一种卫星隐蔽通信信号盲分离算法*
2024-03-26魏合文陆佩忠
王 亮,魏合文,陆佩忠
(1.中国人民解放军战略支援部队信息工程大学,郑州 450001;2.西南电子电信技术研究所上海分所,上海 200434;3.复旦大学 大数据研究院,上海 200433)
0 引 言
卫星隐蔽通信是基于卫星通信发展而来的,通过利用可视空域内的卫星转发器,在不影响原本通信业务的前提下,将低功率的隐蔽信号隐藏在卫星通信信号中。为了获得较强的安全性可抗截获能力,隐蔽信号常采用与载体信号相同或相近的传输带宽和调制参数,在时域和频域上同时实现与载体信号的混叠。在接收端使用重构干扰抵消的思想实现信号分离[1],先对载体信号进行解调,利用解调结果和参数估计结果重构载体信号,在混合信号中抵消载体信号后实现隐蔽信号接收。由于隐蔽通信不影响原有信道上的正常通信,所以载体信号可实现无误码解调。隐蔽信号的接收本质上可以看作同频混合信号的协作分离问题。
信号的分离性能主要受载体信号的抵消效果影响,而信号的参数估计精度对抵消残留噪声的大小有着决定性的影响。文献[2]针对各参数估计误差对信号抵消性能的影响开展研究,对各参数影响机制进行了分析。文献[3]则进一步给出了时延、幅度、相位估计误差联合影响下的干扰抑制比公式。文献[4]对BPSK和QPSK混合信号进行研究,得到了幅度、时延、相位的联合最大似然估计式并通过迭代算法对最优值进行搜索,这种算法的缺点是计算复杂度非常大。文献[5]基于非线性滤波的方法对信号进行预测从而降低重构抵消算法的误码率,但在信噪比较高的情况下效果并不理想。文献[6]采用独立分量分析的方法进行分离,将本地重构信号作为一路信号,与接收混合信号一起构成双通道接收条件。这种算法对接收信号的频偏、时延比较敏感,收敛性不稳定。文献[7]对信号进行同步挤压小波变换提取时频曲线,对噪声和干扰信号进行抑制从而提高解调性能。文献[8]将粒子滤波的思想引入分离算法中,对两路信号的各参数进行实时估计,由于具有对信号参数的动态追踪能力,该算法可以应用于时变信道下信号分离。然而该算法由于巨大的计算复杂度仍不具有实用性。文献[9]结合逐留存路径处理(Per-survivor Processing,PSP)算法进行信道追踪,实现了QPSK混合信号的盲分离,计算复杂度低于粒子滤波,但仍会随信号调制阶数指数级增加。文献[9]针对协作信号误码对抵消结果的影响进行分析,将处于易错区域的符号进行软信息提取,提出软信息联合修正算法降低重构抵消算法的解调误码率。以上算法均在重构抵消算法的基础上进行了改进,然而这些算法一方面由于性能缺陷并不适用于卫星隐蔽通信的信号分离,另一方面无法降低信号参数估计误差带来的性能下降,因此需要提出算法解决重构抵消算法中参数误差带来的性能下降问题。
在实际情况中,由于对信号的时延、幅度和相位的估计误差无法避免,重构抵消算法的性能始终受到限制,而且算法的计算复杂度较高。本文对参数估计误差对算法性能的影响进行具体分析,并提出基于盲均衡迭代算法的混合信号分离算法,通过对信号参数进行迭代调整降低了参数估计误差带来的性能损失。同时避免了信号的重构抵消流程,大大降低了算法的计算量。仿真结果显示,新算法能有效降低参数估计误差带来抵消残留噪声,降低了分离算法对参数估计精度的依赖程度,提高了信号抵消分离性能。
1 卫星隐蔽通信模型
卫星隐蔽通信接收信号由载体信号和隐蔽信号两部分组成,两路信号采用相同调制方式,具有相同的调制速率和载波频率,两信号在时域和频域均重叠,第三方很难检测到隐蔽信号的存在,具有很强的隐蔽性和安全性。接收的混合基带信号可表示为

(1)
式中:A1和A2分别为载体信号和隐蔽信号幅度,A1≫A2;a1,n和a2,n分别为载体信号序列和隐蔽信号序列;f1和f2分别为两信号频偏;φ1和φ2分别为两信号初始相位;g(t)为包括成型滤波器、信道滤波器以及匹配滤波器的等效滤波器;T为符号周期;n(t)为信号噪声。
2 隐蔽通信信号协作分离算法
2.1 重构抵消算法回顾
重构抵消算法的流程如图1所示,首先对载体信号进行解调和参数估计,利用解调的载体信号序列和估计参数重构载体信号,在混合信号中抵消后即可得到隐蔽信号。
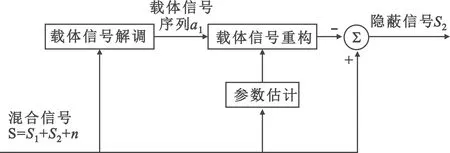
图1 重构抵消算法流程Fig.1 Flow of reconstruction cancellation algorithm
参数估计精度直接决定了最终隐蔽信号的解调性能。在对载体信号进行解调并获得载体信号序列后,载体信号的参数估计方法如下:
设以N倍过采样率对接收信号采样得到的序列为yk,由于载体信号的符号序列已知,因此对时延的估计可采用滑动相关的方法:
(2)
式中:I为用来进行相关运算的序列长度。设kmax是上式取最大值时对应的k,则接收信号起始点设置为k0=kmax-1。信号时延估计为
(3)
确定同步位置后,可用M&M[10]算法估计信号频偏f1:
(4)
(5)
(6)

(7)
完成对信号参数的估计后,利用估计结果和载体信号的符号序列即可重构载体信号波形。在混合信号波形中抵消掉载体信号波形即可得到隐蔽信号波形,解调后就实现了隐蔽信息的通信。重构抵消算法的误差主要来源于由参数估计误差引起的抵消残留噪声。当参数估计得足够准确时,不考虑信号噪声的影响,理论上可以完全无误地还原目标信号。
2.2 基于盲均衡的协作分离算法
重构抵消算法对参数估计精度依赖性很强,当参数误差较大时,对隐蔽信号的解调会受到很大的影响。此外,重构抵消算法是在信号层面上对载体信号进行抵消,对信号的重构和抵消具有较大的计算复杂度。由于两信号的传输带宽一致,因此按符号速率采样的信号包含了两信号的全部信息,理论上可以直接在符号序列层面上实现两信号的分离,这样可以大大降低算法的计算量,简化信号分离的流程。因此希望提出的算法在符号序列层面对混合信号进行分离,同时能够降低参数估计误差对最终结果的影响。
因为在卫星隐蔽通信中,隐蔽信号的存在不会影响载体信号的正常通信,因此可以认为能够对载体信号实现无误码解调,此时信号的分离性能完全由信号的参数估计精度决定。
图2为基于盲均衡的协作分离算法流程。

图2 基于盲均衡的协作分离算法流程Fig.2 Flow of collaboration separation algorithm
如图2所示,先对载体信号解调,获得载体信号序列,然后利用载体信号序列对载体信号的幅度、相位以及时延等参数进行估计,根据参数估计结果对混合信号在载体信号最佳采样点按符号速率进行采样,并进行相位补偿,得到的序列为

(8)
式中:nk为噪声。设g(t)的持续时间为LT,起止时刻分别为(1-L1)T和L2T,L=L1+L2,定义
(9)
ai,k=[ai,k-L1+1,ai,k-L1+2,…,ai,k+L2]T,i=1,2
(10)

(11)
从式(11)中可以看出,混合信号序列可以等效为载体信号序列和隐蔽信号序列分别过信道后的和。在等符号速率采样下,两信道g1和g2均为恒参信道。混合信号序列和载体信号序列都已知,因此对两个信道进行抵消后即可得到隐蔽信号序列。
引入盲均衡算法对两信道影响进行抵消,算法的输出结果可表示为
yk=wHxk-uHa1,k
(12)

盲均衡算法在对信道进行抵消时中也会引入迭代误差,同时需要一定的序列长度才能进入收敛状态,因此需要采用稳态误差小、收敛速度快而且能对相位进行修正的盲均衡算法。常数模算法(Constant Modulus Algorithm,CMA)和判决引导(Decision Directed,DD)联合盲均衡算法(CMA+DD)[11]中,CMA算法有着优秀的稳定性,能很快地使信号的眼图打开,但稳态误差大且收敛结果存在随机相位偏转,而DD算法可以提供更佳的收敛误差和更快的收敛速率,还可以对相位偏转进行修正,然而稳定性差,必须要在眼图打开后才能取得良好的均衡效果。CMA+DD算法结合了两种算法的优点,CMA算法负责快速打开眼图,DD算法则主要对算法的收敛效果做出贡献,能够满足信号分离中的应用条件。
设w=wc+wd,其中wc表示CMA均衡器,wd表示DD均衡器。wc的迭代公式为
(13)
wc(k)代表均衡器第k的迭代值,μ为CMA均衡器迭代步长,R为迭代常数,计算公式为
(14)
式中:u(n)为调制星座点。wd的迭代公式为
(15)

(16)
(17)
DD算法在符号误差较高时无法收敛,需要设置算法切换方式。对CMA均衡器迭代完成后,再次计算均衡输出结果,当CMA均衡器迭代前后输出的判决符号相同时,可以认为眼图已经打开,此时开始对DD均衡器进行迭代,从而提高均衡性能。设
(18)

新算法通过引入盲均衡算法在符号层面对信号进行分离,相较于重构抵消算法大大降低了计算复杂度,同时能够对各参数误差通过迭代进行跟踪和修正,有着更好的抗误差性能。同时,新算法流程简单,避免了信号的重构抵消步骤,简化了算法流程,易于实现。
3 性能分析
3.1 计算复杂度分析
本节以算法中复数乘法的次数为依据对两种算法的计算复杂度进行比较[9]。在重构抵消算法和本文所提算法的信号分离流程中,对载体信号的解调和对载体信号参数估计的部分都是一致,计算复杂度没有差异;主要差别体现在重构抵消算法需要对载体信号进行重构以及对隐蔽信号进行解调,而本文算法省略了这两个部分的计算,在信号分离的过程中计算复杂度均来自于盲均衡算法。
重构抵消算法中的复数乘法计算数量与符号序列长度、匹配滤波器阶数以及采样倍数等因素有关。设符号序列长度为P,采样倍数为N,匹配滤波器阶数为L,则载体信号重构以及隐蔽信号解调流程中的复数乘法计算量之和为2PN(LN+1)。在本文所提算法中,分离流程的的计算复杂度取决于盲均衡滤波器的阶数,设为nw,在本文采用CMA+DD盲均衡算法的情况下,最大计算量为16nwP。这是假设每一次算法迭代中CMA盲均衡器和DD盲均衡器都进行了更新的情况,实际上计算量会小于这个值。此外,无论是预训练部分还是分离部分,盲均衡算法并不需要对每一个符号序列都进行迭代更新,只要盲均衡滤波器完成了收敛,就可以直接输出均衡器系数,或对剩下的符号统一计算然后输出隐蔽信号序列,计算量会进一步大大降低。本文算法与重构抵消算法计算复杂度对比如表1所示。
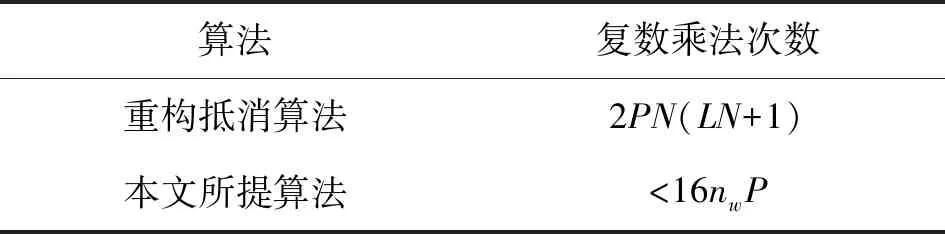
表1 本文算法与重构抵消算法计算复杂度对比Tab.1 Computation complexity comparison between the proposed algorithm and reconstruction cancellation algorithm
由分析可得,重构抵消算法的计算量与符号序列长度、采样倍数以及匹配滤波器阶数有关,而本文所提算法的计算量则取决于盲均衡滤波器阶数以及算法收敛点数(一方面算法收敛点数往往小于符号序列长度,另一方面盲均衡滤波器阶数是人为设置的),因此本文所提算法的计算量可以人为地控制在较小的范围内。在本文仿真实验中,采样倍数N=8,匹配滤波器阶数L=6,也就是根升余弦滤波器保留3个拖尾。盲均衡滤波器阶数nw=21,按照刚才分析得到的最大计算量进行对比,本文算法较重构抵消算法复数乘法的运算数量降低了一半以上。实际应用中,DD均衡器在迭代初始阶段很少参与迭代,再通过设置合适的迭代结束条件,计算量还可以变得更低。
3.2 仿真分析
3.2.1 不同时延误差下目标信号解调误码率
保持幅度和相位误差为零,因此在时延误差很小时重构抵消算法接近无误差抵消,仿真结果如图3所示。
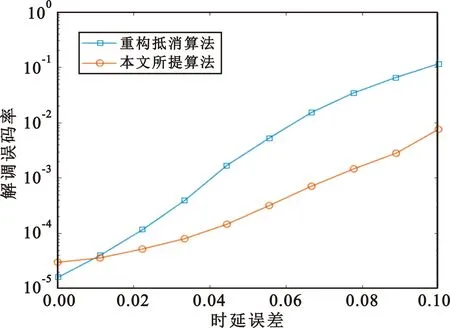
图3 不同时延误差下目标信号解调误码率Fig.3 Demodulation bit error rate of target signal under different delay errors
由图3可以看出,在时延误差很小时,重构抵消算法接近理想抵消效果,解调误码率很小。本文算法由于引入了少量均衡迭代误差,因此误码率比重构抵消法略高。当时延误差逐渐增大,产生的抵消残留噪声随之增大,重构抵消算法分离性能快速下降。本文算法借助盲均衡算法对符号畸变的抑制,误码率升高速率明显低于重构抵消算法。在归一化时延误差大于0.02时,本文算法性能就已经优于重构抵消算法。实验表明,本文所提算法能够很好地抵消时延误差对分离性能产生的影响。
3.2.2 不同幅度误差下目标信号解调误码率
实验中保持时延和相位误差为零,逐渐提高幅度误差,两种算法分离性能仿真结果如图4所示。

图4 不同幅度误差下目标信号解调误码率Fig.4 Demodulation bit error rate of target signal under different amplitude errors
从图4中可以看到,与时延误差仿真图类似,在幅度误差很小时,重构抵消算法接近无误码分离,但对幅度误差精度很敏感;随着误差增加,误码率明显提高。相比之下,本文算法能够对幅度误差进行调节,对幅度误差变化并不敏感。在幅度误差较大时,两种算法误码率已经相差一个数量级以上。
3.2.3 不同相位误差下目标信号解调误码率
保持幅度和时延误差为零,通过改变相位误差观察两种算法解调性能,仿真结果如图5所示。
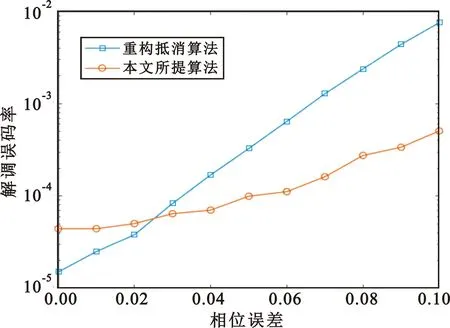
图5 不同相位误差下目标信号解调误码率Fig.5 Demodulation error rate of target signal under different phase errors
在图5中,两种算法的特性和之前两个实验相似,本文算法依然能够对相位误差进行调节,降低误差对目标信号解调的影响。相位误差大约在5π/1 000时,本文所提算法已经在分离性能上优于重构抵消算法。
综合3个实验来看,重构抵消算法性能十分依赖于参数估计精度,误码率随估计误差变化很大,而本文提出的基于盲均衡的协作分离算法能够对各参数误差进行抑制,在误差较大时可以实现一个数量级的性能提升,降低了分离算法对参数估计精度的依赖,相较重构抵消算法有更好的适用性。
4 结束语
本文针对卫星同频混合信号的协作分离中重构抵消算法受参数估计误差影响较大以及计算复杂度较高的问题,提出了基于盲均衡的协作分离新算法,在符号层完成信号的分离并对参数进行跟踪修正,降低参数误差对算法性能的影响。性能分析部分证明了相较于重构抵消算法,新算法能以更低的计算复杂度明显提升算法抗参数误差影响的能力,降低了协作分离算法对参数估计精度的依赖。此外,本文提出的算法结构简单,避免了信号的重构抵消流程,便于实现。
在下一步的研究中,将对符号速率偏移和频率偏移产生的解调误差进行分析,对算法进一步优化,拓宽该算法的应用场景。