高响应交流永磁伺服系统快速电流环带宽扩展方法
2024-03-24丁签华纪科辉吴昊熊卫华
丁签华 纪科辉 吴昊 熊卫华
摘要: 交流永磁伺服控制系統中现有电流采样和脉冲宽度调制(Pulse width modulation, PWM)占空比更新的方法延迟时间较长,在一定程度上会影响电机的电流环带宽和动态特性;针对该问题,建立了电流环闭环系统数学模型,分析了电流环的内部延迟和影响电流环带宽的因素,在此基础上提出了一种通过改进电流采样与PWM更新时间的电流环带宽扩展方法。该方法通过提前PWM占空比更新时机来降低电流采样和PWM占空比更新之间的延迟,减小信号传输滞后,从而扩展电流环系统的闭环带宽,提高系统响应速度。仿真与实验结果表明,相比现有电流采样方法,采用新方法的交流永磁伺服控制系统的电流环具有更宽的带宽和更高的动态响应能力,从而提高了交流伺服系统的动态响应能力和稳态精度。该方法可为交流伺服系统在机器人、高端智能装备等对响应速度和定位精度要求较高领域的应用提供参考。
关键词: 交流永磁伺服系统;快速电流环;电流采样;占空比更新;电流环带宽扩展
中图分类号: TM341
文献标志码: A
文章编号: 1673-3851 (2024) 01-0091-09
引文格式:丁签华,纪科辉,吴昊,等. 高响应交流永磁伺服系统快速电流环带宽扩展方法[J]. 浙江理工大学学报(自然科学),2024,51(1):91-99.
Reference Format: DING Qianhua, JI Kehui, WU Hao, et al. The fast current loop bandwidth expansion method for high response AC permanent magnet servo system[J]. Journal of Zhejiang Sci-Tech University,2024,51(1):91-99.
The fast current loop bandwidth expansion method for high response AC permanent magnet servo system
DING Qianhua, JI Kehui, WU Hao, XIONG Weihua
(School of Information Science and Engineering, Zhejiang Sci-Tech University, Hangzhou 310018, China)
Abstract: As for the existing method of current sampling and pulse width modulation (PWM) duty cycle update in AC permanent magnet servo control systems, the delay time is long, which will affect the current loop bandwidth and dynamic characteristics of the motor to a certain extent. In response to this issue, a mathematical model of the current loop closed-loop system was established, and the internal delay of the current loop and the factors affecting the current loop bandwidth were analyzed. Based on this, a current loop bandwidth expansion method was proposed by improving the current sampling and shortening the PWM update time. This method reduces the delay between current sampling and PWM duty cycle update by advancing the timing of PWM duty cycle update, and reduces signal transmission delay, thereby expanding the closed-loop bandwidth of the current loop system and improving the system response speed. The simulation and experimental results show that compared with existing current sampling methods, the current loop of the AC permanent magnet servo control system using the new method has a wider bandwidth and higher dynamic response ability, thereby improving the dynamic response ability and steady-state accuracy of the AC servo system. This method can provide reference for the application of AC alternating current servo systems in fields such as robots and high-end intelligent equipment withthat require high response speed and positioning accuracy.
Key words: AC permanent magnet servo control; fast current loop; current sampling; duty cycle updates; current loop bandwidth expansion
0引言
永磁同步電机作为交流永磁伺服系统的执行电机,具有功率密度高、过载能力强、效率高等优点,近年来广泛应用于纺织机械、数控机床、新能源汽车、机器人等领域。在上述领域中应用时,一般要求永磁同步电机具有较高的动态响应能力,以保证整个系统的动态性能[1-3]。在以数字信号处理器(Digital signal processor, DSP)为核心控制器的交流永磁伺服控制系统中,伺服控制系统的电流环是影响永磁同步电机动态性能的关键环节,系统中速度环和位置环的调节精度也依赖于电流环的性能。电流环带宽越宽,电流环的响应越快、性能越好;同时电流环带宽必须大于速度环和位置环带宽。因此高响应、高带宽的快速电流环对伺服系统的动态性能至关重要。
关于交流永磁伺服系统电流环带宽的扩展已有很多研究。Ha等[4]提出了一种基于无差拍方案的电流环控制方法,与经典比例积分(Proportional integral, PI)控制相比,该方法具有快速、准确等特性;Wang等[5]研究了一种抑制谐波电流的无差拍预测控制方法,该方法根据采样所得的谐波电流直接计算谐波控制电压,改善了控制系统的瞬态和稳态性能;司梦等[6]和李晴等[7]提出了一种带干扰观测器的偏差解耦控制策略,该策略利用干扰观测器观测d轴和q轴耦合电流,并将观测值反馈到电压输入端,以实现对电流环的精准控制。以上研究通过优化控制方法或者添加观测器的方式来提高电流环的性能,但没有改变电流环内部的电流采样时机以及脉冲宽度调制(Pulse width modulation, PWM)占空比计算和更新时机,仍存在电流内部延迟时间较长的问题;但该延迟时间过长会导致电流环闭环运行周期过大,系统动态响应能力降低。
针对电流采样以及PWM占空比计算和更新的延迟时间较长等问题,周力等[8]、蒋冬等[9]和Tarczewski等[10]将碳化硅场效应晶体管应用于永磁同步电机控制系统,通过提高系统的开关频率来缩短电流环的内部延迟,但该方法成本较高且适用性较差;张超若[11]在传统电流采样方法的基础上提出一个周期内双采样双PWM占空比更新(Double sampling and PWM duty cycle double update, DSDU)方法,在每个载波周期内进行两次电流采样以及PWM占空比的计算和更新,在一定程度上扩展了电流环带宽;施崇阳等[12]提出了一种即时更新PWM的控制方法,缩短了电流环的内部延迟;Lyu等[13]研究了一种基于氮化镓半导体的交流伺服驱动控制系统,并在对电流环的控制中使用DSDU方法,扩展了电流环带宽,缩短了逆变电路的开关延迟。这些研究通过改变电流采样和PWM占空比更新时机来缩短电流环的内部延迟,扩展了电流环带宽,提高了系统动态响应能力。
本文建立了电流环闭环系统数学模型,分析了电流环的内部延迟和影响电流环带宽的因素,在此基础上提出了一种通过改进电流采样与PWM更新时间的电流环带宽扩展方法。该方法通过改善电流采样和PWM占空比更新时机,可以在保持系统开关频率不变的情况下,缩短电流环的内部延迟,扩展电流环系统的闭环带宽,提高永磁同步电机的动态响应能力。本文可为交流伺服系统在机器人、高端智能装备等对响应速度和定位精度要求较高领域的应用提供参考。
1交流永磁伺服系统电流环内部延迟和响应分析
1.1交流永磁伺服系统电流环内部延迟
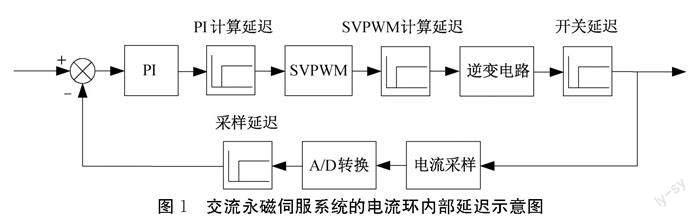
交流永磁伺服系统的电流环内部延迟主要包括反馈环节的电流采样延迟、PI计算环节的计算延迟、空间矢量脉宽调制(Space vector pulse width modulation, SVPWM)算法的计算延迟以及逆变电路中功率器件的开关延迟等。交流永磁伺服系统的电流环内部延迟示意图如图1所示,其中:采样延迟主要包括滤波延迟和A/D转换延迟;PI计算延迟和SVPWM计算延迟与控制系统处理器的计算能力有关,计算能力越强则延迟越短;逆变电路的开关延迟指开关器件在从导通到关断或从关断到导通的切换过程中存在的时间延迟,开关延迟与开关器件的特性有关。为便于分析,本文将PI计算延迟和SVPWM计算延迟合称为PWM更新延迟。
1.2交流永磁伺服系统电流环响应分析
为分析制约电流环动态响应的因素,肖海峰等[14]引入电流解耦项来分别控制交轴、直轴电流。本文进一步分析了PWM更新的延迟时间对电流环系统超调量和调节时间的影响,建立了交流永磁伺服系统的电流环模型。该模型的示意图如图2所示,其中:jωrL为电流解耦项,ωr为转子电角速度,L为电感;i*dq、idq分别为电流参考值和电流反馈值;edq、eαβ分别为旋转坐标系和静止坐标系的反电动势的补偿项。i*dq、idq的差作为PI调节器的输入,PI调节器的输出为参考电压,PI调节器和计算更新延迟位于同步旋转坐标系,电机模型位于静止坐标系。
系统采用id=0的矢量控制策略,运行时只需要控制q轴电流,从而减小了系统控制的复杂度。q轴电压方程可用公式表示为:
Uq=Rsiq+ωrψf+Ldiqdt(1)
其中:Rs为定子电阻;ψf为永磁体磁链。由图2得到同步旋转坐标系下的参考电压,可用公式表示为:
U*q=KpΔiq+Ki∫Δiqdt+ωriqL(2)
其中:Kp为比例系数,Kp=ω*cL;ω*c为电流环期望频率;Ki为积分系数,Ki=ω*cRs=Kp/Ti;Ti为积分时间常数。永磁同步电机在理想状态下运行时,q轴电压可以稳定快速跟踪参考电压,即Uq=U*q,由式(1)—(2)得:
Rs(iq+Δiq)=ω*cLΔiq+ω*cRs∫Δiqdt-LdiqTp(3)
其中:Tp为控制周期。在表贴式永磁同步电机中,定子绕组导电性能较好,定子电阻阻值很小,因此Rs(iq+Δiq)可忽略不计。暂态时永磁同步电机的速度在较短时间内变化较大,积分作用在暂态时的作用很小,因此ω*cRs∫Δiqdt可忽略不计,则式(3)可化简为:
LdiqTp≈ω*cLΔiq(4)
由式(4)可以看出,缩短控制周期可以提高电流环期望频率。增加功率器件的开关频率可以缩短控制周期,但功率器件在打开和关断时会出现开关损耗,提高开关频率会增加功率器件的开关损耗,降低其使用寿命;此外功率器件开关频率超过其设计极限时,会导致功率器件温度升高,系统可靠性降低。同时控制周期要大于电流采样、PWM更新等延迟环节的总和,因此不宜通过缩短控制周期的方式来提高电流环期望频率。由图2得到电流环开环传递函数,可用公式表示为:
G1(s)=KiKpKis+1Rss(Tss+1)LRss+1(5)
其中:Ts为电流环内部延迟时间。为简化模型,令KpKi=LRs,由式(5)可算出电流环开环传递函数G1(s)和闭环传递函数G2(s),可用公式表示为:
G1(s)=KiRss(Tss+1),
G2(s)=KpLTss2+1Tss+KpLTs(6)
电流环阻尼比ζ、无阻尼自然振荡频率ωn、超调量σ和调节时间ts可用公式表示为:
ζ=12LKpTs,
ωn=KpLTs,
σ/%=e-πL4KpTs-L×100,
ts=7Ts(7)
由式(7)得到Kp、ζ、Ts与σ关系曲线,如图3所示。从图3(a)中可以看出,在阻尼比相同的条件下,比例系数与延迟时间成反比,增大比例系数可以在一定程度上缩短延迟时间。从图3(b)中可以看出,在比例系数相同的条件下,超调量与延迟时间成正比,可知缩短延迟时间有助于降低电流环系统的超调量。
ωb1为闭环幅頻特性为-3 dB时对应的频率,ωb2为闭环相频特性为-45°时对应的频率,常取闭环幅频特性频率和闭环相频特性频率之中较低的作为闭环系统的带宽频率。开环截止频率、闭环幅频特性频率和相频特性频率可用公式表示为:
ωc=KpLTs1+4ζ4-2ζ2,
ωb1=KpLTs1-2ζ2+2-4ζ2+4ζ4,
ωb2=KpLTs(1+ζ2-ζ)(8)
其中:ωc为开环截止频率;ωb1为闭环幅频特性频率;ωb2为闭环相频特性频率。选择阻尼比ζ=0.707,则电流调节器比例系数可用公式表示为:
Kp=L2Ts(9)
电流环开环截止频率和闭环带宽频率可用公式表示为:
ωc=1Ts2-12,
ωb=3-12Ts(10)
由以上分析可知,缩短系统PWM更新的延迟时间,可以提高电流环系统开环截止频率和闭环带宽频率,降低电流环系统的超调量,改善电流环动态性能。通过增加功率器件的开关频率的方式可以缩短控制周期Tp,能在一定程度上提高电流环带宽频率,但会导致功率器件损耗增加和使用寿命降低。通过增大比例系数的方式可以降低延迟时间,但过大的比例系数会使系统响应过快,从而导致系统不稳定。针对这些问题,本文提出一种新型带宽扩展方法,在保持开关频率和PI控制器参数不变的情况下,缩短电流环内部延迟,扩展电流环闭环带宽。
2交流永磁伺服系统电流环带宽扩展方法分析
对于高性能数字信号处理器来说,采样的延迟时间和PWM更新的延迟时间很短,传统电流采样方法和DSDU方法均采用固定时刻进行电流采样和PWM占空比更新,不能完全发挥处理器性能。本文提出的新型带宽扩展方法,相比以上两种方法,不同之处在于新型带宽扩展方法在每个载波周期开始和中点时刻进行两次电流采样,并在PWM占空比计算后立即更新,缩短了电流环内部延迟时间,从而扩展电流环带宽。
2.1传统电流采样方法
传统电流采样方法电流采样和PWM更新时序图如图4所示,其中:Tc表示三角载波的周期;Td1表示电流采样的延迟时间;Td2表示PWM更新的延迟时间;(k)Tc表示第k个载波周期所在的时刻;i(k)表示第k次的电流采样值;d(k)Tc表示第k个载波周期对应的PWM输出;r(k)表示第k次更新的PWM占空比输出。在载波周期开始(k)Tc时刻对永磁同步电机三相电流进行电流采样,电流采样值i(k)经过Td1时间长度的延迟后,开始参与下一周期r(k)的计算,计算在Td2时间内完成,计算结果r(k)在(k+1)Tc时刻进行更新。在(k+1)Tc时刻对永磁同步电机三相电流进行电流采样,(k+1)Tc周期的电流采样值i(k+1)经过Td1时间长度的延迟和Td2时间长度的计算后,计算结果r(k+1)在(k+2)Tc时刻进行更新,以此类推。从开始对永磁同步电机三相电流进行电流采样,再到PWM占空比更新,所经历时间为Tc,即Ts=Td1+Td2=Tc。
2.2DSDU方法
DSDU方法电流采样和PWM更新时序图如图5所示。在载波周期开始(k)Tc时刻对永磁同步电机三相电流进行电流采样,电流采样值i1(k)经过Td1时间长度的延迟后,开始参与r1(k)的计算,计算在Td2时间内完成,计算结果r1(k)在载波峰值(k+0.5)Tc时刻进行更新。在载波周期峰值(k+0.5)Tc时刻对永磁同步电机三相电流进行电流采样,电流采样值i2(k)经过Td1时间长度的延迟和Td2时间长度的计算后,计算结果r2(k)在(k+1)Tc时刻进行更新,以此类推。从开始对永磁同步电机三相电流进行电流采样,再到PWM占空比更新,所经历时间为0.5Tc,即Ts=Td1+Td2=0.5Tc。
设定三角载波频率为10 kHz,电流采样频率为20 kHz。采用DSDU方法时,控制器输出的PWM波形如图6所示。在0 μs时刻对永磁同步电机三相电流进行电流采样,在50 μs时刻开始更新PWM,在76.8 μs时刻PWM更新完成。
2.3新型带宽扩展方法
随着半导体技术的发展,DSP芯片性能有很大程度上的提升,以TI的TMS320F28379D芯片为例,芯片内部集成了三角函数数学单元、专用运算单元等模块,能提升PWM占空比计算的速度。因此,本文在DSDU方法的基础上,提出了一种新型带宽扩展方法。该方法电流采样和PWM更新时序图如图7所示。在载波周期开始(k)Tc时刻对永磁同步电机三相电流进行电流采样,电流采样值i1(k)经过Td1时间长度的延迟后,开始参与r1(k)的计算,计算在Td2时间内完成,计算结果r1(k)在计算完毕后立即进行更新。在载波周期峰值(k+0.5)Tc时刻对永磁同步电机三相电流进行电流采样,电流采样值i2(k)经过Td1时间长度的延迟和Td2时间长度的计算后,计算结果r2(k)在计算完毕后立即进行更新,以此类推。理论上新型带宽扩展方法从开始采样到PWM占空比更新所经历时间与处理器芯片的计算能力相关,采样延迟Td1不变,占延迟环节很大比重的Td2会随着处理器计算能力的增强而缩短,总延迟Ts也会随之缩短。TMS320F28379D芯片从开始对永磁同步电机三相电流进行电流采样,再到PWM占空比更新,所经历时间小于0.25Tc,即Ts=Td1+Td2<0.25Tc。
采用新型带宽扩展方法时,控制器输出的PWM波形如图8所示。在0 μs时刻对永磁同步电机三相电流进行电流采样,计算完成后立即开始更新PWM,在24.8 μs时刻PWM更新完成。与之类似,在50.0 μs时刻对永磁同步电机三相电流进行电流采样,在74.1 μs时刻PWM更新完成。
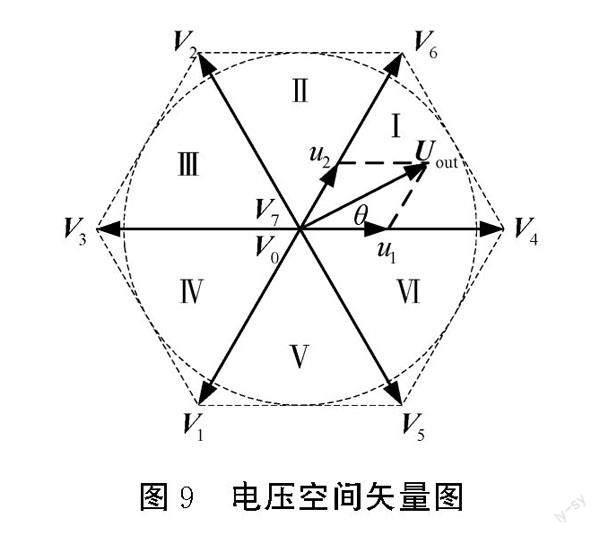
永磁同步电机在运行过程中,转子位置一直在变化,转子位置不同会对应不同的SVPWM扇区,每个扇区都有其对应的电压矢量组合和调制方法,电压空间矢量图如图9所示,其中:V0和V7为零矢量,V1-V6为非零矢量;Ⅰ-Ⅵ分别代表第一扇区至第六扇区;Uout为合成电压矢量;u1、u2分别为Uout所在扇区相邻两个非零矢量方向上的分量。在使用新型带宽扩展方法时,要使永磁同步电机稳定运行,就必须保证从电流采样时刻到PWM更新完成这段时间内,SVPWM始终输出零矢量,而输出零矢量会使得逆变器的电压输出能力降低。
以第一扇区为例进行分析,零矢量作用时间可用公式表示为:
T0=Tp1-3‖Uout‖udccosπ6-θ(11)
其中:T0为零矢量作用时间;udc为母线电压;θ为转子角度,0≤θ≤π/3。在合成电压矢量和母线电压确定的情况下,转子角度为π/6时T0取最小值,可用公式表示为:
T*0=Tp(1-3‖Uout‖udc)(12)
系统采用七段式SVPWM方式,中间插入V7零矢量,零矢量V0和V7作用时间相同,各占零矢量总时长T0的一半,那么DSP的计算时间Td2必须满足
Td2≤T*02=Tp21-3‖Uout‖udc(13)
化简得:
3‖Uout‖udc≤Tp-2Td2Tp(14)
由此可见,只需将母线电压提高至原来的Tp/(Tp-2Td2)倍,即可在不损失逆变器电压输出能力的情况下运行新型带宽扩展方法。
对比分析以上3种方法的延迟时间可以发现:传统电流采样方法的延迟时间最长,为一个载波周期;DSDU方法的延迟时间相比传统电流采样方法的延迟时间缩短了1倍,为半个载波周期;新型带宽扩展方法的延迟时间最短,小于四分之一个载波周期。相比其他两种方法,新型带宽扩展方法能将延迟时间缩至最短,从而进一步提高系统响应速度,扩展电流环闭环带宽。在不改变系统开关频率和PI控制器参数的情况下,由式(10)可知,在新型带宽扩展方法下,电流环闭环带宽相比传统电流采样方法下的电流环闭环带宽提高4倍以上,相比DSDU方法下的电流环闭环带宽提高2倍以上。
3实验验证
DSDU方法的应用已相对成熟,因此对交流永磁伺服系统在使用新型带宽扩展方法和DSDU方法时的性能进行对比实验。在交流永磁伺服控制系统中,电流环闭环带宽影响电流环系统对输入信号的響应速度,是评价伺服系统快速性的指标之一;电流环反馈电流与输入电流的差为误差,误差越小表明对永磁同步电机的控制效果越好;永磁同步电机的动态性能可以直观显示永磁同步电机的运行情况,是评价伺服系统性能的重要指标。因此对比实验主要考虑交流永磁伺服系统电流环闭环带宽频率、反馈电流对输入电流的跟随情况以及交流永磁伺服系统的动态性能等三个方面,为此本文搭建了以TMS320F28379D型号的DSP芯片为主控芯片的实验平台。实验平台照片如图10所示。在图10(b)中,从左到右依次为永磁同步电机、转速转矩传感器、负载电机,其中:永磁同步电机参数如表1所示;转速转矩传感器最大转矩50 N·m,额定转速6000 r/min;负载电机额定功率1.1 kW,额定转速3000 r/min。
通过交流调压电源给实验平台输入交流电压100 V,设置系统电流采样频率为20 kHz,载波频率为10 kHz,使用霍尔电流传感器检测并反馈定子电流,使用增量式编码器检测转子角度和永磁同步电机转速。对照实验除控制方法不同外,其余实验条件均相同。
两种控制方法下的电流环闭环幅频特性曲线和相频特性曲线如图11所示。从图11中可以看出,DSDU方法下的电流环闭环带宽约为440 Hz,新型带宽扩展方法下的电流环闭环带宽约为1 kHz,新型带宽扩展方法下的闭环带宽相比于DSDU方法下的闭环带宽提高2倍以上,同理论分析保持一致。设定输入电流为频率1 kHz的正弦波,两种控制方法下反馈电流对输入电流的跟随情况如图12所示。从图12中可以看出,相比DSDU方法,新型带宽扩展方法的电流响应更加贴合给定的输入电流,电流的响应更快,精度更高,具有更好的动态响应性能。
在验证新型带宽扩展方法能够扩展电流环闭环带宽后,以电流环为内环加入速度环,构建双闭环控制系统,对系统的上升时间、超调量、调节时间和稳态误差等性能进行实验分析。设定永磁同步电机转速为500 r/min,两种方法下的永磁同步电机从启动到稳定运行时的转速变化曲线如图13所示,永磁同步电机的转速性能指标如表2所示。
由表2可以看出,相比DSDU方法,新型带宽扩展方法在上升时间、超调量、调节时间和稳态误差等方面性能均有所提高,上升时间同比减少0.64 s,超调量同比降低0.42%,调节时间同比减少0.72 s,稳态误差同比降低0.18%,永磁同步电机运行速度的稳态和动态性能都得到了提高。
4结论
本文建立了电流环闭环系统数学模型,分析了电流环的内部延迟和影响电流环带宽的因素,在此基础上提出了一种新型带宽扩展方法。新型带宽扩展方法通过提前PWM占空比更新时间来缩短从电流采样到PWM占空比更新所需要的时间。相比现有的电流采样和PWM占空比更新方法,新型带宽扩展方法可以进一步扩展系统电流环闭环带宽,提高系统动态响应性能,在对伺服系统的快速性指标有较高需求的应用场合具有实用价值。实验结果表明,相比DSDU方法,采用新型带宽扩展方法的快速电流环具有高响应、高带宽的特点,可以提高系统的响应速度,使电流环具有更精确的电流跟随性能,同时能够降低永磁同步电机运行时的上升时间、调节时间和超调量,减小系统的稳态误差,从而有效提高交流永磁伺服系统的稳态和动态性能。
参考文献:
[1]葛兆栋, 邱建琪, 史涔溦. 永磁伺服系统电流环带宽扩展研究[J]. 微电机, 2020, 53(11): 70-74.
[2]刘虎, 袁嫣红, 鲁文其. 基于矢量控制的永磁交流伺服系统运行性能分析[J]. 浙江理工大学学报, 2014, 31(5): 276-280.
[3]施邹云, 潘海鹏. 基于CMAC和重复补偿的电脑横机伺服控制方法研究[J]. 浙江理工大学学报(自然科学版), 2016, 35(2): 244-249.
[4]Ha V T, Lam N T, Vinh V Q, et al. Advanced control structures for induction motors with ideal current loop response using field oriented control[J]. International Journal of Power Electronics and Drive Systems, 2019, 10(4): 1758-1771.
[5]Wang W S, Liu C H, Song Z X, et al. Harmonic current suppression for dual three-phase PMSM based on deadbeat control and disturbance observer[J]. IEEE Transactions on Industrial Electronics, 2023, 70(4): 3482-3492.
[6]司梦, 李好文, 郑岗, 等. 永磁同步电机偏差解耦控制策略研究[J]. 电气传动, 2020, 50(1): 30-35.
[7]李晴, 司烨, 李锋, 等. 改进型永磁同步电机解耦控制策略研究[J]. 微特电机, 2019, 47(9): 44-47.
[8]周力, 周龙, 王欣, 等. 基于SiC MOSFET的高速永磁同步电机驱动系统[J]. 微电机, 2022, 55(8): 55-58.
[9]蒋冬, 赵金星, 胥阳, 等. SiC器件在高速永磁电机转速跟踪控制中的应用研究[J]. 控制工程, 2023, 30(4): 687-693.
[10]Tarczewski T, Skiwski M, Grzesiak L M, et al. PMSM servo-drive fed by SiC MOSFETs based VSI[J]. Power Electronics and Drives, 2018, 3(1): 35-45.
[11]張超若. 交流伺服系统电流环带宽的扩展方法研究[D]. 哈尔滨: 哈尔滨工业大学,2019: 13-16.
[12]施崇阳, 陈克乐, 陈兴龙. 永磁同步电机电流环带宽扩展研究[J]. 微电机, 2015, 48(11): 43-46.
[13]Lyu Z K, Yang M, Long J, et al. Current loop bandwidth extension for AC servo system based on GaN-HEMT and FPGA[C]∥ 2019 10th International Conference on Power Electronics and ECCE Asia (ICPE 2019-ECCE Asia). Busan, Korea (South). IEEE, 2019: 1-6.
[14]肖海峰, 贺昱耀, 乔社娟. 永磁同步电机电流环频率响应改进策略研究[J]. 电机与控制学报, 2018, 22(6): 107-113.
(责任编辑:康锋)
收稿日期: 2023-02-20网络出版日期:2023-07-07网络出版日期
基金项目: 国家自然科学基金项目(52277068);浙江省科技厅重点研发计划(2022C01242,2023C01159)
作者简介: 丁签华(1997-),男,河南周口人,硕士研究生,主要从事电机驱动及控制方面的研究。
通信作者: 纪科辉,E-mail:jkh@zstu.edu.cn
