考虑尾流效应的风电场分群综合惯性控制研究
2024-03-25温拥军
何 银,何 宇,温拥军
(1.贵州大学电气工程学院,贵州 贵阳 550025;2.浦江光远电力建设有限公司,浙江 金华 321000)
0 引言
单机等值方法将整个风电场视为一台风力涡轮机和一台发电机[1]。但对于大规模海上风电场而言,内部风电机组间距有限,其包含的几十乃至上百台机组产生的尾流在下游相互叠加,风电场内部风速空间分布极为不均。此时基于风电场单机等值模型的综合惯性控制策略会产生较大误差。针对以上问题,文献[2]和文献[3]提出按照风速将风电场进行机分类等值的方法;文献[4]提出一种基于风机桨距角动作情况的风电场动态等值建模方法;文献[5]以风电机组的转速作为分群指标。但以上文献提出的以风速、桨距角和风机转速作为分群指标的风电场动态等值建模方法,并不能准确体现风电机组进行惯性控制时的特性和能力,在此场景下不适合作为风电场分群指标。
针对上述问题,本文提出一种考虑尾流效应的风电场分群综合惯性控制策略。
1 风电场分群指标
在进行综合惯性控制时,风力发电机将系统频率作为控制信号,建立频率-有功输出关系,通过释放其转子动能来进行辅助调频,能够近似模拟同步发电机的一次调频特性和惯量特性。因此,风力发电机转子动能能够准确地反映风力发电机进行惯性控制的能力,适合作为惯性控制时的风电场分群指标。
1.1 多重尾流效应下的空间风速分布
尾流效应是指在风力发电机运行时,风流经过风机叶片后产生的连续切向漩涡,使得该风向下游区域出现剪切效应增加、湍流增加及风速大幅降低等现象[6]。Jensen尾流模型[7]认为尾流所影响的区域直径是线性扩张的。其计算尾流速度的解析方程为
(1)
式中:Vx为上游风机在下游距离x处的尾流风速;V0为来流风速;Ct为风机推力系数;R0为风机风轮半径;Rx为上游风机在下游距离x处生成的尾流半径;Soverlap为尾流影响区域面积;S0为风机风轮面积;k为尾流衰减常数;x为尾流下游区域水平距离x点处。
在大型风电场中,下游风机迎风风速会受到多个上游尾流的影响。为评估相应风机的尾流效应,Katic等[8]提出一种计算多个尾流的方法。假设风机排列规则,则风电场n行m列处风机风速Vn,m为
(2)
式中:Vij为风电场第i行j列风机产生的尾流速度;Nrow为风电场1行风机的数量;Ncol为风电场1列风机的数量。
1.2 多尾流下风机调频能力因子
风电机组用于惯性控制的有效动能如式(3)所示,包括转子动能变化量ΔED以及风能捕获的变化量ΔEp_wake[9]。
ΔEk_wake=ΔED+ΔEp_wake
(3)
(4)
式中:PD为机组极对数;JD为机组转动惯量;ω0为初始转速;ωmin为机组转速下限;ΔEp_wake为风电场机组风能捕获的变化量,其表达式为
(5)

以额定风速时的单台机组最大有效储能ΔEk_wake_max为基准,定义多重尾流下的风电机组调频能力因子Cfre_re_wake为
(6)
2 风电场动态等值的多机表征
2.1 基于多重尾流调频能力因子的多机等值
由于风电场动态等值对聚类算法运算速度要求较高。k-means算法相较于DBSCN等其他聚类算法具有运算速度快,以及不需要对算法进行联合调参等优势。轮廓系数是k-means聚类算法常用的评价指标。轮廓系数考虑内聚度与分离度2种因素[10],适用于对相同数据使用不同聚类算法或者相同数据相同聚类算法不同中心数目的聚类结论进行打分。所以选取k-means算法作为本文聚类算法,选取轮廓系数作为聚类效果打分指标。
基于多尾流机组调频能力因子的多机等值方法流程如下所述:
a.输入风电场上游风速V0计算风电机组风速分布,计算各机组调频能力因子Cfre_re_wake。
b.选取机组调频能力因子为机组分群指标,轮廓系数SC为聚类打分指标,选取k个初始聚类中心点。
c.应用k-means算法迭代计算,计算k个初始聚类中心点时轮廓系数。
d.当1-SCk<0.005时,得到k台等值发电机,否则k=k+1,重复步骤c和步骤d直至满足该条件。
2.2 多机等值的模型参数计算
假设风电场由n×m台同型号风力发电机构成,利用上述方法将风电场机组分为k个机群后,将每个机群等值为1台大型风力发电机。等值机组的各部分参数计算为
(7)
式中:m为机群机组数量;S为机组容量;P为机组有功功率;H为机组转子惯性时间常数。
3 综合惯性控制
本文提出的考虑尾流效应的风电场分群综合惯性控制结构如图1所示,该策略包含模糊自适应调频责任控制器FIS1_wake与模糊自适应综合惯性控制器FIS2_wake。FIS1_wake根据系统风电渗透率与机组调频能力因子确定调频责任系数。FIS2_wake根据系统频率变化工况动态输出综合惯性控制参数,Kf和Tf分别为高通滤波器参数和滤波器时间常数。各等值机组输出的调频功率ΔPw之和与风机功率参考值Pwref相加得到风电场总输出功率Pw。传统机组调频功率ΔPm与传统机组功率参考值Pmref之和为传统机组总输出功率Pm。PL为系统负荷。
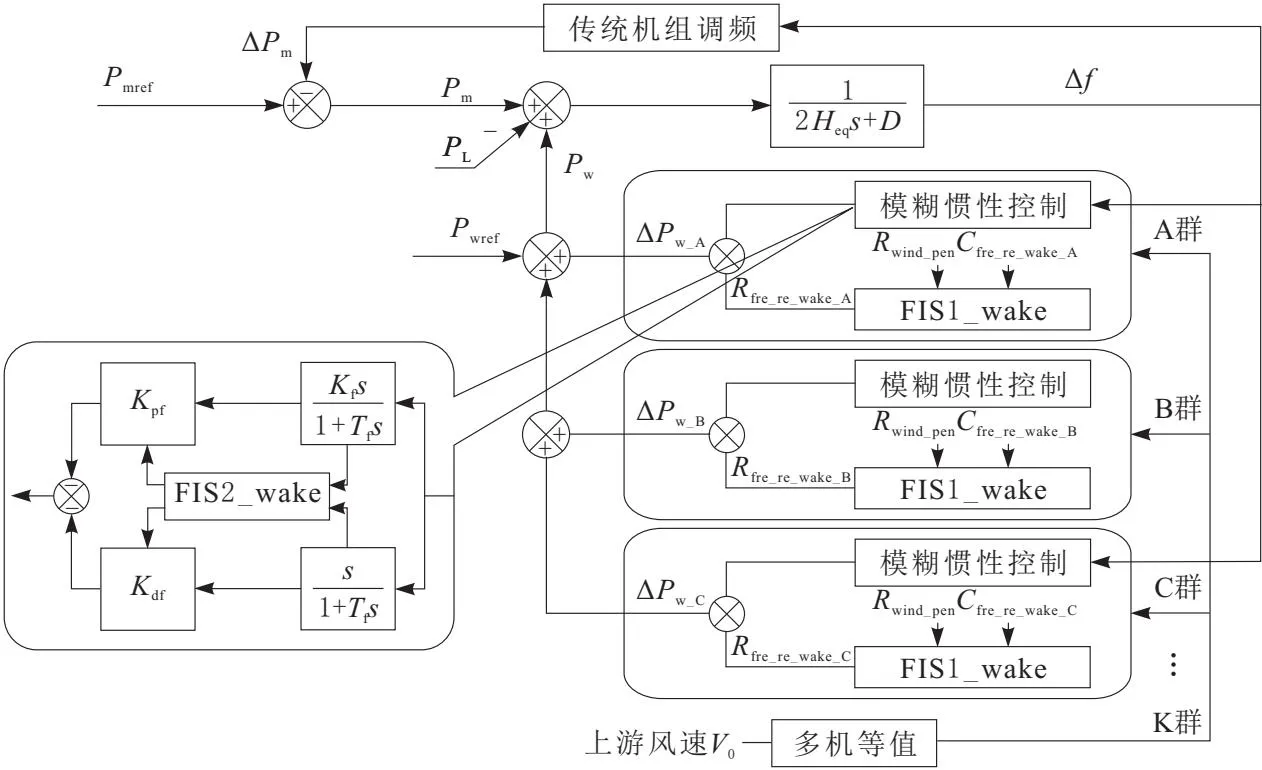
图1 考虑尾流效应的风电场分群综合惯性控制
由图1可得系统等值摆动方程为
(8)
式中:Heq为系统等效惯性常数;Δf为系统频率偏差;Pm为传统机组输出功率;Pw为风电场输出功率;PL为系统负荷;D为系统阻尼。
模糊控制器FIS1_wake输入量为地区风电渗透率Rwind_pen与多重尾流下的风电机组调频能力因子Cfre_re_wake,输出量为机组的调频责任系数Rfre_re_wake。FIS1_wake根据系统不同工况动态确定机组的调频责任系数。FIS1_wake的输入输出隶属度函数如图2所示。
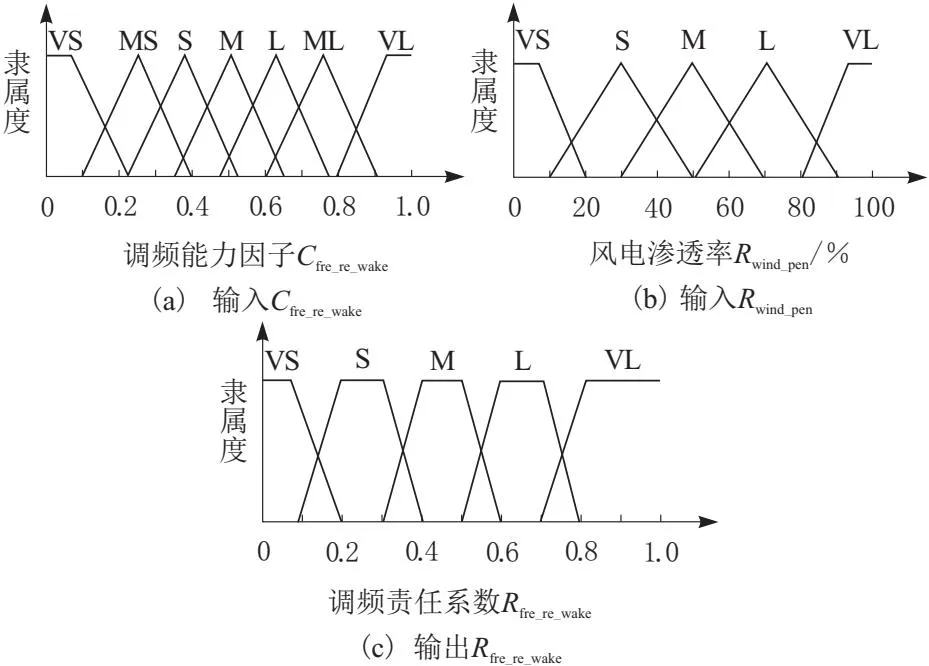
图2 FIS1_wake输入输出隶属度函数
模糊控制器FIS2_wake输入量为频率偏差Δf与频率变化率df/dt,输出量为风机惯性控制的微分系数Kdf与系数Kpf。FIS2_wake的输入输出隶属度函数如图3所示。

图3 FIS2_wake输入输出隶属度函数
根据上述2个控制器输出的3个控制系数,进而决定了系统频率响应过程中机组的出力增量,即
(9)
按照上述风电场多机等值方法获得的A,B,C,…,K台等值机组进行惯性控制时,式(9)转化为
(10)
模糊控制器FIS1_wake与模糊控制器FIS2_wake三维曲面如图4所示。

图4 FIS1_wake与FIS2_wake三维曲面
4 算例仿真与分析
假设算例风电场布局如图5所示,为规则的8行8列矩形布局,横纵间距505 m。风机切入风速Vcut_in=6.2 m/s、额定风速Vrated=10.6 m/s,单机容量S=1 MW。

图5 风电场布局
上游风速V0=10.6 m/s时,风电场风速分布如图6所示。

图6 风电场风速分布
图6形象地展示了风电场上游风速为10.6 m/s时的尾流效应。其中,锥形放射状的轮廓区域即为尾流效应影响区域,尾流影响区域与距离成正比,距离越远,尾流影响范围越大。在未受到尾流影响的区域,风速基本不衰减,为固定的10.6 m/s。
风机风速如表1所示,该表展示了风电场内每台风机所处位置的具体风速。在风电场上游风速为10.6 m/s时,经过两重尾流的影响,如(4,1)、(6,3)等机组风速已经不能达到6.2 m/s的切入风速。风电场最低风速2.706 m/s在四重尾流的影响下出现在机组(8,1)处。

表1 风机风速分布
根据当前各机组风速利用式(3)~式(6)计算其调频能力因子。具体数据如表2所示。

表2 风机调频能力因子
可见,额定风速如机组(1,1)、(1,2)等有最大有效动能储备,其调频能力因子为1.000。而如(8,1)、(8,2)等未达到切入风速6.2 m/s的风机,机组不能产生有功功率,则没有参与系统调频的能力。
以风机调频能力因子为分类指标进行机群分类,不同聚类数目的轮廓系数如图7所示。轮廓系数取值为[-1,1],该系数越接近于1说明聚类效果越好。
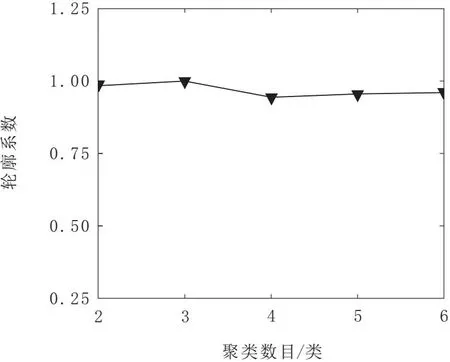
图7 不同聚类数目轮廓系数折线图
根据聚类结果,在聚类中心选取为3时,轮廓系数0.998取得最高,此时聚类效果最好,风电场机组分群情况如图8所示。
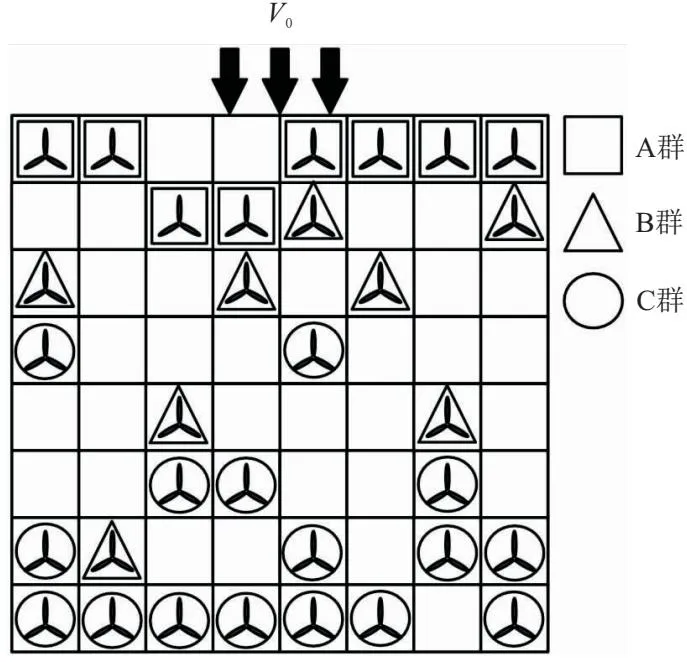
图8 风电场机组分群
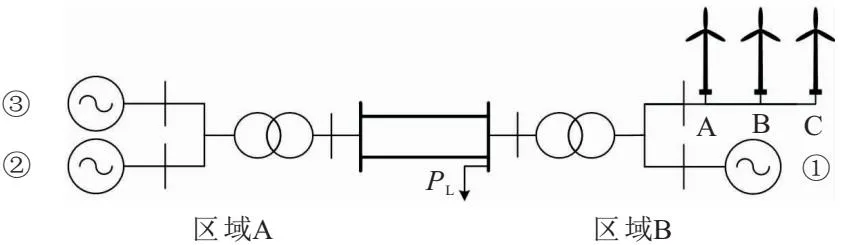
图9 等值风电场接入两区域电力系统
3个群的中心调频能力因子分别是:1.000、0.177、0,分别命名为:A、B、C。每群的风机编号为:
A[(1,1)(1,2)(1,5)(1,6)(1,7)(1,8)(2,3)(2,4)];B[(2,5)(2,8)(3,1)(3,4)(3,6)(5,3)(5,7)(7,2)];C[(4,1)(4,5)(6,3)(6,4)(6,7)(7,1)(7,5)(7,7)(7,8)(8,1) (8,2) (8,3) (8,4) (8,5) (8,6)(8,8)]。
根据以上机群分类结果,风电场将由3台机组所等值,仿真模型转为如图 9所示。
3台火电机组以及风电场A、B、C等值机组参数如表3所示。
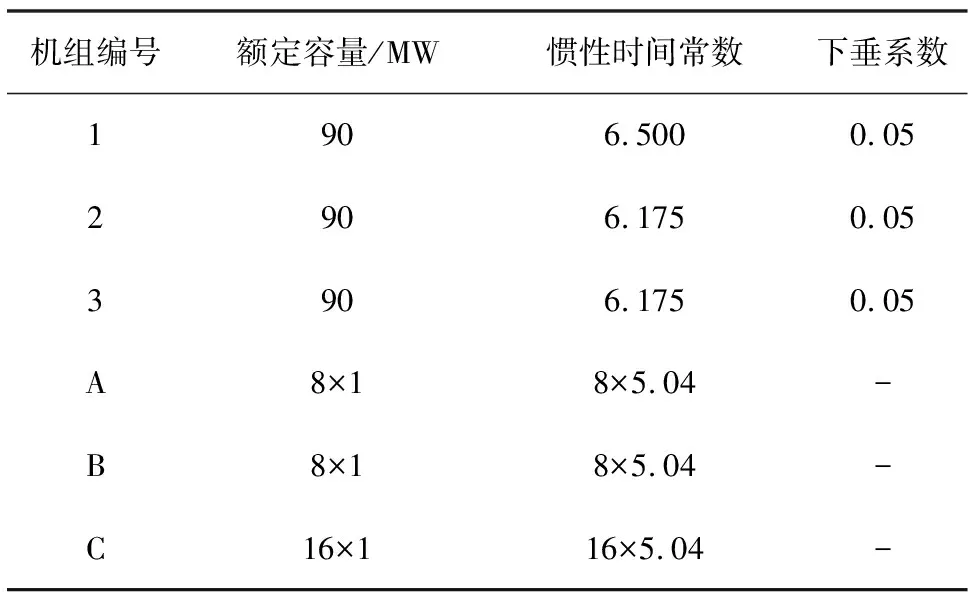
表3 风火机组参数
为验证本文提出的考虑尾流效应的风电场分群综合惯性控制策略的有效性,与传统单机等值风电场固定参数惯性控制策略[11-12](以下简称固定参数惯性控制)、附加下垂控制以及风机不参与系统调频进行仿真对比。
风电场接入两区域电力系统总负荷PL=160 MW,基准容量SB=8 MW。等值风电机组运行于最大功率追踪(maximum power point tracking,MPPT)模式下。在仿真50.00 s时,负荷突然增加12 MW、16 MW、18 MW时系统频率响应情况分别如图10a~图10c所示。

图10 负荷突增时系统频率响应
由图10可见,在3种不同负荷切入系统的情况下,本文方法对比其他方法均取得了更好的控制效果。限于篇幅原因,以下仅对切入负荷为16 MW的情况进行分析。
在50.00 s之前,系统频率处于额定值f=50.00 Hz,在50.00 s时刻,由于系统突然增加16 MW负荷,导致系统频率迅速下降,最后在70.00 s时进入新的稳态f=49.89 Hz。其中,本文方法与固定参数惯性控制、附加下垂控制以及风电场不参与调频的频率最低点与对应时刻分别为:f=49.70 Hz,t=52.91 s;f=49.68 Hz,t=53.09 s;f=49.64 Hz;t=53.12 s;f=49.60 Hz,t=53.15 s。
证明在提升系统频率最低点以及延缓系统频率最低点到来时间这2方面,本文方法均达到最好的效果。
图11为采用不同风电场等值模型进行模糊自适应综合惯性时,单机等值模型预期出力与多机等值模型实际出力的情况对比。

图11 单机等值模型预期出力与多机等值模型实际出力
单机等值模型未考虑尾流效应对风电场的影响,认为风电场32台机组风速均为风电场上游来流风速V0=10 m/s,其预期出力相当于4台A类等值机组出力情况。所以在t=50.00 s前,风电场预期稳态出力为Panti=4×0.730=2.920 pu。而考虑尾流效应的影响,风电场实际仅有A、B这2台等值机组可以出力,总和为Pact=0.908 pu。实际出力与预期出力差距ΔP=Pact-Panti=-2.012 pu。而在惯性控制功率输出峰值时刻t=51.45 s,预期峰值出力Panti_peak=2.968 pu,实际峰值出力Pact_peak=0.922 pu,而两者峰值差距为ΔP=Pact_peak-Panti_peak=-2.046 pu。证明在实际运行当中,不考虑尾流效应的风电场单机等值模型在风电场进行惯性控制时会导致不可忽视的误差。
图 12a和图12b分别是FIS2_wake综合惯性模糊控制器输出惯性控制系数Kpf与Kdf变化曲线。在t=50.00 s时,由于此时系统频率偏差Δf与df/dt均处于最大,所以Kpf与Kdf在此时输出最大。由于系统惯性与风机惯性控制,在t=50.60 s时,Δf与df/dt较负荷切入时刻均变小,所以Kpf与Kdf均有一个较小跌落。其后,经过持续的惯性支撑,在t=70.00 s系统频率进入稳态。

图12 Kpf与Kdf变化曲线
表4展示了FIS1_wake输出情况,A、B、C机组调频能力因子分别为1.000、0.177、0,系统风电渗透率为10%。其对应的调频责任系数为0.250、0.081、0。A机组虽然有最高调频能力因子,但是风电渗透率较低,所以调频责任系数不能达到较高值。而B机组调频能力因子较低,在相同风电渗透率时,其调频责任系数也更低。C机组无调频能力,其调频责任系数为0。
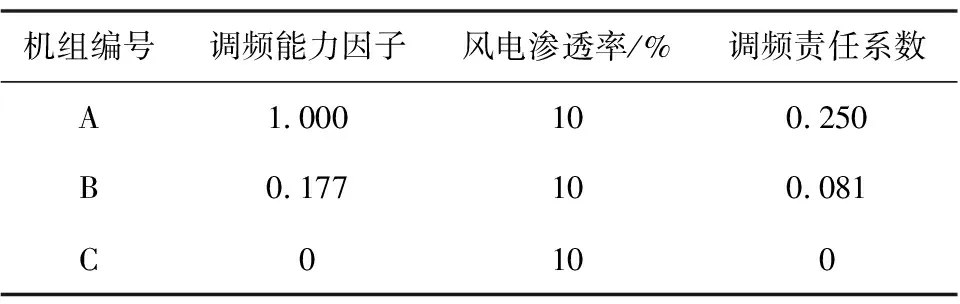
表4 等值机组调频能力因子
图13是A、B等值机组出力曲线。在t=57.20 s与t=57.30 s时,A、B等值机组出力均低于t=50.00 s前的稳态出力。本阶段为吸收能量,提高转子转速,将转速提升至未进行惯性控制前的MPPT转速,以获取最大功率。
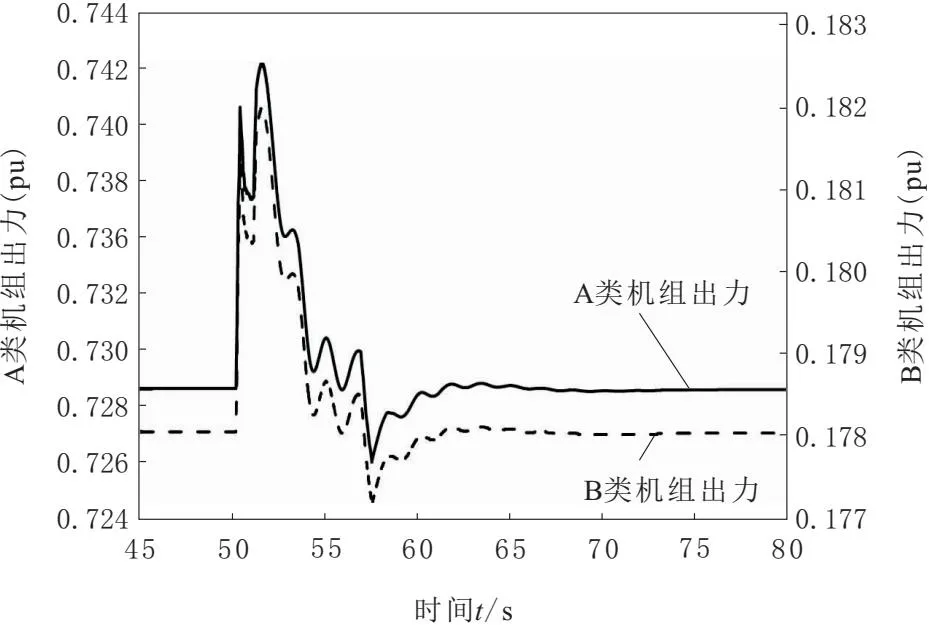
图13 等值机组A、B出力
图14展示了在进行惯性控制期间A、B等值机组转子转速变化情况,A机组初始运行速度为1.200 pu,是风机安全范围内的极限运行速度,B机组初始运行速度0.787 5 pu,转速较低,接近于风机最小转速0.700 pu。由于惯性控制系数Kpf与Kdf在负荷突增初期取得惯性控制期间最大值,所以在t=50.00~52.00 s期间,等值机组A、B转速降低最快。机组完成惯性控制后,风机缓慢加速至原MPPT运行转速,t=80.00 s时,等值机组转速基本恢复至原MPPT运行转速。
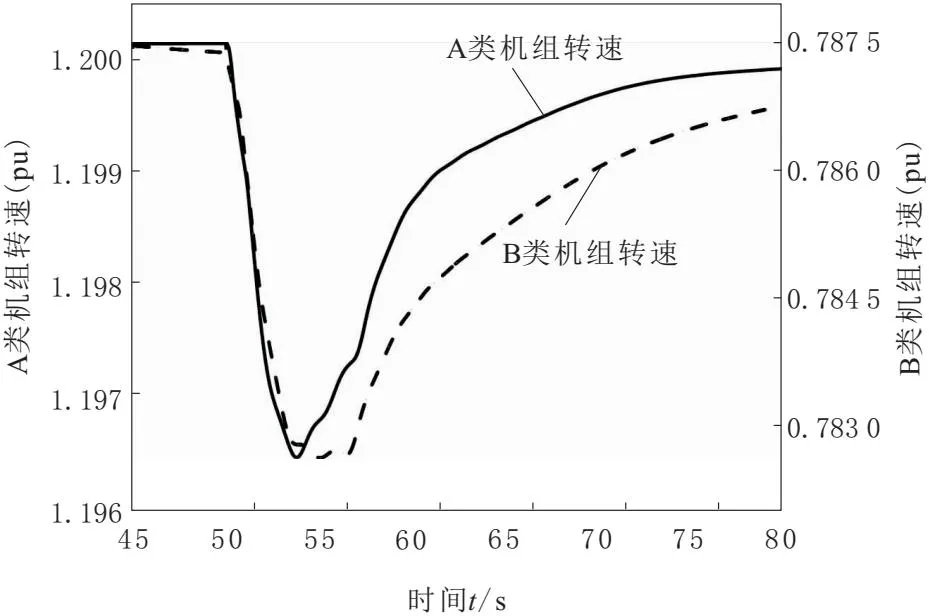
图14 等值机组A、B转速
5 结束语
本文考虑风电场尾流效应的影响对风电场参与电网调频设计了一种分群综合惯性控制策略。该策略以调频能力为依据划分风电场机群,通过聚类算法对机组进行动态等值建模,同时结合模糊自适应综合惯性控制环。通过不同工况下3种方法进行的算例仿真,验证了本策略在进行惯性控制时具备更好的调频效果与控制精度,适用于大规模风电场在尾流效应影响下参与电网频率调节,具有重要的工程实际应用价值。