一种基于汽车姿态及轨迹的道路运行风险辨识研究方法
2024-03-22栗权钟周宇航王赢正于涛槊冯美轩
栗权钟 周宇航 王赢正 于涛槊 冯美轩
摘 要:道路是城市交通的载体,但在其使用过程中不可避免地会出现坑洼、凸起、障碍物等路面损坏,且不能被相关部门及时发现、处理。严重影响运输效率和出行安全。在对国内外研究现状进行综合分析和评价后。本项目考虑利用车载三轴加速度传感器对路面坑洼和凸起进行检测,通过开展实车实验收集车辆行驶的三轴加速度信号、速度信号和GPS信号,并开发异常路面的检测算法,该算法对坑洼和凸起的检测率达到80%以上,误报率10%以下,取得了较好的效果。同时本项目创新性考虑到部分司机面对障碍物会绕行,因此可利用汽车绕行参数检测路面障碍物。绕行时车辆主要出现的异常参数为四轮转弯半径的变化。项目组采用驾驶模拟器,收集数据,采用神经网络算法进行检测。通过四轮转弯半径,得到障碍物长度和宽度。该算法对障碍物尺寸的预测误差低于0.1m。通过车载采集终端获取到上述异常路面数据后,结合高精度GPS装置将这这些异常的位置信息通过车联网服务平台实时上传到交通管理部门的后台,使他们及时修补异常路面,提高运输效率。并可以在电子地图上标注这些异常点,为居民选择出行路线提供参考,避开这些损坏路面,提高出行安全。
关键词:路面质量检测 加速度传感器 转弯半径 神经网络 车联网
1 引言
道路是城市交通的载体,但在其使用过程中不可避免地会出现裂缝、坑槽、沉陷、表面破损等路面病害,这些道路损坏问题不仅会对交通正常运行带来不便,同时还会对车辆本身造成诸多影响,如:悬架的压力会陡然增大导致悬架损伤;车窗的负荷增大,导致车窗的升降系统损坏;轮胎鼓包开裂、轮辋变形,底盘磕碰等。
随着经济的发展和汽车保有量逐年提升,据统计,在中国每年大约有七万人死于交通事故,这使得中國道路成为了世界上最危险的道路之一。当然这是多种因素造成的结果,其中因路面异常造成的交通安全事故是道路安全问题中不容忽视的一环。
尽管道路管理部门会定时对路面破坏或者障碍物进行修补与清理,但是由于相关消息不能及时的汇报,路面上仍然会存在坑洼以及障碍物尚未处理的问题。
因此通过采集不同车辆的运行姿态(颠簸等),或者车辆对某地的绕行轨迹的方法,实时上报给道路管理部门及时采取行动,就可以减少驾驶员以及其他道路通勤者的安全隐患,同时也有利于道路交通的秩序维护和流畅通行。
2 国内外研究现状
当前国内外路面检测的方法多是围绕地物检测展开的,其方法主要分为三个方面:
2.1 基于专业设备的路面异常变化检测方法
这类方法使用激光扫描仪,探地雷达等专业设备采集路面信息,并分析所采集数据的变化情况以识别路面异常变化。Wang 等人通过采集路面三维数据,模拟平整状况下路面的等高线,计算实测数据和模拟等高线的差值,设置路面异常变化的深度阈值,将大于深度闽值的区域判定为路面异常变化。
2.2 基于图像处理的路面异常变化检测方法
基于图像处理的方法主要使用相机采集路面图片或者视频,分析路面异常变化。Christan 等人录制道路视频,使用实时算法提取出现问题的路面帧,利用缺陷识别算法识别出这些地物的类型,通过使用缺陷属性算法判定路面异常对路面平整性的影响程度。
2.3 基于移动传感器的异常变化检测方法
这类方法主要是使用搭载多传感器的手机或者单片机为载体,采集路面信息井检测路面路面异常变化情况,该方法可细分为基于单片机系统的移动传感器自动检测方法和基于智能手机的的自动检测方法。基于移动传感器的异常变化检测方法使用移动传感器或者搭载了移动传感器的设备作为信息收集的载体,进步减少了人的工作,甚至可以全自动采集数据然后终端对数据进行分析。
综上,使用专业设备对路面进行检测,得到的结果具有较高的精准度,然而由于需要专业设备和专业人员,数据采集成本高且检测效率较低;基于图像的方法获在路面地物检测方面可以达到较好的效果,并且数据获取较便捷,数据覆盖范围广,但是采集的图像易受到光照和天气的影响,存在一定局限性;基于移动传感器的自动检测方法具有全天候检测的优点,数据更易获取且来源广泛且检测结果准确率较高。
3 设计原理
3.1 数据采集终端
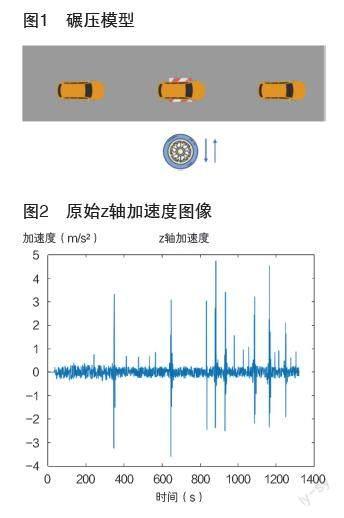
3.1.1 车辆碾压坑洼或凸起条件下识别
通过在特定道路开展实车实验,收集三轴加速度传感器,速度传感器和GPS装置获取数据,而后利用卡尔曼滤波对数据进行预处理,之后利用算法输入三轴加速度、速度信号,将坑洼与猛关车门、紧急制动、高速行驶时小石头引起的加速度冲击、减速带,公路连接带等情况区分开,最后只保留坑洼引起的异常加速度,并结合GPS确定位置。
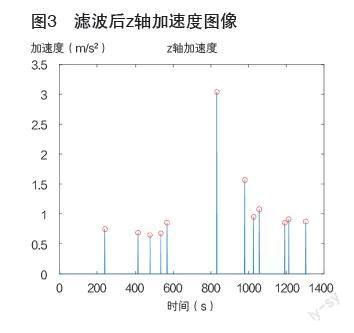
最后保留的这些点即为滤波模型检测的坑洼,共12个。导出它们的横坐标如下:242、412、476、534、566、832、980、1027、1056、1192、1213、1303。
与原始数据点的GPS位置、通过时间对比后,驶过的13处坑洼共检测到11处,误报为坑洼的1处,为下水道井盖。
通过实验,该系统坑洼检测率达到84.62%,误报率为8.33%,取得了较好效果。对于将下水道井盖误报为异常路面这个问题,通过加速度传感器将其与坑洼区分开是极其困难的,比较好的解决方法是通过交通管理部门获取这些井盖的分布位置,在后台建立黑名单,自动删除这些点。
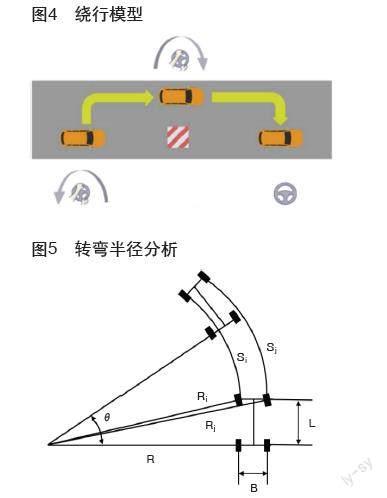
3.1.2 车辆绕行障碍物条件下识别
绕行时车辆主要出现的异常参数为四轮转弯半径的变化。项目组采用驾驶模拟器,收集数据,采用神经网络算法进行检测。通过四轮转弯半径,得到障碍物长度和宽度。
该算法对障碍物尺寸的预测误差低于0.1m,取得了较好的结果。
采用驾驶模拟器对实际情况进行仿真:在道路上设置多个不同大小的障碍物让不同的驾驶人对同一障碍物进行多次绕行操作,提取与绕行关联数据:车速、方向盘转角和左右前轮的转速。
在分析数据时,我们发现汽车的绕行轨迹与障碍物的尺寸有关,因此我们提炼出一下两个特点:
①绕行轨迹椭圆的轴比与所绕过障碍物的长宽比相同;
②车辆绕行时四轮的转弯半径均不同。
特点1分析:
椭圆长轴=车辆横向位移,椭圆短轴=车辆纵向位移,轴比(AR)=横向位移/纵向位移=障碍物长度/障碍物宽度。设质心速度为v,横摆角为θ,则可得到:
横向位移=,
纵向位移=,
则:。
特点2分析:
两前轮所走过的距离分别为:Si=Ri*θ,Si=Ri*θ
R是汽车后轮的转弯半径,B是左右车轮的间距,L是汽车的轴距,可得:
k为左右前车轮所走过的距离之比,则:
通过变换可提取后轮转弯半径:
综上四轮转弯半径为:
转弯半径之间的比值为:
选定样本数据集
设方向盘转角为φi,m为最小变化角度,如果:
则记为绕行数据开始,当:
则记为绕行数据截至。
分离绕行样本
排除正常转弯干扰:设方向盘转角为φi n为阈值,如果:
所获的样本数据段为汽车绕行障碍物时的数据段。
采用神经网络预测障碍物尺寸
BP神经网络采用类似于“黑箱”的方法,通过学习和记忆,找出输入、输出变量之间的非线性关系,最终得出合理的答案与结果。传统BP神经网络网络收敛速度慢,且容易陷入局部最优解。
我们采用鲸鱼优化算法优化BP神经网络,鲸鱼优化算法是2016年由澳大利亚格里菲斯大学的学者提出的一种新型群体智能优化算法。但传统的鲸鱼优化算法数据计算速度较慢,且计算结果容易是局部最优解。因此,我们做了进一步改进:
采用Cubic混沌映射序列初始化位置向量,公式如下:
从而更好模拟座头鲸随机分布的状态。
采用适应进化权重调整,公式如下:
从而使鲸鱼具有较高的探寻能力。
改进鲸鱼优化算法可以优化神经网络的权值和阈值,进而对神经网络的整体结构进行优化,使其更符合此应用场景,有助于构建转弯半径之比与障碍物尺寸的非线性关系,进而取得更精准的预测结果。
我们采用的神经网络为6输入1输出结构,输入为转弯半径之间的比值为:
输出为障碍物长度,则障碍物宽度y=AR*x。
从结果中可以看到CIWOA优化的BP神经网络尺寸预测误差更小,尺寸预测更准确。
3.2 数据传输模型
该系统共包括车辆采集终端,GPS卫星,移动公共网,网关,后台服务器5部分。通过车载采集终端获取到上述异常路面数据后,结合高精度GPS装置将这这些异常的位置信息通过车联网服务平台实时上传到交通管理部门的后台,使他们及时修补异常路面,提高运输效率。并可以在电子地图上标注这些异常点,为居民选择出行路线提供参考,避开這些损坏路面,提高出行安全。
4 结语
随着网联环境的不断优化和5G、电子地图技术、智能交通系统的不断发展以及人们对城市道路表面质量的关注,对损坏路面的及时发现和维修将极大提高市民出行方便和运输效率,具有重要研究意义。
本系统通过车载加速度传感器和GPS结合,及时检测路面凸起和坑洼。并创新提出利用车辆异常绕行参数,实现对路面障碍物的检测。未来可通过安装在出租车等车辆上构成基于分布式移动传感器的监测网络,应用前景光明。
参考文献:
[1]谢淑琦,王学成,周世英.汽车保险业务发展的影响因素一基于计量回归模型[J]中国市场,2021(14):56-57+66.
[2]王浩翔.融合轨迹与手机多传感器的路面异常变化检测方法研究,2021.
[3]晏华文.基于蓝牙的车轮力数据传输系统设计,2013.
[4]张志远.激光路面平整度检测系统研究.太原理工大学,2013.
[5]徐庆江.基于车载传感器的路面质量监测系统的设计和实现,2012.
[6]HustonDR,PelczarskiNV,EsserB,et al Damage detection in roadways with ground penetrating radar[Cy/8th International Conference on Ground PenetratingRadarISI] [s.n],2000:91-94.
[7]张子茹.基于车载PQCR-PSL传感器的路面损坏监测系统,2019.