青菜高密度移栽机植苗机构的设计与试验鲍
2024-03-24李旭俞高红赵雄王磊
李旭 俞高红 赵雄 王磊

摘要: 目前國内移栽机尚无成熟的适用于青菜等多行密植蔬菜移栽的植苗机构;针对小株距小行距、高效率的密植移栽要求,设计了一种非圆齿轮行星轮系八行同步植苗机构,并进行了运动学仿真和田间移栽试验。对非圆齿轮行星轮系进行了运动学建模与分析,开发了植苗机构辅助分析与优化设计软件;分析了不同机构参数对植苗轨迹姿态的影响,并通过人机交互的方式得到一组满足青菜小株距移栽要求的机构参数;建立了八行同步植苗机构的三维模型,利用虚拟样机仿真技术绘制出仿真轨迹,并与理论轨迹进行对比,以验证植苗机构三维设计的正确性;开展了田间移栽试验,以验证该机构的可行性和实用性。试验结果表明:在作业转速为15 r/min、前进速度为55 mm/s的情况下,八行植苗机构的作业株距和行距均为110 mm,平均植苗成功率为93.9%,移栽密度超过70株/m2,试验移栽效率为240株/min,表明该机构在机械化密植移栽作业中有较高的应用价值。该研究为高密度移栽机植苗机构的研发提供了理论和试验依据,促进了密植型蔬菜钵苗机械化移栽的进程,为密植移栽机的进一步研究提供技术支持和参考。
关键词: 密植;植苗机构;行星轮系;运动学分析;移栽试验
中图分类号: S223.9
文献标志码: A
文章编号: 1673-3851 (2024) 01-0100-12
引文格式:鲍李旭,俞高红,赵雄,等. 青菜高密度移栽机植苗机构的设计与试验[J]. 浙江理工大学学报(自然科学),2024,51(1):100-111.
Reference Format: BAO Lixu, YU Gaohong, ZHAO Xiong, et al. Design and experiment of a planting mechanism of high-density transplanters for brassica chinensis[J]. Journal of Zhejiang Sci-Tech University,2024,51(1):100-111.
Design and experiment of a planting mechanism of high-density transplanters for brassica chinensis
BAO Lixua, YU Gaohonga,b, ZHAO Xionga,b, WANG Leia,b
(a.School of Mechanical Engineering; b.Zhejiang Provincial Key Laboratory of Planting Equipment Technology, Zhejiang Sci-Tech University, Hangzhou 310018, China)
Abstract: At present, there is no mature seedling transplanting mechanism suitable for transplanting multiple rows of closely planted vegetables such as brassica chinensis in China; according to the requirements of close planting and transplanting with small plant spacing, small row spacing and high efficiency, an eight-row synchronous seedling planting mechanism with non-circular gear planetary gear train was designed, and the kinematics simulation and field transplanting experiment were carried out. The kinematics modeling and analysis of non-circular gear planetary gear train were carried out, and the auxiliary analysis and optimization design software of the seedling planting mechanism was developed; the effects of different mechanism parameters on the trajectory of seedlings were analyzed, and a set of mechanism parameters meeting the requirements of small plant spacing transplanting of brassica chinensis were obtained through human-computer interaction; the three-dimensional model of the eight-row synchronous seedling planting mechanism was established, the simulation trajectory was drawn by virtual prototype simulation technology, and the correctness of the three-dimensional design of seedling planting mechanism was verified by comparing with the theoretical trajectory; field transplanting experiments were carried out to verify the feasibility and practicability of the mechanism. The results showed that when the operating speed was 15 r/min and the forward speed was 55 mm/s, the operating plant spacing and row spacing of the eight-row seedling planting mechanism were both 110 mm, the average success rate of seedling planting was 93.9%, the transplanting density was more than 70 plants/m2, and the experimental transplanting efficiency was 240 plants/min, indicating the mechanism′s high application value in mechanized close planting and transplanting operation. This study provides a theoretical and experimental basis for the research and development of high-density transplanter seedling planting mechanisms, promotes the mechanized transplanting process of closed planted vegetable pot seedlings, and provides technical support and reference for the further research of dense transplanters.
Key words: close planting; seedling planting mechanism; planetary gear train; kinematic analysis; transplanting experiment
0引言
目前,由于水土流失、荒漠化等原因,中国的可种植土地面积在不断减少。为了提高土地利用率,大多数的绿色蔬菜采取高密度种植[1],即行距和株距都小于150 mm,如青菜、鸡毛菜等[2]。这种高密度蔬菜种植主要依靠人工进行移栽[3],生产劳动强度大,效率低,密植移栽机是提升高密度种植效率的有效手段,但相关研究较少。
国外密植移栽机的研究主要集中在日本和韩国。如日本洋马公司的PF2R型两行自走式蔬菜移栽机[4],采用行星轮系-滑道式取苗机构以及鸭嘴式栽植机构,该机型栽植行距为450 mm左右,作业株距为260~800 mm,作业效率可达2500株/(行·h),但其作业参数不能满足国内青菜密植移栽的要求。日本久保田公司的KP-201CR半自动两行自走式蔬菜移栽机[5],该机型的作业行距和株距范围分别为280~550 mm和220~800 mm,工作效率达1500株/(行·h),但其需要人工将秧苗喂入栽植吊杯,工作量大、效率低[6],同样不能满足国内密植移栽的要求。韩国的A5-1200型半自动密植移栽机[7],可以进行8行移栽作业,行距设定为150 mm,而株距可在100~500 mm范围内调整,然而其在作业时需要2名操作人员手动进行取苗和投苗,虽然在一定程度上减少了劳动力,但并未完全实现自动化;此外,该机器采用间歇式的移栽方式,工作效率相对较低,仅有600 株/(行·h)。目前国内蔬菜移栽机的植苗机构作业株距和行距都比较大,一般在300~500 mm,无法满足密植型蔬菜小株距小行距的栽植农艺要求[8]。植苗机构作为移栽机重要的工作部件[9],对移栽机的栽植效率以及栽植后的秧苗质量均有较大影响,因此为了满足密植型蔬菜小株距小行距的特定种植需求,设计一种与之相适应的多行同步植苗机构尤为关键。
近年来,国内针对植苗机构的研发工作也取得了一定的进展。黄前泽[10]、徐乐辉[11]提出了一种旋转式非圆齿轮行星轮系单行植苗机构,该机构植苗效率最高可达100株/min,但其设计的非圆齿轮与栽植轨迹主要针对大株距的移栽场合。吴彦强等[12]针对山东地区辣椒密植需求,研制了自走式高密度辣椒移栽机,该机型可同时栽植6行钵苗,作业行距为300 mm,株距在160 mm左右,可满足青菜密植的株距、行距要求。汪应萍[13]针对青菜密植移栽的农艺要求,提出了一种史蒂芬森型六杆八行植苗机构,其理论移栽株距和行距都为110 mm,轨迹设计满足小株距移栽的农艺要求,但由于连杆机构在运动速度较高时振动较大,限制了该植苗机构的工作效率。
密植型蔬菜的经济价值高、产量需求大,国外尚无密植型全自动移栽机,已有的小型移栽机不适用于中国密植农艺要求。因此本文针对高密度、高效率两大设计要求,配合八行取苗机构进行青菜钵苗移栽作业,在非圆齿轮行星轮系八行取苗机构[14]的基础上提出了一种非圆齿轮行星轮系八行植苗机构,实现小株距与小行距多行移栽,以解决密植型蔬菜的机械化移栽的难题,促进密植型蔬菜钵苗机械化移栽的进程,提高农业生产的效率和质量,为密植移栽机的进一步研究提供技术支持和参考。
1八行植苗机构的工作原理
针对密植型蔬菜小行距小株距、多行同步植苗的农艺要求,本文提出了一种非圆齿轮行星轮系八行植苗机构,机构示意图如图1所示。该机构主要分为两部分:传动部分和鸭嘴式栽植器部分。齿轮箱对称布置在机构左右两侧,两个齿轮箱之间等间距布置有16个栽植器(上下各8个),实现八行同步移栽。
该机构的传动部分由7个非圆齿轮组成,中间轮8和8′、行星轮9分别是由中间轮2和2′、行星轮3绕太阳轮1啮合旋转180°得到。太阳轮1、中间齿轮2和2′、行星齿轮3和行星架5构成齿轮系传动,作业时太阳轮固定不动,行星架顺时针匀速转动[15],太阳轮1与中间轮2相互啮合传动,中间轮2′与中间轮2固定在一起,而中间轮2′与行星轮3相互啮合传动,使得行星轮作逆时针非匀速转动[16],栽植器通过行星轮轴4与行星轮3固连,通过两级非圆齿轮传动形成了植苗轨迹。
由于该植苗机构整体是左右对称的,以最左侧的齿轮箱和栽植器为例,对其余14个栽植器及另一侧齿轮箱进行简化处理。在旋转式传动箱体上下对称布置2个栽植器[17]。由于上下两个栽植器是相同的,因此本文以上栽植器为例对如何进行栽植作业作具体说明。栽植器机构简图如图2所示。固定板与行星轮轴固定在一起,而行星轮轴与行星轮也固定在一起,故行星轮会带动固定板一起作非匀速转动。左右摆动臂分别通过铰链与固定板连接,在固定板转动时,左摆动臂会与固连在行星架上的凸轮推程段发生碰撞,左摆动臂相对于固定板顺时针旋转一定角度,进而带动右摆动臂相对于固定板逆时针旋转一定角度。由于左右栽植嘴分别与左右摆动臂固定在一起,故左右栽植嘴也会随着左右摆动臂同时转动,此时形成了栽植器的张开状态,左摆动臂与凸轮的远休止段碰撞,使栽植器的张开状态持续一段时间。固定板继续转动,在拉簧的拉力作用下,左摆动臂与凸轮的回程段碰撞,左右栽植嘴迅速闭合。如此,行星架的周期性旋转使栽植器进入周期性的张开和闭合状态。
2植苗机构运动学模型
运动学分析是优化设计的重要手段,以在满足运动要求的前提下优化机构参数,进而降低结构的复杂性[18]。由于八行植苗机构两侧完全对称,且一行8个栽植器运动轨迹完全一样,故在运动学建模时可只取一侧栽植器作分析。非圆齿轮可简化为节曲线的形式,非圆齿轮间的啮合旋轉可简化为节曲线间的纯滚动,本文构建的植苗机构运动学模型如图3所示。以太阳轮旋转中心O点为坐标原点建立坐标系[19],对X轴下方的非圆齿轮及栽植器进行计算和求解,而上方的非圆齿轮及栽植器由前者绕太阳轮啮合旋转180°得到。首先分析行星轮系中各非圆齿轮之间存在的转角关系,并构建传动比函数;然后在齿轮啮合中心距给定的条件下计算出非圆齿轮的节曲线坐标,并推导出植苗机构栽植器尖点D的位移和速度方程;最后获得由栽植器尖点D周期运动形成的植苗轨迹。
植苗机构运动学模型中的参数及其说明见表1。由于中间轮2和2′固连,它们在单位时间内产生的角位移相等,故在建立运动学模型时,为了简化建模过程,可以将中间轮2和2′先视作同一个非圆齿轮,在后续计算非圆齿轮节曲线坐标时再分开计算。
已知非圆齿轮节曲线是封闭的,即转角φ变化范围为φ∈[0,2π]。由于行星轮和中间轮的转角是在同一时间内完成的[20],即存在对应关系:φ31=f(φ21),当φ21=0时φ31=0,当φ21=2π时φ31=2π。根据上述转角关系,先设定行星轮与中间轮的转角函数关系为:
φ31=φ21+∑3i=1kisin(iφ21)(1)
将φ21=0及φ21=2π分别代入式(1)中,验证其满足上述设定的转角约束条件。
由式(1)可求得中间轮与行星轮的传动比函数:
i23=r32r23=ω2ω3=dφ21/dtdφ31/dt=11+∑3i=1ikicos(iφ21)(2)
其中:ω2为中间轮的自转角速度;ω3为行星轮的自转角速度。
由于太阳轮与中间轮,中间轮与行星轮之间的中心距是相等的,因此得到:
r23(φ23)+r32(φ32)=a,
r12(φ1)+r21(φ21)=a(3)
其中:φ23为中间轮相对于行星架的角位移;φ32为行星轮相对于行星架的角位移。
将式(3)代入式(2)中,可以得到:
r23(φ21)=a1+∑3i=1ikicos(iφ21)2+∑3i=1ikicos(iφ21),
r32(φ31)=a-r23(φ21)(4)
由于太阳轮和行星轮对称分布在中间轮两侧,易知:
r21(φ21)=r23(φ21+π)(5)
将式(4)代入式(5)中,可以得到:
r21(φ21)=a1+∑3i=1(-1)iikicos(iφ21)2+∑3i=1(-1)iikicos(iφ21)(6)
由于太阳轮与中间轮的节曲线周长相等,则有:
∫2π0r21(φ21)dφ21=∫2π0r12(φ1)dφ1(7)
当行星架转过dφ1时,中间轮转过dφ21,即r21(φ21)dφ21=r12(φ1)dφ1,则有:
φ1=∫φ210r21(φ21)a-r21(φ21)dφ21(8)
将式(6)代入式(8),可以得到:
φ1=φ21+∑3i=1(-1)ikisin(i·φ21)(9)
式(9)可改写为φ1=F(φ21),则:
φ21=F-1(φ1)(10)
将式(10)代入式(1)中,便得到了φ31与φ1的函数关系,由于自变量φ1是已知量,故中间轮的角位移φ21和行星轮的角位移φ31可以轻易求解。
在用数值法求解行星轮系总传动比时,可以将行星架旋转一周的转角单位化,取360等分,则有:
i31=ω3ω1=-φ·31φ·1=-φ·311=-φ·31(11)
其中:ω1为行星架角速度(匀速),负号代表行星轮与行星架旋转方向相反。
为了便于求解各个非圆齿轮的节曲线,需要对中间轮2和中间轮2′分开求解。根据行星轮系转化原理,给太阳轮加上一个假想旋转,大小等于行星架转速ω1,方向与ω1相反,则行星轮系转化为定轴轮系[21]。在转化轮系中,行星轮与太阳轮的传动比在数值上等于原行星轮系中行星轮与行星架的传动比i31,中间轮2与太阳轮的传动比在数值上也等于原行星轮系中中间轮2与行星架的传动比i21:
i21=ω2ω1=φ·21φ·1=φ·211=φ·21(12)
则太阳轮与中间轮2啮合的向径分别为:
r21=a1+i21,
r12=a-r21(13)
中间轮2′与行星轮的传动比:
i32=i31i21(14)
则中间轮2′与行星轮啮合的向径分别为:
r32=a1+i32,
r23=a-r32(15)
至此,已知非圆齿轮节曲线的向径和对应的转角,便可在极坐标系下绘出非圆齿轮的节曲线。
接下来建立栽植器尖点D的运动学方程,其中行星轮轴心的位移方程为:
xO3=2acos(φ0+φ1),
yO3=2asin(φ0+φ1)(16)
栽植器尖点D的位移方程:
xD=xO3+Scos(φ0+φ1-φ31-α0-π),
yD=yO3+Ssin(φ0+φ1-φ31-α0-π)(17)
将式(16)和式(17)分别对时間t求导,可以得到行星轮轴心和栽植器尖点D的速度方程:
x·O3=-2aφ·1sin(φ1+φ0),
y·O3=2aφ·1cos(φ1+φ0)(18)
x·D=x·O3-Sφ·1-φ·31·sin(φ0+φ1-φ31-α0-π),
y·D=y·O3+Sφ·1-φ·31·cos(φ0+φ1-φ31-α0-π)(19)
3参数分析与优化
3.1机构辅助分析与优化软件
栽植器轨迹的形状是影响植苗功能的主要因素[22]。根据上文建立的机构运动学模型可知,为获取一条符合青菜小株距移栽农艺要求的植苗轨迹及轨迹参数,需要对非圆齿轮行星轮系各机构参数进行调整。这是一个复杂的多目标多变量优化问题,每调整一次参数,都需要重新计算相关的数据,计算量庞大,而人机交互优化方式能较好解决该难题。本文基于Visual Basic 6.0编写了计算非圆齿轮节曲线的辅助分析与优化设计软件,为了便于用户和计算机之间的信息交互,搭建了如图4所示的用户界面(UI),UI可以为设计工作带来简便性和直观性。该软件的主界面包括菜单栏(区域1)、工具栏(区域2)、参数输入栏(区域3)、参数输出窗口(区域4)和图形显示窗口(区域5)等5个主要区域。
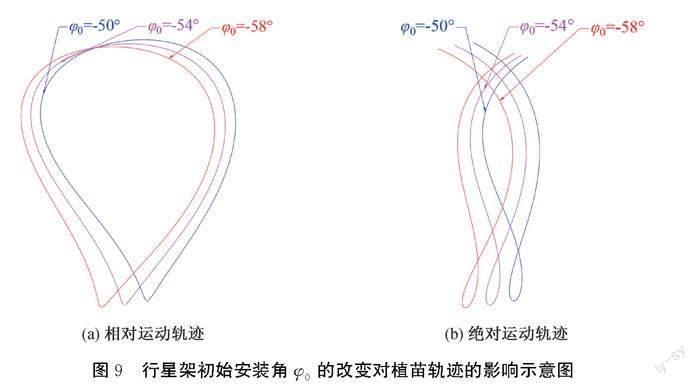
在机构参数优化过程中,相关参数的调整在参数输入栏中进行,而一些重要参数值的输出,包括栽植器出土角和入土角等,则显示在输出窗口中。区域5是软件的主要显示和人机交互区域,通过调整区域3中的参数可以实时地将植苗机构的位置和运动状态显示在区域5中,包括栽植器尖点的相对运动轨迹(静轨迹)、绝对运动轨
3.3植苗机构参数优化步骤与结果
为了得到符合前文提出的若干优化目标的植苗轨迹,参数优化过程如下:
a)预先人为给定一组各参数初始值,同时也会获得对应的植苗轨迹和一组优化目标值。
b)通过上述分析明确了各参数变化对植苗轨迹的影响规律,通过人机交互的方式不断针对性改变上述各参数值大小,直到植苗轨迹和其对应的优化目标值逐步符合要求。
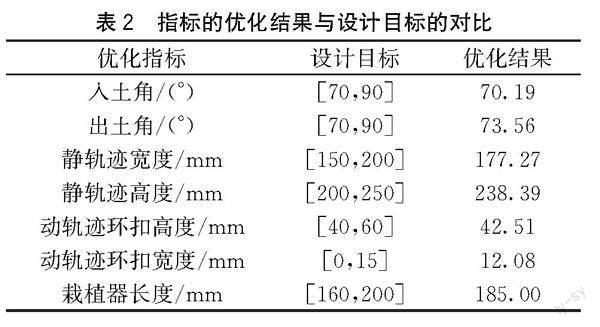
依据上述步骤,最终得到一组较优的机构参数:a=59 mm,k1=-0.12,k2=0.07,k3=0,φ0=-54°,α0=-164°,γ0=142°,S=185 mm。此時,栽植器插入垄面的深度为60 mm,对应于前文优化目标的优化结果如表2所示,相关数据在轨迹中测量的位置如图10所示。
4八行植苗机构结构设计与仿真
4.1整体结构设计
非圆齿轮行星轮系八行同步植苗机构的三维模型如图11所示,该机构由两套对称布置的行星轮系齿轮箱和上下布置的16个栽植器部件组成。在植苗机构旋转运动过程中,由于16个栽植器通过L型横杆固连,故植苗轨迹完全相同。该八行植苗机构设定的理论株距为110 mm,横向连续布置的8个栽植器的间距为110 mm,故理论行距也为110 mm。
4.2植苗机构仿真分析
基于SolidWorks Motion模块对建立好的植苗机构(单边)进行运动学仿真分析,得到栽植器尖点的相对运动轨迹仿真结果,如图12(a)所示;并将其与辅助分析与优化设计软件中的理论轨迹作对比[25],如图12(b)所示,仿真轨迹与理论轨迹基本重合,对比情况验证了三维模型设计的正确性。
除了将仿真轨迹的形状与理论轨迹做对比外,还需要验证本文提出的若干优化目标值。优化目标值在仿真轨迹中的示意图如图13所示,齿轮箱以连杆形式表示,垄面设定在轨迹最底端上方60 mm处。仿真结果与理论优化值对比情况如表3所示,可以看出,同一优化指标下的仿真值和理论值基本一致,进一步验证了三维设计的正确性。
利用SolidWorks Motion模块的速度分析功能导出栽植器下端尖点D一个周期内的水平和竖直方向的速度变化数据,并在Origin中绘制仿真速度曲线和理论速度曲线进行对比如图14所示。由于零件间存在碰撞,所以曲线存在锯齿状波动,但不会影响整体变化趋势,仿真速度曲线与理论速度曲线基本重合,进一步验证了三维模型设计的正确性。仿真设定的机架转速为20 r/min,水平方向速度曲线在0.3 s左右时存在速度接近0 mm/s的时刻,对应的竖直方向速度曲线在0.3 s左右时存在速度为0 mm/s的时刻,此时栽植器正在执行植苗动作,可以实现接近零速度植苗。
5八行植苗机构的试验
为了进一步验证八行植苗机构理论计算模型的正确性以及运用到实际工作的可靠性,将实物样机装配在自主设计的青菜高密度八行自动移栽机上进行田间试验,八行植苗机构实物样机如图15中矩形框内所示,青菜高密度自动移栽机整体如图16所示。
试验场地垄面宽110 cm,垄高15 cm;试验选用培育时间为30 d的青菜苗,苗株高8~15 cm,真叶数3~5片,散坨率小于5%(钵苗的盘根效果会直接影响取苗效果)。植苗机构田间试验如图17所示,株距测量结果如图18所示,相邻青菜苗的距离约为110 mm,与理论设计株距一致,验证了实物样机搭建的正确性。
试验中取苗机构转速设置为15 r/min,由于取苗机构旋转一周可取苗16株,八行植苗机构旋转一周可以栽植钵苗16株,故对应的植苗机构转速也设置为15 r/min,移栽机前进速度为55 mm/s,移栽株距和行距均为110 mm,故移栽效率为240株/min。移栽过程中,出现漏栽、倒伏、埋苗[26]均记为移栽失败。试验结束后,根据记录的钵苗总数以及移栽成功数,可以计算出移栽成功率。由于钵苗移栽需要经过取苗、植苗两个阶段,故移栽成功率实际上与取苗成功率、植苗成功率存在一定关系,而本文主要研究对象为植苗机构,故应由植苗成功率而非移栽成功率来反映机构的实用性,所以还需要记录取苗成功率。为了忽略取苗失败的影响,假设取苗成功率可以达到100%。本文植苗成功率由式(21)计算得出:
σz/%=σyσq×100(21)
其中:σz为植苗成功率;σy为移栽成功率;σq为取苗成功率。
移栽试验结果数据如表4所示,经过10次移栽试验,平均植苗成功率达到93.9%。在取苗成功率假设为100%的前提下,植苗成功率未达到100%的主要原因在于取苗成功之后还存在推苗过程。在该过程中,如果钵苗没有以较好的姿态落入栽植嘴中,会直接影响植苗效果,导致移栽失败。
综上所述,移栽失败的原因主要有:a)漏栽。取苗机构在推苗阶段未能成功将钵苗推入栽植器中,存在钵苗叶子挂在取苗机构上的情况。b)倒伏。在取苗机构推苗后,钵苗由于与导苗杯存在碰撞,影响了钵苗下落的姿态,使其落入栽植器时钵苗基质不再朝下。c)埋苗。垄面高低不平,部分钵苗栽植过深时会被覆土机构的覆土过程掩埋。
青菜密植移栽照片如图19所示,移栽密度超过70株/m2,从图中可以看出,除去个别漏栽、倒伏、埋苗的情况,整体效果满足青菜移栽农艺要求,表明该非圆齿轮行星轮系八行植苗机构具备可行性及实用性。
6结论
本文为实现青菜钵苗的机械化高效移栽作业,基于青菜钵苗移栽的株距行距农艺要求,提出了一种旋转式非圆齿轮行星轮系八行植苗机构。通过开展非圆齿轮行星轮系的运动学建模与分析、参数优化、植苗机构的虚拟样机仿真和田间试验等研究工作,得到的主要结论如下:
a)借助编写的植苗机构辅助分析与优化设计软件,通过人机交互的方式获得了一组最优的机构参数,此时设计株距为110 mm,满足青菜移栽的小株距要求。通过横向连续布置八个栽植器实现八行同步植苗,此时设计行距为110 mm,满足青菜移栽的小行距要求。
b)开展了植苗机构三维模型的虚拟样机仿真,并将仿真轨迹和理论轨迹进行了对比,验证了植苗机构设计的正确性。
c)进行了实物样机的田间移栽试验,在作业转速为15 r/min、前进速度为55 mm/s的情况下,平均植苗成功率达到了93.9%,移栽密度超过70株/m2,满足青菜小株距小行距移栽的农艺要求,验证了该植苗机构的实用性。
本文为蔬菜钵苗密植移栽机植苗机构的研发提供了理论和试验依据,从而推动密植型蔬菜机械化移栽的进程。
参考文献:
[1]郭雷,于建,李爱英.有机蔬菜种植技术要点及其发展对策[J].种子科技,2022,40(19):74-76.
[2]王琪琛,張寒波,齐褀,等.青菜中高密度机械化移栽技术试验初报[J].农业开发与装备,2018(10):155-156.
[3]周海丽,杨伟,俞高红,等.蔬菜钵苗移栽机开沟式多杆植苗机构优化设计与试验[J].农业机械学报,2023,54(3):79-86.
[4]赵晋,黄赟,潘松,等.江西省蔬菜移栽机械化现状与发展分析[J].中国农机化学报,2020,41(10):61-65.
[5]崔志超,管春松,杨雅婷,等.蔬菜机械化移栽技术与装备研究现状[J].中国农机化学报,2020,41(3):85-92.
[6]Liu J D, Cao W B, Tian D Y, et al. Kinematic analysis and experiment of planetary five-bar planting mechanism for zero-speed transplanting on mulch film[J]. International Journal of Agricultural and Biological Engineering,2016, 9(4): 84-91.
[7]王琪琛,夏焕,夏海荣,等.青菜移栽机选型与试验分析[J].长江蔬菜,2020(1):11-13.
[8]俞高红,王磊,孙良,等.大田机械化移栽技术与装备研究进展[J].农业机械学报,2022,53(9):1-20.
[9]李林林,邓干然,林卫国,等.作物移栽机械栽植机构发展现状与趋势[J].现代农业装备,2022,43(1):2-7.
[10]黄前泽.钵苗移栽机行星轮系植苗机构关键技术研究及试验[D]. 杭州:浙江理工大学,2013:59-60.
[11]徐乐辉.大株距旋转式行星轮系蔬菜钵苗栽植机构的优化设计与试验[D]. 杭州:浙江理工大学,2015:12-14.
[12]吴彦强,侯加林,黄圣海,等.自走式高密度智能辣椒移栽机的研制[J].农机化研究,2020,42(4):72-76.
[13]汪应萍.小株距高密度植苗机构的设计与试验[D]. 杭州:浙江理工大学,2022:15-16.
[14]俞高红,王系林,刘建刚,等.蔬菜钵苗密植移栽机多行取苗机构设计与试验[J].农业机械学报,2023,54(1):94-103.
[15]周海丽,刘建刚,俞高红,等.蔬菜移栽机斜齿轮-非圆齿轮行星轮系取苗机构研究[J].农业机械学报,2023,54(8):77-86.
[16]王磊,孙良,徐亚丹,等.基于遗传算法的三臂轮系式栽植机构多位姿运动综合[J].农业机械学报,2022,53(6):70-77.
[17]俞高红,廖振飘,徐乐辉,等.大株距行星轮系蔬菜钵苗栽植机构优化设计与试验[J].农业机械学报,2015,46(7):38-44.
[18]Reza M N, Islam M N, Chowdhury M, et al. Kinematic analysis of a gear-driven rotary planting mechanism for a six-row self-propelled onion transplanter[J]. Machines, 2021,9(9):183.
[19]廖宜涛,张百祥,郑娟,等.气力针式行星轮系窄行密植精密排种器设计与试验[J].农业机械学报,2022,53(11):86-99.
[20]许春林,吕志军,辛亮,等.全自动草莓钵苗移栽机构优化设计与试验[J].农业机械学报,2019,50(8):97-106.
[21]周永清,贺亮,顾林.基于虚拟样机的超级稻高速插秧机分插机构参数优化[J].机械设计与研究,2019,35(6):62-66.
[22]Liu F, Hu J P, Huang Y S, et al. Design and simulation analysis of Transplanters planting mechanism[C]∥Computer and Computing Technologies in Agriculture Ⅳ: 4th IFIP TC 12 Conference, CCTA 2010, Nanchang, China, October 22-25, 2010, Selected Papers, Part I 4. Springer Berlin Heidelberg, 2011: 456-463.
[23]吴国环,俞高红,叶秉良,等.行星轮系水稻钵苗移栽机构正反求设计方法研究[J].农业机械学报,2020,51(2):85-93.
[24]黄佳辉. 行星轮系植苗机构的设计与试验[D]. 杭州: 浙江理工大学,2020:21-22.
[25]俞高红,李成虎,汪应萍,等.小株距高密度蔬菜植苗机构设计与试验[J].农业机械学报,2023,54(3):96-105.
[26]顾小小,朱春燕,成松松.上海市绿叶菜移栽种植模式及移栽设备应用情况探讨[J].农业工程技术,2022,42(25):39-43.
(责任编辑:康锋)
收稿日期: 2023-09-21网络出版日期:2023-12-12网络出版日期
基金项目: 上海市科技兴农项目(沪农科创字(2021)第4-1号);国家“十四五”重点研发项目(2022YFD2001800);浙江省科技厅重点研发项目(2022C02002)
作者简介: 鲍李旭(1999—),男,安徽巢湖人,硕士研究生,主要从事农业机械设计方面研究。
通信作者: 俞高红,E-mail:yugh@zstu.edu.cn
