用组网雷达真假目标空间状态差异来识别虚假目标的方法被称为“同源检验”,它是组网雷达系统识别真假目标的理论基础[7-8]。组网雷达系统信息融合中心基于一定的“同源检验”融合规则,对接收到的多部雷达在统一坐标系下的同一空间位置上检测到的目标信号,判断其是否为一个合理的目标航迹点,多个连续的合理目标航迹点就形成了目标航迹。图1为多无人机协同对组网雷达进行航迹欺骗的示意图。

图1 多无人机协同对组网雷达航迹欺骗示意图
2 无人机航迹动力学优化问题
本文将多机协同航迹欺骗干扰抽象为无人机航迹动力学优化问题,并建立了无人机航迹优化数学模型、约束条件以及对应的目标优化函数。本文假设组网雷达系统共有5部雷达,每部雷达的数据更新率为10 s,并规定只要3部或3部以上雷达检测到的航迹点状态信息在统一的坐标系中一致,则融合中心便认为该航迹点合理,并假设20个连续的航迹点便能在融合中心建成一条航迹。
2.1 模型假设
假设一:无人机的雷达散射截面积较小且具有较强的隐身能力,被组网雷达系统检测到的概率可以忽略,并且同一时刻1架无人机只能干扰1部雷达。
假设二:无人机的飞行速度、飞行高度、最大加速度、转弯半径以及无人机间距均控制在合理的范围内。
假设三:组网雷达系统中各部雷达的最大作用距离均为150 km,无人机进行航迹欺骗时需产生1条预先设定的干扰航迹,并且干扰总时长假定为200 s。
2.2 数学模型
图2为无人机产生欺骗干扰航迹的数学模型示意图,根据“同源检验”要求,虚假航迹上的每个点处均有至少3条雷达—无人机延长线相交。当虚假航迹点与其对应的3部雷达确定时,若无人机的飞行高度已知,则可根据几何关系计算无人机在统一空间坐标下的位置坐标。

图2 无人机产生欺骗干扰航迹数学模型示意图
2.3 约束条件及目标函数
(1) 无人机飞行速度v、高度h满足:120≤v≤180 km/h,2 000 m≤h≤2 500 m;

综上所述,本文建立的多无人机协同航迹欺骗目标优化函数如下:
(1)
3 改进粒子群优化算法及模型求解
3.1 标准粒子群优化算法
标准粒子群优化算法源于对鸟群捕食行为的研究,对于每个目标函数优化的解都被看作为解空间中的一个粒子,在寻优过程中每个粒子都能得出一个优化问题解。假设xi=(xi1,xi2…,xiD)为第i个粒子(i=1,2,…,N)的D维位置参数;vi=(vi1,vi2…,viD)为第i个粒子的速度参量;pi=(pi1,pi2…,piD)为第i个粒子在空间中单独搜寻的最优解;pg=(pg1,pg2…,pgD)为所有粒子在空间中搜寻到的最优解;粒子更新速度和位置参数如下:
vid(t+1)=ωvid(t)+c1r1(pid-xid(t))+
c2r2(pgd-xid(t))
(2)
xid(t+1)=xid(t)+vid(t+1)
(3)
式中:ω为惯性权值;i=1,2,…,N;d=1,2,…,D;t表示当前迭代的次数;r1和r2均为介于(0,1)的随机数;c1和c2称为学习因子。
3.2 改进粒子群优化算法
(1) 设置随机惯性权重
由式(2)可知:标准粒子群优化算法中的惯性权重在整个迭代过程中其值通常保持不变。若该参数设置过小,则会导致在算法前期不利于全局搜索,减少了种群的多样性;若该参数设置过大,则会导致算法后期不利于局部探索,从而降低收敛速度。本文对固定惯性权重作了改进,设置了随机惯性权重,不仅能够加强算法前期的局部搜索能力,还能避免算法在迭代后期全局搜索能力不足。具体公式定义如下:
ω=ωmin+(ωmax-ωmin)ε1+με2
(4)
式中:ωmin与ωmax分别为随机惯性权重的最小值和最大值;ε1为介于(0,1)均匀分布的随机数;ε2为正态分布的随机值;μ为符合扰动项的标准差,用来度量随机变量权重ω与其数学期望之间的偏离程度。
(2) 增加扰动粒子更新机制
在标准粒子群优化算法迭代过程中,由于每个粒子只共享种群中最优粒子的信息,这种共享机制会使算法陷入局部收敛,不利于粒子在后期进行大范围的搜索。针对上述问题,本文在标准粒子群优化算法的基础上增加了扰动粒子更新机制,以保持种群的多样性,使得粒子在移动方向上增加了更多的可能性,从而扩大了粒子的寻优空间。增加扰动粒子的速度更新公式如下:
vid(t+1)=ωvid(t)+c1r1(pid-xid(t))+
c2r2(pgd-xid(t))+c3(r3-0.5)
(5)
式中:ω为惯性权重,其值由式(4)表示;c1和c2为学习因子,c3为扰动因子;r1和r2均为介于(0,1)的随机数;r3为介于(-1,1)的均匀分布随机数。
3.3 基于改进粒子群优化算法的求解步骤
利用改进粒子群优化算法对多机协同欺骗干扰模型进行求解的步骤如图3所示。

图3 基于改进粒子群优化算法求解步骤流程图
4 仿真结果与分析
4.1 仿真实验参数设置
本文的仿真实验环境为Matlab R2018b,假设某组网雷达系统5部雷达的空间位置坐标分别为:R1(80,0,0),R2(30,60,0),R3(55,110,0),R4(105,110,0),R5(130,60,0)(单位:km)。利用首点迭代法[9]产生1条虚假航迹如图4所示,其中假目标初始位置坐标为(60 600 m,69 982 m,7 995 m)。假定无人机编队数量为9架,取Δt=10 s,T=200 s,即组网雷达探测时间间隔为10 s,无人机飞行时间为200 s。2种算法初始参数具体设置如下。

图4 预设假目标欺骗轨迹示意图
粒子群优化算法求解的初始参数设置为:迭代次数N=100,种群数量M=50,欺骗航迹条数L=20,惯性权重ω=1.2,学习因子c1=c2=2。
改进粒子群优化算法求解的初始参数设置为:迭代次数N=100,种群数量M=50,欺骗航迹条数L=20,随机惯性权重ωmin=0.6、ωmax=1.5,学习因子c1=c2=2,扰动因子c3=0.2。
4.2 仿真实验结果
利用粒子群优化算法以及改进粒子群优化算法分别对多机协同欺骗干扰模型进行优化,仿真结果表明:在初始设定欺骗航迹条数L=20的条件下,利用9架无人机对组网雷达进行航迹欺骗干扰,2种算法优化的结果均能产生4条虚假航迹,2种算法优化产生的假目标航迹以及对应算法的适应度值收敛曲线见图5~图8。其中算法适应度收敛曲线横坐标表示该算法优化时的迭代次数,纵坐标表示该算法优化求解模型过程中最多航迹欺骗条数的变化。
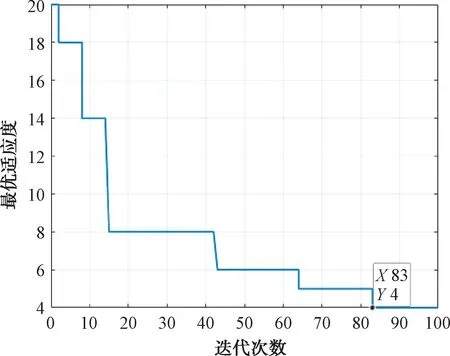
图5 粒子群算法适应度值收敛曲线
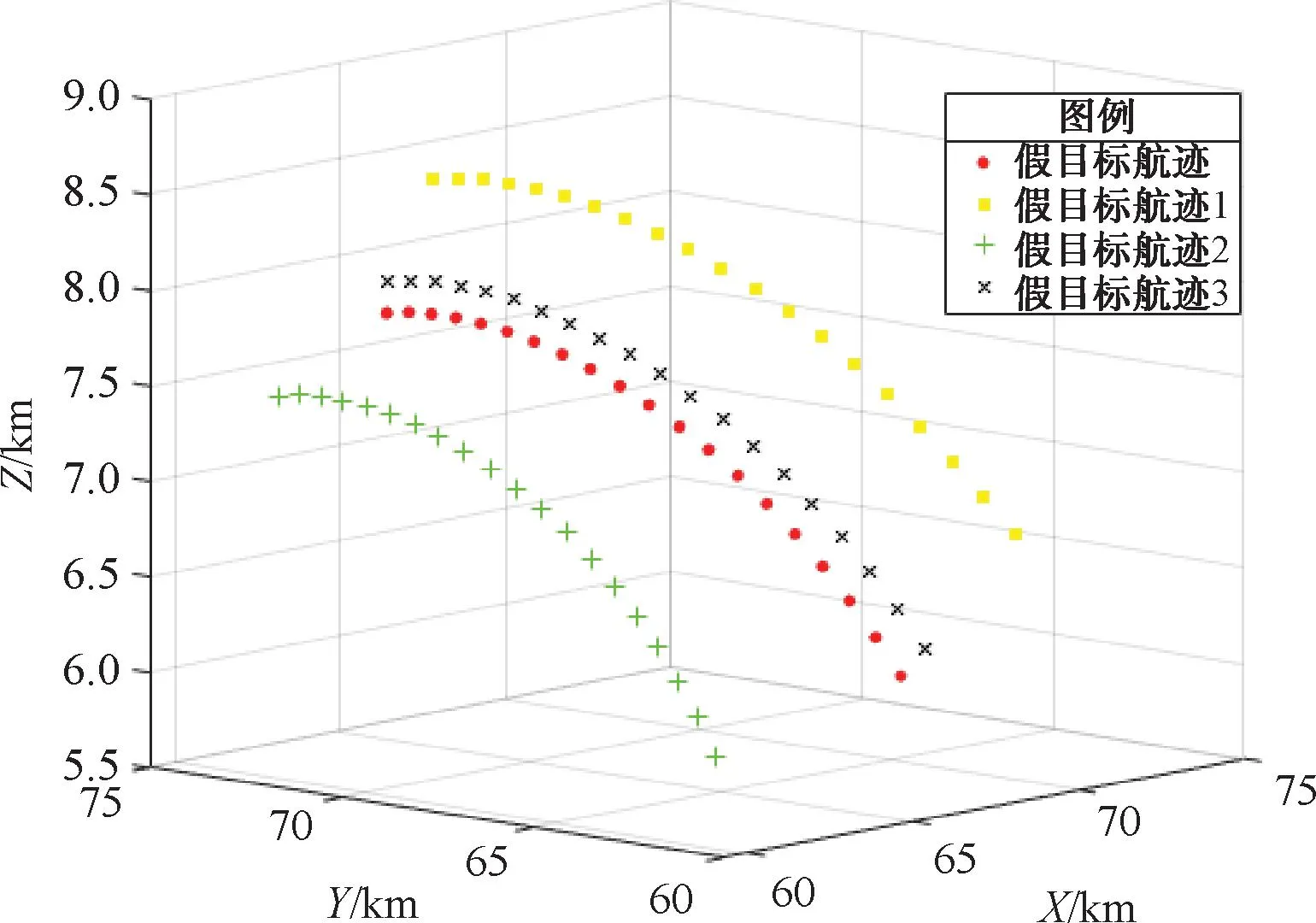
图6 粒子群算法产生假目标航迹图
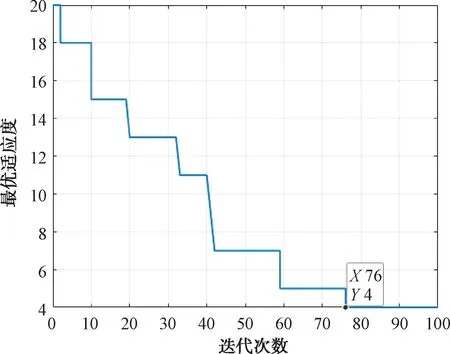
图7 改进粒子群算法适应度值收敛曲线
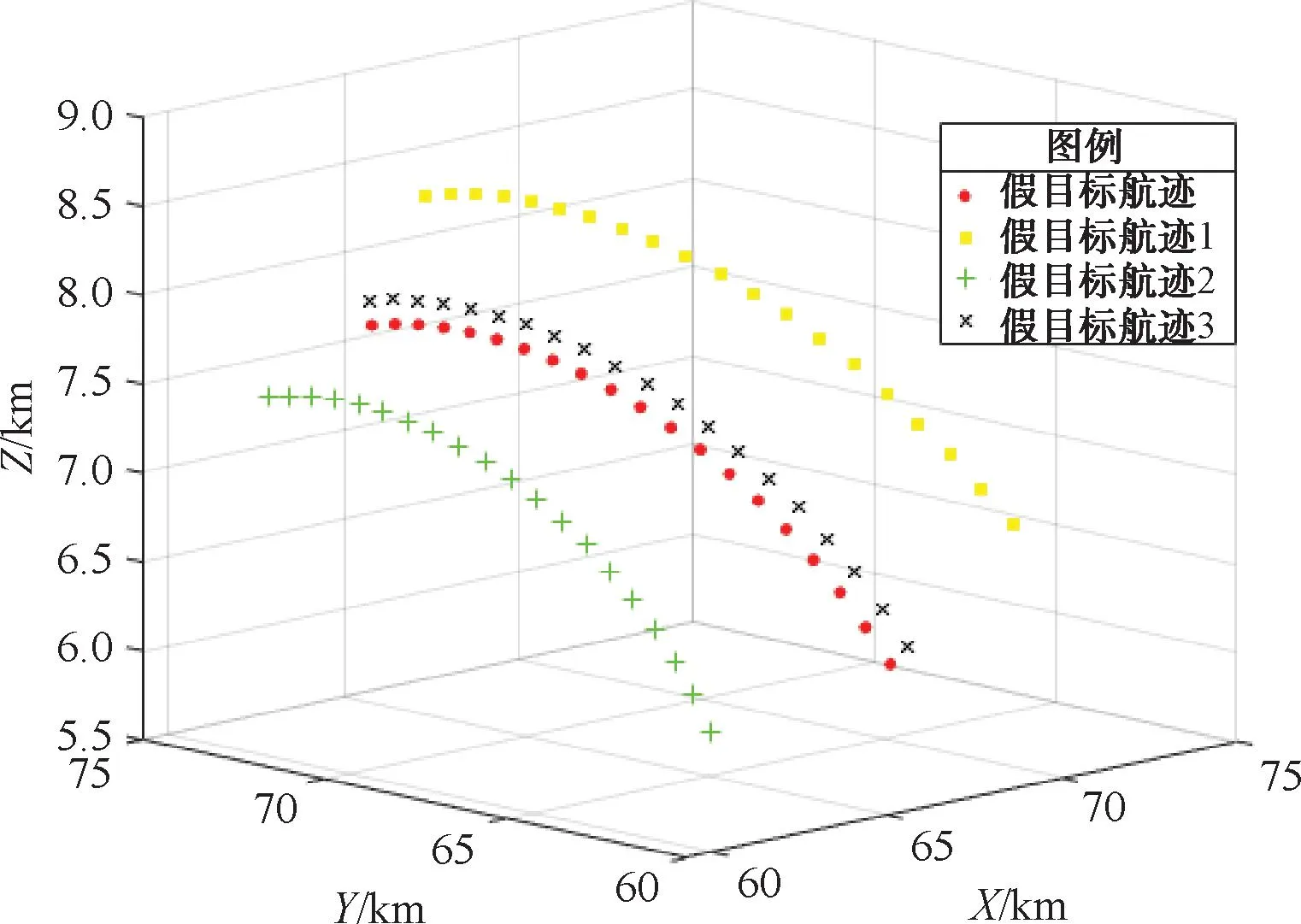
图8 改进粒子群算法产生假目标航迹图
4.3 算法分析与评价
(1) 算法效率
采用2种算法对多机协同欺骗干扰模型进行优化求解的平均执行时间以及最大迭代次数如表1所示。由此可以得出,2种算法效率为:IPSO>PSO。
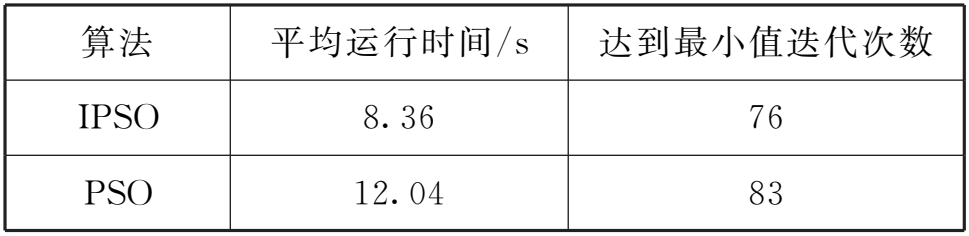
表1 2种算法运行效率对比
(2) 算法全局寻优能力
改变无人机编队的数量,利用2种算法求解在不同无人机架数的条件下各自算法的最优适应度值,结果如图9所示。由此可知:改进后的粒子群算法在处理大规模优化问题时,不容易陷入局部最优,能表现出较好的全局搜索能力。
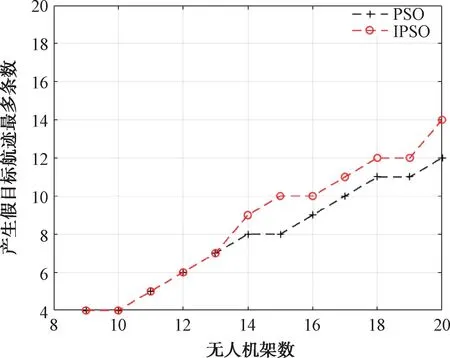
图9 2种算法在不同无人机数量下的最优适应度值
5 结束语
多无人机协同航迹欺骗干扰组网雷达系统需要考虑组网雷达系统“同源检测”规则,属于大规模优化问题,通常需要采用群体智能算法对无人机的飞行任务进行优化。针对标准粒子群优化算法对该类问题求解时存在算法效率低、容易陷入局部最优等问题,本文提出了一种基于改进粒子群优化算法的多无人机协同干扰技术,通过仿真实验验证了改进粒子群优化算法相较于标准粒子群优化算法具备更快的收敛速度和全局寻优能力,对于利用无人机对组网雷达进行协同干扰具有一定的参考价值。