无人机遥感技术在三维建模中的应用★
2024-03-14张巧玲赵燕伶郝旋捷
张巧玲,蒙 利,赵燕伶,郝 航,郝旋捷,张 辉
(自然资源陕西省卫星应用技术中心,陕西 西安 710000)
现代科技的快速发展,无人机遥感技术也取得了很大的进展,被广泛应用于测绘领域,显著提升了测绘生产效率和质量。本研究以某市为研究区,采用无人机摄影测量技术,利用Context Capture软件生成实景三维模型,为无人机摄影测量技术在数字化城乡发展中的应用提供实践依据和参考意义。
1 无人机倾斜影像三维建模关键技术
无人机倾斜摄影测量的三维建模关键技术包括影像匹配及特征提取、多视影像联合平差、多视影像密集匹配、纹理映射等。
影像匹配及特征提取是利用影像间的特征关系来实现对不同的影像进行整合。特征之间的联系需从影像中抽取出具有相同名称的特征元素,这些特征要素包含点特征、面特征与边缘特征,即影像中灰度变化急剧的部分。为了保证后期的影像融合和目标识别等工作,借助SIFT特征点检测,该算法是应用范围较广的特征点提取方法,是利用影像元素之间的相似度测量来实现图像的匹配,具有较好的运算速度与抗噪能力[1]。
多视影像联合平差不同于传统平差,需考虑平台搭载的不同镜头之间的遮挡及联系,利用影像的外方位元素进行特征点匹配,基于多视图几何原理,再利用地面像控点、匹配连接点及航摄相机的GPS/IMU信息等进行区域网平差[2]。多视角影像密集匹配是生成数字表面模型和三维模型的重要依据,是一种在多幅影像之间提取同名点的过程。多视影像具有丰富的角度和充足的影像信息,其覆盖范围大、分辨率高,可以利用冗余信息来校正错误匹配,并根据摄影死角提供信息。密集匹配关键在于快速准确地获取多视影像上的同名点坐标,为了保证精度,采用多匹配基元[3]。基于特征的影像匹配有较强的适应性和较高的匹配精度,是当前倾斜摄影测量软件中最常用的匹配技术。
纹理映射是增强模型视觉效果的关键技术[4],其实质是建立二维纹理空间点与三维空间物体表面点的一一对应关系,根据所获得的多角度地形的纹理信息来构造一个与纹理信息相匹配的网络,并通过设置适当的过滤条件和空间信息进行匹配,确保三角网中的每个三角形与纹理空间信息库中的纹理信息一一对应[5]。
2 三维建模
2.1 数据获取
1)无人机航测遥感。采用无人机航测遥感技术获取影像数据之前要收集所研究区域的资料、实地观测、航线设计、空域申请等工作[6]。本文采用DJI精灵4pro无人机进行航空摄影数据的采集,该无人机功能强大、飞行的稳定性强,执行任务时可实现快速装卸,能自动、智能且快速地获取空间地理信息要素,并且完成外业航飞的数据的处理[7-8]。此次飞行实际航摄相对高度为245 m、航向重叠为80%、旁向重叠为75%、影像总数为4 536张。
2)像控点布设。选择图像控制点时,应选择光控点的目标图像清晰,易于判断和立体测量,且尽可能为永久地物,并要求与周围地物颜色反差大,特征明显,如选在交角良好的细小线状地物交点、明显地物拐角点等位置,如道路交叉口、斑马线交角等。像控点选择点位应落地选刺;选刺点位优先选择高程不变的地面。
2.2 模型建立
1)导入数据。将无人机航空拍摄的影像数据、POS数据导入到Context Capture软件中,然后经控制点刺点后进行空中三角测量,如图1,图2所示。

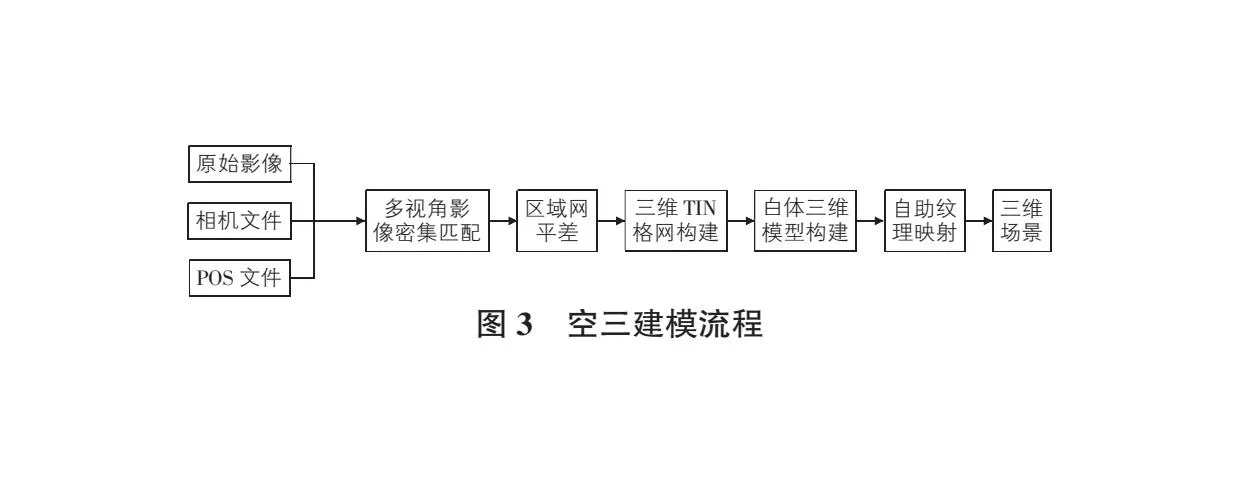
2)空三加密。为了能够将无人机倾斜摄影获取的单一无序的影像在空间中相互对齐统一,构建与真实状态下更加逼真的三维模型,需要进行空三加密解算,设置好参数信息,结合影像数据和POS数据对像点坐标进行加密,获取同名特征点的坐标,这些同名点将作为区域网平差的条件,获取每张影像的相机位置、姿态参数及密集的点云数据。空三建模流程如图3所示。
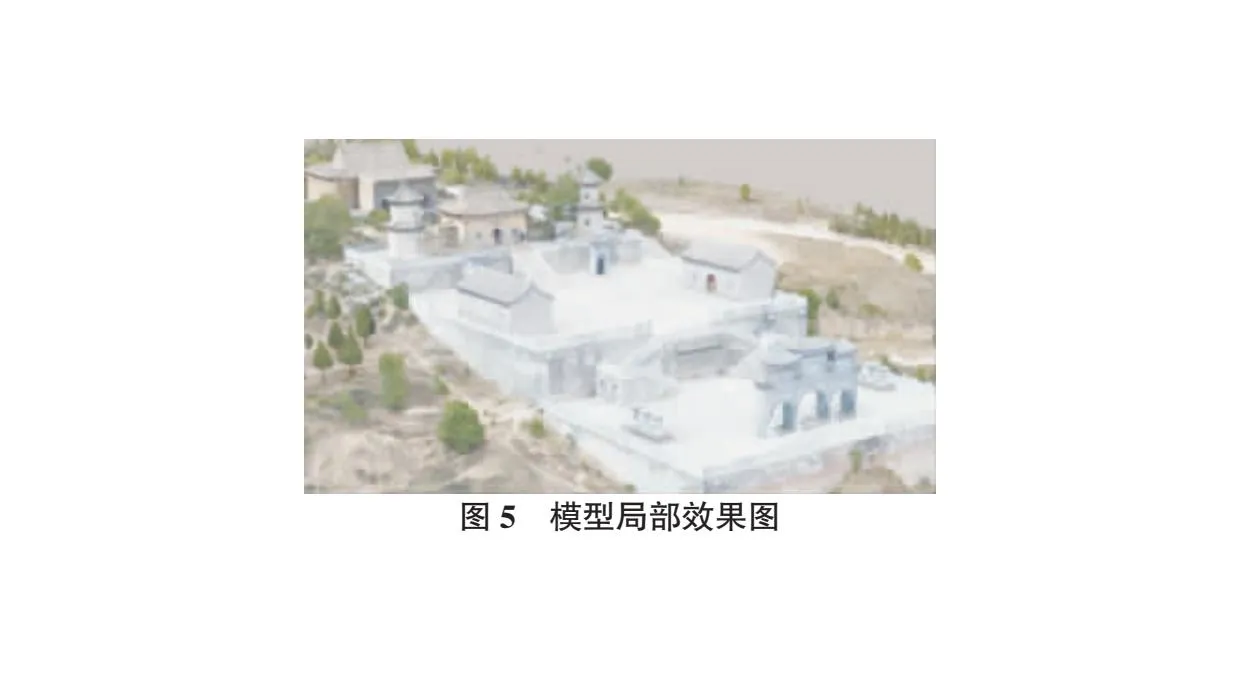
3)模型重建。利用空三加密后的密集点云构建TIN模型,生成具有三维信息的白膜模型;将影像数据进行归一化和增强处理后,Context Capture会计算出TIN模型中的每一个三角面片与影像的对应关系,将高分辨率的纹理映射给三维白膜模型,完成纹理贴图进而生成实景三维模型,完成三维重建。利用Context Capture进行三维重建后的实景三维模型如图4—图6所示,模型整体效果较好。


3 常见的影响模型质量的因素以及解决办法
3.1 影像预处理
影像质量包括影像的分辨率和清晰度,分辨率和清晰度足够高时,空中三角测量解算的成果的质量会比较高,得到的成果精度越高。对于有畸变的像片,会影响所建模型的效果,模型可能会出现扭曲、缺失等问题。利用MapMatrix软件进行畸变矫正,首先利用数码相机影像矫正;然后将需要矫正的影像添加进去,填写校正参数从而矫正。
3.2 像片选取
利用无人机倾斜影像三维建模不仅需要获取建筑物正面轮廓,还需要获取侧面轮廓以及所处的地理位置的实际情况,所以采集的数据量比较大(存在数据冗余现象),为了减少建模所花费的时间和尽量避免所建立的模型变形,应采取相应的措施。
1)可以根据人工选片的方法对像片进行筛选,剔除一些比较模糊或者有损坏的像片。2)首先编辑待研究区域获取的POS数据,保存并生成KML文件,然后将KML文件导入Google地球并编辑属性,挑选像片时,将航线与影像高度设置为“贴于地面”,然后根据所需区域周围的影像选择离它最近的影像,如图7所示。

3.3 纹理缺失及遮挡的处理
下图为研究区域的部分模型,从图8可以看出模型的纹理缺失且有遮挡。可以采用“外业补拍照片”的方式进行纹理修饰;处理后的影像如图9所示。

3.4 模型结构变形的处理
由于树干、电线杆等横截面积比较小,产生的特征点比较少,会出现模型有部分缺失的现象,树干缺失和电线杆变形分别如图10,图11所示。
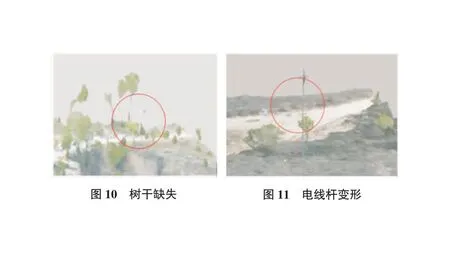
处理方法:将需要处理的部分模型的数据导入DPModeler中进行模型的精细化,对于模型有变形或者缺失的地方,进行模型的重建。在进行纹理映射时,如果模型的纹理模糊或缺失,利用PS处理,然后再导入DPModeler中纹理映射。处理后结果如图12,图13所示。

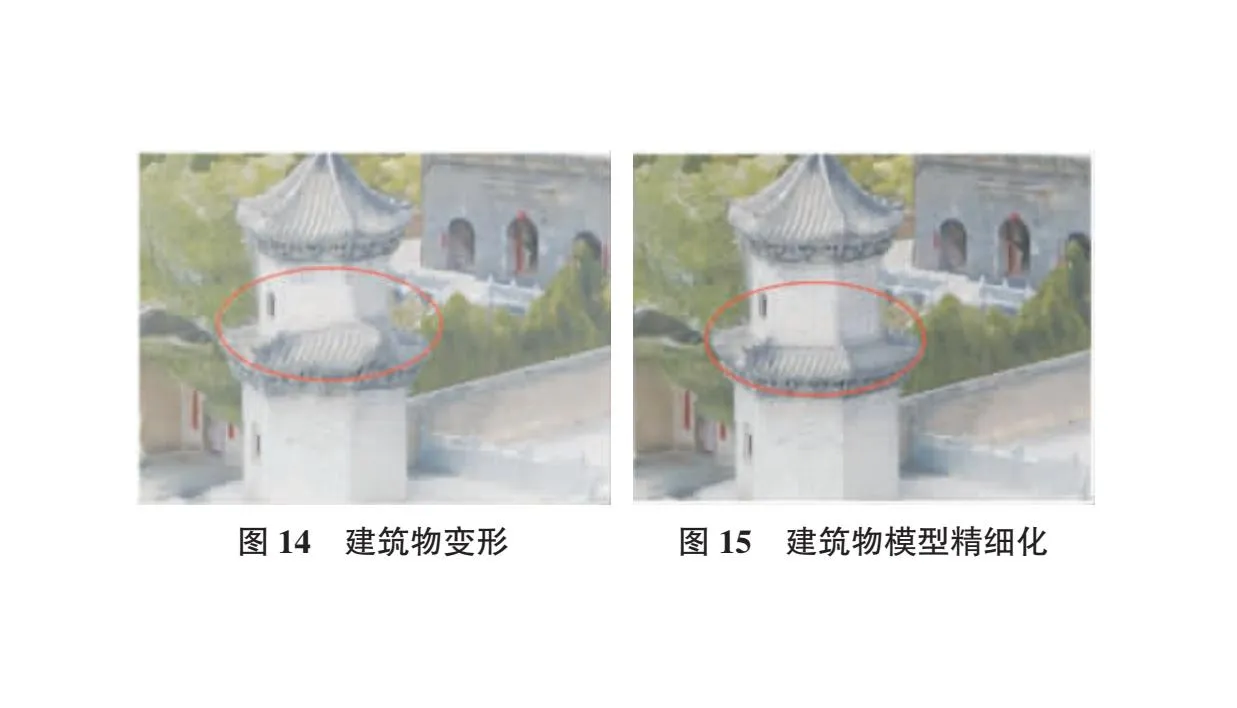
在空三加密时,由于像片丢失或者POS数据的质量问题而导致像片丢失,从而引起模型变形,建筑物变形如图14所示。处理方法:在空三加密前,对像片进行刺点的时候,应将像控点刺于预先布设好的像控点中心,对于处于边缘的控制点不进行刺点,且同一地物至少出现在三张像片上(满足条件的点尽可能都刺上)。处理后结果如图15所示。
4 模型精度评定
4.1 纹理精度评定
三维模型纹理精度的高低主要取决于获取影像的质量高低[9]。本文对于模型纹理精度评定主要是将所建立的模型和研究区实物进行目视观测对比,观察模型的纹理、结构等与实物是否存在色彩不一致、纹理模糊等问题。通过将模型与实物对比,模型纹理清晰,精度较高[10]。
4.2 位置精度评定
所建立的模型是否达到要求,可以与《三维地理信息模型数据产品规范》来进行对比,比如平面精度、高程精度等是否达到规范的要求[11]。
在研究区选取10个点,平面精度统计见表1。其中X方向中误差为±0.158 m,Y方向中误差为±0.176 m,平面坐标中误差为±0.231 m,模型平面精度满足精度要求。

表1 平面精度分析表 m
高度精度统计见表2,将外业中量测的实际高度和内业中量取模型的高度数据进行比较,分析模型的高度精度,中误差为±0.328 m,最大误差为0.2 m,模型的高度精度满足精度要求。
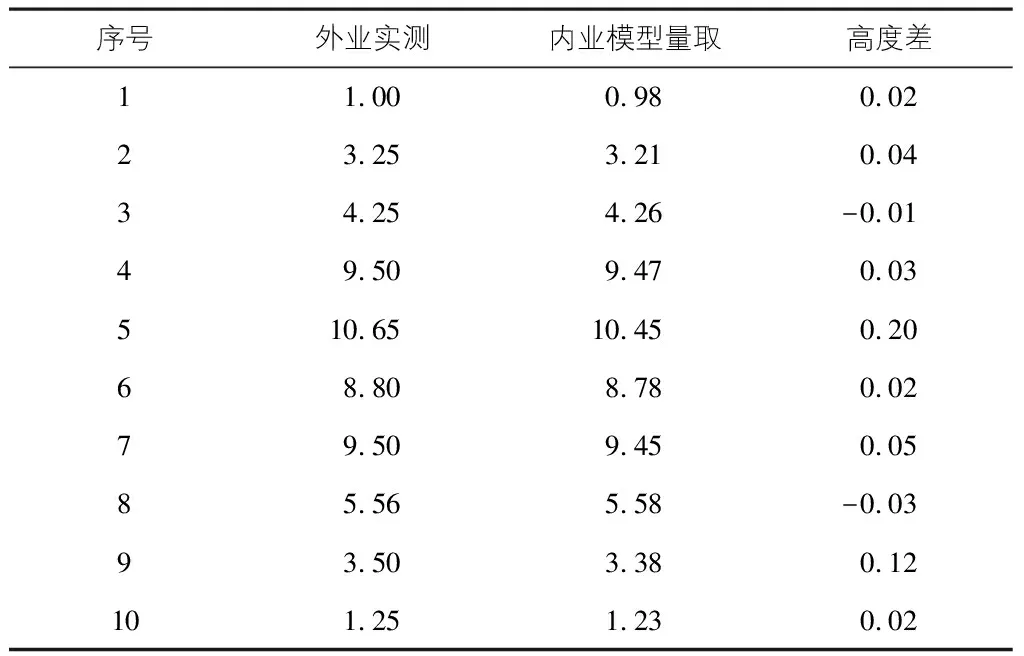
表2 高度精度分析表 m
将外业测量获取的控制点坐标和建立的模型上的相对应的控制点进行对比,具体结果见表3,模型中误差为0.103 m差值在合理范围内。
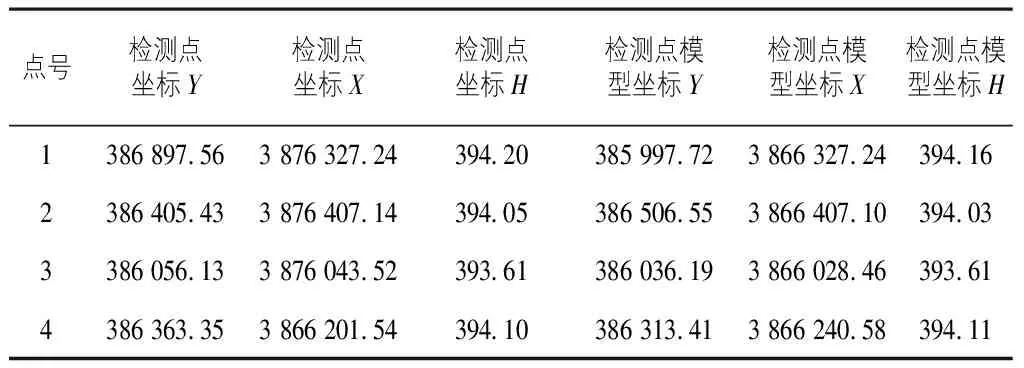
表3 模型精度评估表 m
5 结语
无人机遥感技术在三维建模中的应用是比较广泛的。在测绘领域,无人机遥感技术作为一种高新技术,其成本低、易操作、监测范围广、安全性高,该技术的应用可以确保测绘成果的准确性和可靠性。无人机倾斜影像三维建模是目前比较广泛的三维建模方式,提高了三维建模的效率。本文对无人机倾斜影像三维建模中常见的问题进行分析,并提出了对应的三维模型精细化处理方法,以期对无人机倾斜影像三维建模实践有借鉴作用。

