基于高分辨一维距离像及其特征的空间目标识别效果分析*
2024-03-26韩晓磊张延鑫
王 放,韩晓磊,张延鑫
(北京跟踪与通信技术研究所,北京 100094)
0 引 言
随着人类航天技术的发展进步,争夺进出空间、利用空间和控制空间的自由权已成为世界大国实现国家安全和利益拓展的基本战略,而空间态势感知能力则是遂行此战略的基础和保证。空间目标是指分布于轨道高度100 km以上空间的、长期在轨的人造目标,包括工作卫星、空间站等工作航天器和失效卫星、箭体、碎片等太空垃圾。对空间目标尤其是在轨航天器的准确识别,是太空态势感知的重要内容和基础,受到了广泛关注[1-8]。通常情况下,对空间目标身份的识别主要依靠目标轨道匹配,但当目标变轨或新目标发现等轨道匹配失效的情况下,需要根据目标光、电特性实现对目标身份的准确识别。目标高分辨一维距离像(High Resolution Range Profile,HRRP)是一种相对易于获取和处理的目标宽带雷达特性数据,其中包含了丰富的目标尺寸、结构等物理特征,已在各类雷达目标识别中得到了较好的应用。研究发现,目标的HRRP在空间目标个体自动识别中有着良好的应用前景。然而,前期的相关研究多集中于基于HRRP的目标识别算法[7-12],相关结论多是基于仿真数据或少量类别(几类)的前提下得到的,与工程应用的实际情况有较大差距,缺乏对HRRP在空间目标个体识别中工程效果的可靠分析。为解决这一问题,本文在对空间目标识别问题特点分析的基础上,基于地基雷达获取的大量实测HRRP数据,对HRRP及其特征(组合)的可分性和在空间目标个体识别中的应用效果进行了量化分析,分析结果可为后续基于HRRP的空间目标个体识别技术研究和工程应用提供可靠依据。
1 空间目标识别问题分析
目标识别的本质是利用所获取的目标特征信息,通过一定的数学方法,建立待识别目标与已知目标间的关联性,包括学习和识别两个基本过程,其关键在于已知目标特征描述的建立、待识别目标特征的提取,以及识别算法和判决规则的建立。空间目标识别作为目标识别的一个分支,虽然在基本原理、方法和关键问题等方面与一般目标识别是相通的,然而由于待识别对象和应用需求的特殊性,空间目标识别又有其自身的鲜明特点和独特解决思路。
1.1 空间目标识别的内涵
空间目标识别是太空态势感知的重要内容,其具体内涵是:综合利用所获取的反映空间目标本质的各种特征和信息,如目标轨道、几何及结构特征、光学散射/辐射特性、电磁散射辐射特性等,实现对空间目标类别、身份、属性及威胁的判别,以确定目标是什么、是谁、干什么和重要性。因此,空间目标识别可分为以下3个不同层次:
1)空间目标分类,即将在轨姿控正常航天器与姿控失效航天器、箭体、碎片等太空垃圾区分开来。
2)空间目标身份识别,即主要针对姿控正常航天器,识别其身份属性,确定其具体是哪一颗卫星。
3)空间目标精细特征刻画,即利用测得的目标多源数据和情报信息,得到目标几何尺寸、结构布局、材质分布、载荷类型及能力等精细物理特征。
1.2 空间目标识别的特点
根据前述对空间目标特性的分析可知,与飞机、舰船等常规目标识别相比,空间目标识别问题具有以下特点:
1) 待识别目标运动符合轨道运动规律,其轨道特征具有较好的稳定性和时空可分性,是完成绝大多数空间目标识别的基础。
2)与飞机、舰船等目标相比,空间目标位置具有较强的长期可预测性,对同一目标可多次重复探测,且探测数据在时间和空间上易关联。因而,一方面可通过重复观测获取已知空间目标建库所需的目标特征模板;另一方面可重复多次获取待识别目标的特征信息,进行多次识别和基于多源信息的融合识别,提高识别结果的正确性和可靠性。
3)相比于地面、海面等环境,空间目标所处的太空环境背景相对简单、纯净,有利于目标识别处理。
4)与飞机、舰船、车辆等常规目标识别相比,待识别目标数量和类别巨大,给识别带来困难。
5)由于不断发生进入、变轨、陨落、解体及爆炸、碰撞等空间事件,空间目标的数量、状态、特征属性等有可能发生较大变化,因此对空间目标尤其是航天器的识别需在一个较长时间内定期重复进行,以确保对目标情况的及时、准确掌握。
2 基于HRRP的空间目标个体识别效果分析
空间目标的HRRP是目标强散射中心在雷达视线上的投影(图1),与目标窄带雷达散射截面(Radar Cross Section,RCS)序列相比,包含更多的目标信息,可直接用于空间目标个体识别。为研究HRRP直接用于空间目标识别的效果,本文利用实测获取的30类在轨卫星目标的宽带雷达回波数据,构建了目标识别模板库,基于模板匹配[13]方法进行了识别处理,并对处理结果进行了统计分析。
2.1 模板库构建
在相同的待识别目标数据质量条件下,库内模板数据的质量越高、覆盖越全面,最终识别结果的正确率和置信度将越高;与此同时,库内模板规模的大小将大大影响模板匹配识别算法效率的高低。因此,从空间目标HRRP特点出发,综合考虑算法效率等因素,采用以下策略建立了识别模板库:综合考虑现有宽带数据采样频率、空间目标与雷达视线相对转速以及HRRP的姿态敏感特性等因素,每隔30个回波抽取1个HRRP作为模板;对于相同观测条件的目标数据,选取信噪比(Signal-to-Noise Ratio,SNR)最高的数据构建识别模板。
新教材的改变对教师角色的自身定位是一项巨大的挑战。知识的易接触性意味着教师将不再是其唯一持有者,在单独的字音教学环节,教师与学生只是资源共享关系。因此如何发挥教师的引导作用才是值得深思的问题。教师应首先明确自身优势,引导学生将社会经验回归书本,将生活实际抽象概括,得出最终结论。
2.2 基于HRRP的空间目标个体识别效果
为验证HRRP在空间目标个体识别的效果,利用采集的30类在轨卫星目标的实测宽带雷达数据,对测试数据与模板数据段相同且回波编号相同、测试数据与模板数据段相同但回波编号不同,以及测试数据与模板数据段不同等3种情况进行了测试,并对识别结果正确率进行了统计分析,如表1所示。其中,测试数据与模板数据段相同且回波编号不同条件下的测试主要用于测试识别方法的正确性;测试数据与模板数据段相同但回波编号不同情况下,测试数据与模板数据有相似的目标姿态角,模板数据对测试数据具有很好的角度覆盖性,此种情况下的测试结果可以最大程度消除模板的不完备性给识别带来的影响,客观反映不同类别目标HRRP的可分性;测试数据与模板数据段不同条件下的测试,主要用于检验模板不完备对识别效果带来的影响。
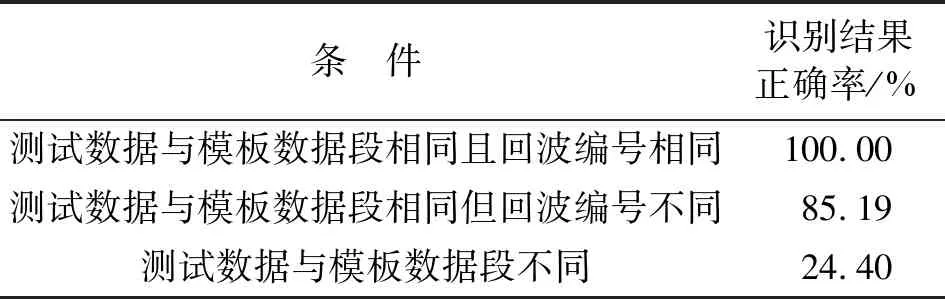
表1 基于HRRP的空间目标个体识别结果Tab.1 Space target recognition result based on HRRP
从表1中给出的识别结果统计情况可以看出:
1)在测试数据与模板数据段相同且回波编号相同条件下,识别结果正确率为100%,说明了分类器的正确性和有效性,但部分识别结果的隶属度不高,说明部分库内不同目标识别模板间存在相似度较高的情况。
2)在测试数据与模板数据段相同但回波编号不同条件下,识别结果正确率可达85.19%,识别效果较好,说明不同卫星目标的HRRP具有较好的可分性。
3)在测试数据与模板数据段不同的条件下,识别正确率仅有24.40%,说明模板完备性对识别效果影响较大。
3 基于HRRP特征(组合)的空间目标个体识别效果分析
3.1 空间目标HRRP特征分析及筛选
可提取的目标HRRP特征主要包括距离像结构特征、傅里叶-梅林(Fowrier-Mellin)变换特征、高阶谱特征、中心矩特征和统计量特征等。下面对空间目标HRRP的不同特征量的特点进行分析。
从空间目标HRRP中可提取的结构特征包括目标径向长度、距离域结构特性、散射对称性、散射中心数目、分散程度等。其中,目标径向长度为目标所占分辨单元的总长,是识别目标时最直观的几何形状特征;目标距离域结构特性主要指目标强散射中心位置之间的相对关系,反映了目标主要散射部位之间相对距离比例关系;散射对称性反映了目标散射截面分布的对称程度;分散程度则反映了目标的强散射部位在目标物体表面的分布关系。
3.1.2 傅里叶-梅林变换特征
对于空间目标这种非合作机动目标来说,距离像敏感于时间平移和方位角的变化,因此,在利用HRRP进行目标识别时,需要消除时间平移、尺度变化和幅度变化带来的影响。幅度变化带来的影响可以通过归一化消除,而傅里叶变换的模具有平移不变性,梅林变换的模具有的尺度不变性,因此可以通过傅里叶变换消除时移的影响,通过梅林变换消除尺度变化的影响。
3.1.3 高阶谱特征
高阶谱即信号的高阶累积量或高阶相关的多维Fourier变换。高阶谱可以克服直接对信号做傅里叶变换后取幅值来提取平移不变特征而造成的相位丢失的缺点,在得到平移不变特征的同时保留HRRP频谱相位信息,进而反映出蕴含于傅里叶变换相位信息中的信号形状信息。目前,在雷达目标目标识别中最常用到的还是高阶累积量的第一和第二个特性,即幅度和相位信息的平移不变性,在高阶谱域(而非时域或距离域)充分利用高阶谱的位移不变性去挖掘距离像中的相位信息。双谱是阶数最低的高阶谱,处理方法最简单,同时包含功率谱里没有的相位信息,与其他高阶谱相比,它的应用相对更为广泛,理论和方法也比较成熟。基于双谱的目标识别也是一个研究的热点。
3.1.4 中心矩特征
中心矩是一种简单的平移不变特征,表征了距离像波形的特征,可以反映目标的形状信息和粗略描述频谱的分布特性,常用于提取图像的平移不变特征,广泛用于HRRP自动目标识别。根据中心矩的定义可知,一阶矩是与平移有关的,二阶及高阶中心矩是以一阶矩为参考点来补偿平移量的,与平移无关。二阶中心矩描述了波形相对于均值的分布,三阶中心矩描述了波形相对于均值的对称性,四阶中心矩描述了波形的相对平坦性。更高阶矩的物理意义不直接,但也定量描述了波形的分布特性。实际用于识别时,随着阶数的增加,中心矩的数值会迅速增大,过大的数值对识别没有意义,因此文献[8]中提到了“相对幅度归一化”的特征处理方法。但是,通过实测数据检验发现,在利用中心矩特征进行空间目标识别时,归一化反而会使得两类目标的特征差异降低(特征维的所有值均分布在0~1之间),进而导致识别效果变差。此外,随着中心矩阶数的增加,信息成分与冗余成分的比值降低,说明高阶中心矩中包含的信息已经在低阶中心矩中给出,阶数越高,冗余度越大,可通过主成分分析法有效去除中心矩中的冗余,降低特征维数,同时保留数据的大部分本质信息。但考虑到工程应用对算法的高稳定性与低复杂度的要求,对于中心矩数值随阶数增加而急剧增大的问题,采取只取低维值的方法。通过对实测数据处理分析可知,中心矩的最高维数取5~8即可满足需求。
3.1.5 统计量特征
HRRP统计量特征主要包括均值、方差、偏度和峰度等。其中,偏度和峰度分别为三阶和四阶累积量零滞后时的值。偏度是衡量随机信号的概率分布偏离对称分布的程度,其值为零意味着此分布服从对称分布,否则服从非对称分布。峰度是衡量随机信号的概率分布偏离高斯分布的程度,也反映了概率分布尖峭的程度,其值为零表明此分布服从正态分布(高斯信号),其值为正表明此分布比正态分布陡峭(超高斯信号),其值为负则比正态分布要平坦(亚高斯信号)。在实际信号处理中,涉及到累积量阶数的选取问题。一般来讲,阶数越高,计算量越大,计算过程相对越复杂,因此如果能够满足要求应尽量选用阶数小的累积量。理论证明,对称分布相应的三阶累积量为零,需要采用四阶累积量;而非对称分布相应的三阶累积量不为零,因此可以采用三阶累积量。另外,某些随机过程的三阶累积量的值过小,也需要采用四阶累积量。考虑到空间目标识别问题的复杂性,采用三阶、四阶累积量这两个统计特征量。
3.2 基于HRRP特征(组合)的空间目标个体识别效果
通过对各种HRRP特征的特点和基于实测数据的初步分析,并考虑工程中的高稳定性和低复杂度要求,筛选出径向长度、散射对称性、散射中心数据、分散程度等距离像结构特征,傅里叶-梅林变换特征,双谱特征,5~8阶中心距特征,以及中心矩(5~8阶)和统计量特征的组合特征作为空间目标个体识别的备选特征。基于模板匹配算法,利用获取的30类卫星目标的实测HRRP序列数据,对上述特征在空间目标个体识别中的效果进行了仿真分析,结果如图2所示。可以看到,基于中心矩和统计量的组合特征的识别结果最优,平均识别率可达76.1%;基于距离像结构特征的识别效果次之,平均识别率为72.5%;而基于傅里叶-梅林变换特征的识别效果最差,平均识别率仅有67.5%。由此可知,中心距和统计量的组合特征在工程应用中具有更好的效果。此外,与基于HRRP的空间目标个体识别效果相比,基于HRRP特征(组合)的空间目标个体识别效果有不同程度降低,分析可能原因为,一方面是由于HRRP特征本质上是对目标HRRP的维数压缩和变换,特征提取过程中势必会损失部分目标特征信息从而导致特征的可分性降低;另一方是部分HRRP特征提取方法鲁棒性不高,受数据质量等因素影响提取的特征精度及稳定性不高,影响了识别效果。
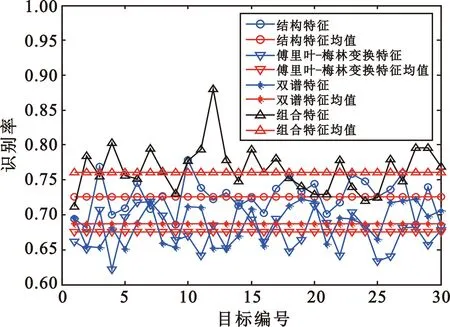
图2 基于HRRP特征的空间目标识别结果Fig.2 Space target recognition result based on HRRP features
4 结束语
本文利用地基雷达获取的多圈次、多类型卫星HRRP序列,对基于HRRP和其特征的空间目标识别效果进行了分析。结果表明,基于HRRP的识别效果远优于基于HRRP特征的识别效果,可能由特征提取过程中的信息损失和提取特征精度有限造成;基于HRRP特征的识别效率要远高于基于HRRP的识别效率,且中心距和统计量的组合特征识别效果最好;随着目标类别的进一步增多,基于HRRP的空间目标个体识别效果将进一步下降,因此后续需进一步优化模板库构建方法,并引入深度学习网络等新型分类器提升识别效果和处理效率。
