智能反射面辅助的MU-MISO车联网毫米波通信联合波束赋形
2024-03-07仲伟志万诗晴朱秋明林志鹏
何 艺 仲伟志* 万诗晴 朱秋明 林志鹏
(1.南京航空航天大学航天学院,江苏南京 210016;2.南京航空航天大学电子信息工程学院,江苏南京 210016)
1 引言
随着无线通信的不断发展,智能交通系统的建设已成为智慧城市建设进程中非常重要的环节,其中,车联网作为智能交通系统中必不可少的组成部分[1],提供各项形式服务,例如:自动驾驶和智能交通管理等[2]。同时,6G 无线网络将是满足智能交通系统大规模数据传输需求的关键推动因素,可促进车辆对车辆(Vehicle-to-Vehicle,V2V)和车辆对基础设施(Vehicle-to-Infrastructure,V2I)稳定通信的实现[3-4]。
近年来,毫米波(mmWave)通信作为一种能够满足B5G 和6G 无线通信系统高速率和低延迟需求的领先技术,已引起研究者广泛关注。由于毫米波段存在严重的路径损耗现象,因此,毫米波通信广泛采用大规模阵列天线等技术,以克服传输损耗,提高频谱效率[5]。大规模阵列天线窄波束的高定向性,使毫米波通信多为视线(Line of Sight,LOS)链路,而LOS 路径的存在和毫米波高频特性,使路径极易被遮挡,这将导致通信质量高度依赖于无线环境的布局,限制了网络覆盖。为解决这一问题,需要一种技术来保证车辆在存在无线链路阻塞的高动态场景中的通信质量。
最近,智能反射面(Intelligent Reflecting Surface,IRS),也叫做可重构智能表面(Reconfigurable Intelligent Surface,RIS),作为一种可解决高频段通信阻塞问题的技术,被引入无线通信系统,IRS由一种被称作超材料的新兴材料构成[6-7],IRS 通过反射入射到其表面的信号,来增加波束覆盖范围和扩大系统通信容量[8]。IRS 所有反射元素的相移均可通过可编程PIN 二极管调节,IRS 的反射系数通过智能控制器控制[9],因此,其反射波束的方向和形状均可自主调节[10-11]。在车联网场景下,当基站与车辆用户之间的LOS 链路被阻塞时,可利用IRS 将基站出射信号反射给车辆用户,通过建立虚拟LOS 通信链路的方式来提高通信质量。相比于阵列天线,IRS可采用更少的射频链,因此,其功耗和硬件成本更低;此外,IRS 可以以轻而紧凑的尺寸制造,低成本和小尺寸的特点有利于将其安装在建筑物和路标的表面,实施密集部署。
虽然将IRS 应用于车联网会带来许多优势,但同样也存在一些挑战,如IRS最佳的相移矩阵设计、链路的信道状态估计等,此外,还需要考虑基站的发射功率等约束条件。针对这些挑战和约束,研究者做了大量的研究。
文献[12]研究了IRS 辅助的MISO 通信系统,在总传输功率约束下,考虑了基于最优线性预编码器(OLP)的最大化最小SINR 问题。提出了一种针对渐近OLP 参数的确定性逼近方法,从而完成IRS相移矩阵的优化。文献[13]中也考虑了一个MISO通信系统,提出了基于最小均方误差(MMSE)的信道估计和反射波束赋形,在最大化最小SINR 约束下,基于OPL 联合优化了基站预编码矩阵、功率分配和IRS相移矩阵。文献[14]提出了一种基于交替优化的算法,以实现联合优化基站和IRS 波束赋形的目的,从而减轻通信单元间的干扰。该算法利用二阶锥规划解决了基站波束赋形问题,利用半定松弛方法解决了IRS反射波束赋形问题。文献[15]考虑了IRS辅助的可执行MIMO,MU-MISO通信的双工雷达系统(DFRC),提出了一种基于乘数替代方向法(ADMM)和优化最小化(MM)方法的算法框架来解决联合优化问题。不同于以上文献的约束条件,文献[16]设计了一个风险规避优化问题,以最大化网络平均数据率和车辆用户数据率方差的差值作为联合优化波束赋形矩阵的目标函数。优化过程分为两个阶段,第一阶段采用分解松弛预编码优化方法(DRPO),获得最优基站预编码矩阵和IRS相移矩阵的初步结果。第二阶段采用深度强化学习方法,利用IRS 相移矩阵的初步结果初始化经验池,在信道不确定性条件下动态调整IRS 相移矩阵。文献[17]提出了一种基于交替优化(AO)框架的有效迭代算法,在最小化所有数据流的均方误差(MSE)期望的约束下,考虑了MIMO 收发器和IRS反射矩阵的联合设计。其中每个子问题利用优化最小化(MM)技术得到一个封闭的最优解,并且提出了一种改进的黎曼梯度上升(RGA)算法,用于离散IRS 相移优化。基于目前的研究现状,本文针对MU-MISO 车联网通信系统,在基站发射功率的约束下,以最大化最小的SINR 为目标,结合半定松弛方法和随机化过程,提出分解目标函数,采用交替迭代优化算法,实现联合波束赋形的方法,并通过仿真实验验证了该方法的有效性。
2 系统模型
IRS 辅助的MU-MISO 车联网通信系统如图1所示,该系统包含1 个基站,1 个智能反射面以及K个车辆用户(K>1)。基站位于路边,其发射端配备一个均匀线阵天线(Uniform Liner Antenna,ULA),包含M个天线阵元。智能反射面配备N(N=n2,n>1)个无源反射单元,安装于基站对面的高层建筑物的外墙,以协助建立通信链路。车辆用户均携带1 个全向天线,作为信号接收端。在该系统中,由于IRS被放置于较高的位置,假设基站与IRS,每个车辆用户与IRS 之间都存在直接视线通信链路。此外,由于V2I 场景的高动态性,基站与车辆用户之间的直接链路随时可能被阻挡,故视线路径不一定时时存在。

图1 IRS辅助的MU-MISO车联网通信系统示意图Fig.1 Illustration of IRS-aided MU-MISO vehicle-toinfrastructure network communication system
IRS 通过一个可编程控制器连接到基站,故基站能够管理IRS 中所有无源反射单元的相移系数。IRS的相移矩阵可表示为
基站与IRS之间的信道由G∊CN×M表示。由于BS-IRS链路包含了视线路径,故将其建模为一个莱斯衰落信道
IRS 与第k个车辆用户之间的信道由fk∊CN×1表示。由于IRS-kth车辆用户链路包含了视线路径,故也将其建模为一个莱斯衰落信道
其中,l(d)表示路径衰落,d为通信距离,κ1,κ2表示莱斯衰落因子,GLOS,fkLOS表示信道的视线路径部分,GNLOS,fkNLOS表示信道的非视线路径部分,其中,每一个元素是独立同分布的,服从均值为0,方差为1的复高斯分布。
基站与第k个车辆用户之间的信道由hk∊CM×1表示。由于V2I 场景的高动态性,基站与车辆之间的LOS路径随时可能被阻挡,故BS-IRS-VU链路为车辆用户与基站通信的主要信道。因此,仿真中令hk的强度比主要通信信道强度低20~30dB,以更加准确的模拟基站与车辆之间的LOS 路径时有时无的情况。hk中每个元素都是独立同分布的,均服从均值为0,方差为σ2的复高斯分布。
hΘ,k∊CM×1为第k个车辆用户和基站之间的信道,可表示为直接信道和IRS反射信道之和,记为
因此,接收信号可表示为
其中,wk∊CM×1表示第k个车辆用户的基站波束赋形向量,sk表示基站向第k个车辆用户发送的信号符号,nk表示加性高斯白噪声(additive white Gaussian noise,AWGN),并 且nk~CN(0,),其方差表示为。
ΗΘ,k∊CM×M表示由IRS 辅助的第k个车辆用户与基站的复合对称MISO信道矩阵。根据式(4),可将其定义为
因此,第k个车辆用户接收到的信干噪比(SINRk)可定义为
3 面向联合波束赋形的交替迭代优化算法
面向联合波束赋形的交替迭代优化算法首先将优化问题分解为两个SDR子问题,第一个子问题可描述为:求解K个车辆用户中,最小SINR 的最大值以及对应的基站波束赋形矩阵;第二个子问题可描述为:求解满足上述条件的IRS相移矩阵。随后,通过交替优化方法迭代求解,直到满足迭代结束条件。
3.1 优化问题模型
该优化问题的主要目标是在基站总传输功率P的约束下,使所有K个车辆用户的最小SINR 最大化,通过最大化K个车辆用户中最小的SINR,确保了所有车辆的通信质量。根据式(7),可将带约束条件的优化问题建模为
依据文献[18],[19]中的框架,引入一个正实数辅助变量t,作为最坏情况下的SINR 的下界,由此可将问题(P1)重写为
问题(P2)较问题(P1)更为灵活,因此,后续将在问题(P2)的基础上进行分解,再通过交替优化的方法来解决优化问题。
3.2 SDR子问题
问题(P2)可以分解为两个子问题来完成优化,即求解基站波束赋形矩阵和求解IRS相移矩阵。
(1)基站波束赋形矩阵优化:
为得到基站波束赋形码本W和t的优化值,需要保持相移矩阵Θ不变,同时,可通过SDR 方法来近似基站波束赋形矩阵优化问题。为了将问题转化为SDR 问题,引入变量,∀k∊{1,…,K},由 其表达 式可 知,‖wk‖2=trace(Xk)。因 此,可将SDR子问题写为
因为秩-1 约束(10d)的存在,(P2a)是一个非凸问题,但该约束条件可以进一步放宽。然而,由于不等式约束(10a)的存在,该问题仍然是拟凸问题。因此,该问题是否可行有解,取决于t的最大值。二分搜索算法的算法流程如表1所示。

表1 二分搜索算法Tab.1 Bisection search algorithm
λl,λu分别表示下限阈值和上限阈值,δ表示迭代步长。如果问题是可行的,则更新λu=δt,λl=t,否则λu=t。将δ设定为一个大于1的常数,因此,当问题可行时,δ能够增加上界。假设问题(P2a)放宽秩-1约束(10d)后状态为可行时,对应的最优解为t*。显然,在二分搜索算法进行过程中,如果步骤4能得到给定t对应的可行解,步骤5判断得到目前问题状态为可行,则说明步骤3中给定的t≤t*,相反,若在给定t的条件下,问题不可行,则说明步骤3中给定的t>t*[14]。因此,该问题可以通过检查在任意给定t条件下的可行性,并结合二分搜索算法解决。其中,二分搜索算法的目的是在保证问题可行有解的情况下,迭代求得最优解t*以及对应的基站波束赋形矩阵相关变量。可行性验证可以在基于MAΤLAB 的CVX 软件包中得到解决[20],通过该软件包可以检查给定参数下问题是否可行,并给出目标问题可行状态下的可行解。
求解出t和Xk,∀k的最优值后,由于可能为高秩,因此需要通过随机化方法randC[21],求解的秩-1 解,即问题(P2a)的可行解,次优解。随机化是一种从SDR 解中提取二次约束二次程序(QCQP)近似解的方法。在文献[22]的MIMO 探测实例中,随机化方法的位误差概率远低于其他MIMO 探测器方法,接近不存在MIMO 干扰时的误码概率,说明随机化方法近似精度高,能得到可靠的结果。随机化方法randC 具体过程如下,首先对进行特征分解计算,即UΣUH=,其中,Σ为特征值作为对角线元素组成的对角矩阵,U为特征值所对应的特征向量组成的矩阵。随后,通过公式计算得到对应第k个车辆用户的基站波束赋形向量。其中,zk∊CM×1的元素是0 均值,单位方差的复高斯随机变量。
(2)IRS相移矩阵优化:
第二个SDR 子问题是寻找相移矩阵Θ的可行性检查问题。基于第一个子问题求解出的t和W,IRS相移矩阵优化问题可写为
为了解决上述问题,需要将其改写为近似SDR问题,因此,需要引入辅助变量v,该变量为复数,并且|v|=1。由此可定义ϕv为
3.3 交替迭代优化算法
交替迭代优化算法是以交替的方式轮流解决问题(P2a)和(P2b),并结合迭代计算的方式,实现最大化所有车辆用户中最小SINR 的目标,即实现了满足该目标的联合波束赋形优化。交替迭代优化算法的算法流程如表2所示。第一步是初始化相移矩阵Θ(0),在[0,2π]范围内随机选择Θ(0)的相移系数θn。利用该随机相移矩阵,通过二分搜索算法求解问题(P2a),再通过随机化过程得到基站波束赋形矩阵W=[w1,…,wk]和t。由于randC 方法存在一定的误差,会导致该W条件下,t可能并非为问题(P2a)的可行解,因此需要保持W固定,在满足(10a)的条件下,再次通过二分搜索算法更新t。随后,利用求得的W和t解决可行性问题(P2b),再次通过随机化过程得到Θ。第一次迭代以后的每次迭代都需要利用上一次迭代计算出的Θ更新信道ΗΘ,k。交替迭代优化过程会持续进行,直到连续t值之间的差值占比小于迭代停止精度ε2。
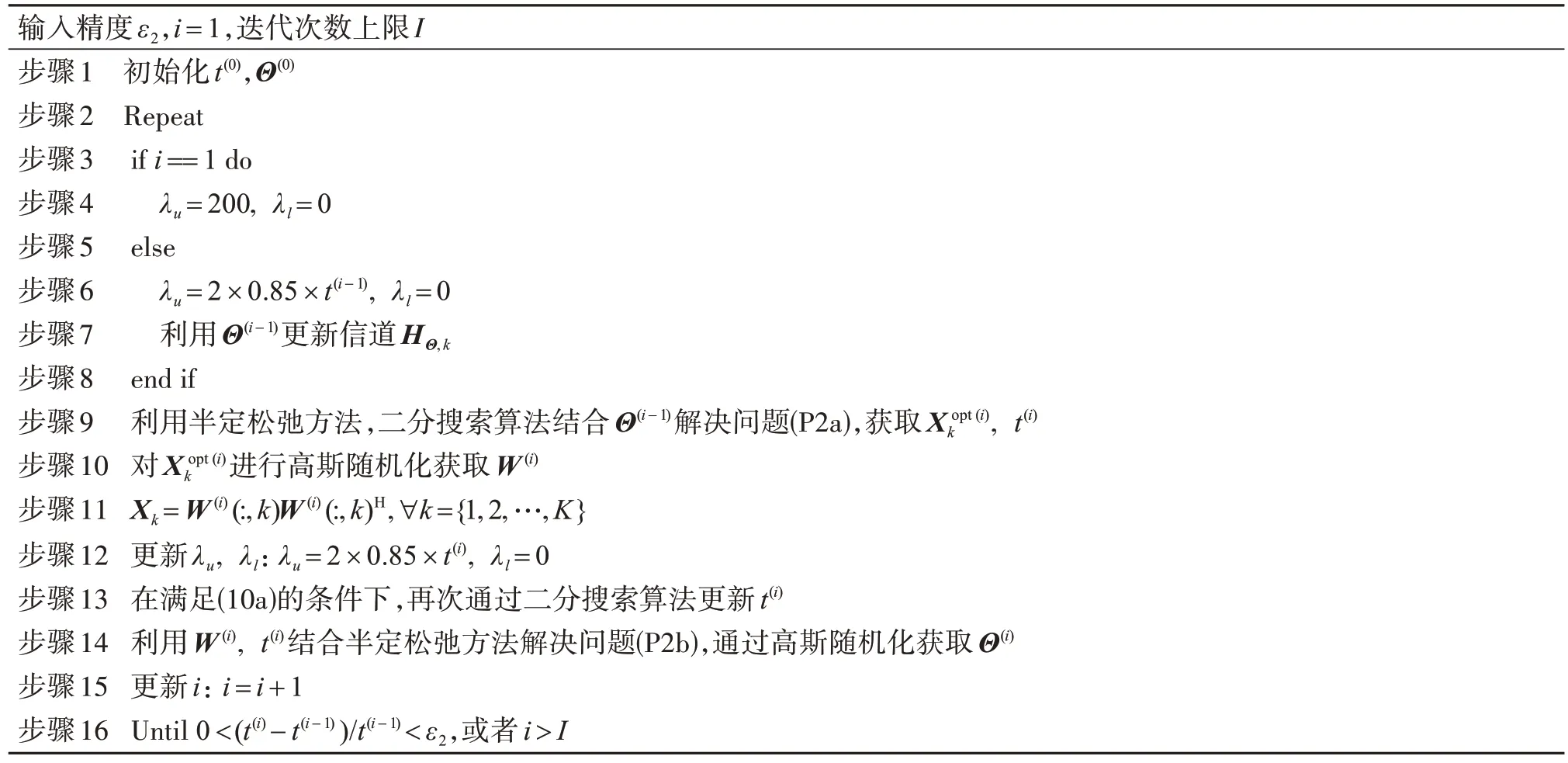
表2 交替迭代优化算法Tab.2 Alternate iterative optimization algorithm
4 实验仿真
为了验证本文采用的基于半定松弛问题的交替迭代优化算法的性能,对E[min(SINRk)]和基站的总频带利用率进行了仿真对比。其中,E[min(SINRk)]为所有接入网络的车辆用户中最小SINR 的期望。基站的总频带利用率(Sum-rate)定义为
仿真实验设置如图2 所示,研究区域内包含两条车道,每条车道宽5 m,长100 m。假定基站安装在路段的中心位置,IRS 被放置在基站对面的建筑物外墙上,均面向车道。

图2 仿真实验设置说明图Fig.2 Illustration of simulation experiment settings
通用的仿真参数如表3所示。V2I场景是高动态的,车道上随时会存在阻挡物,包括静态阻挡物(建筑物,广告牌等)和动态阻挡物(卡车,大巴等),因此,莱斯衰落因子κ某些情况下会较低。对于通信距离为d的任何链路,路径损失建模为l(d)=Crd-α,其中α为路径损失指数[23],Cr为单位距离的参考路径损失[24]。

表3 通用仿真参数Tab.3 Generic simulation parameters
图3,图4 在同一仿真参数下得到,该仿真实验设定基站阵列天线阵元数M=8,车辆用户数K=2,IRS无源反射单元个数N={16,25,36}。

图3 发射功率约束下交替迭代优化算法与固定/随机方法E[min(SINRk)]性能对比Fig.3 Comparison of E[min(SINRk)]values of alternate iterative optimization algorithm and fixed/random method under transmission power constraints

图4 发射功率约束下有无IRS辅助的E[min(SINRk)]性能对比Fig.4 Comparison of E[min(SINRk)]values with and without IRS assistance under transmission power constraints
发射功率约束下交替迭代优化算法与固定/随机方法的E[min(SINRk)]性能对比仿真如图3 所示。固定/随机方法中IRS 无源反射单元的相移系数在范围[0,2π]之间随机设置。仿真结果表明,交替迭代优化算法性能远远优于固定/随机方法,并且,发射功率越大,性能优势越显著。此外,仿真显示无源反射单元个数N值越大,系统性能越好。这表明增加IRS的维度,即反射单元数目,有助于改善反射波束的形成,提高反射精度,从而提高了系统的性能。这种趋势在基站和用户之间的直接路径被严重阻塞的情况下更为显著。
图4 对比了系统中有无IRS 的性能差异,当场景中引入IRS 时,可显著提高通信性能。在噪声功率相同的情况下,即σk2=-139 dB,引入IRS 并进行交替优化后,性能提高了近30 dB。
图5,图6在同一仿真参数下得到,该仿真实验设定M=12,N=36,以及P={0,5,10}dB。车辆数量对E[min(SINRk)]的影响如图5所示,随着网络中车辆数量的增加,通信质量呈现下降趋势。其原因在于,车辆数越多,车辆在研究区域内位置组合的情况也越多,要达到更高的通信性能,需要反射波束更加精确,但研究的系统中只包含一个IRS,并且,同一时刻,IRS的相移系数是固定的,很难同时满足生成多个精细的反射波束的需求。因此,要克服这个问题,可通过增加系统中IRS的数量,或者增加IRS反射单元的数量,以满足更多车辆同时高质量通信的需求。

图5 E[min(SINRk)]性能随车辆数目K的变化情况Fig.5 E[min(SINRk)]performance when varying the total number of vehicles,K

图6 总频带利用率随车辆数目K的变化情况Fig.6 Sum-rate performance when varying the total number of vehicles,K
基站总频带利用率(Sum-rate)性能随车辆数目K的变化情况如图6 所示。仿真结果表明,K<10时,车辆数量越多,频带利用率越高。然而,当K=10 时,频带利用率开始下降,表明对于频带利用率这一性能指标,K=10 为临界值。该临界值存在的原因在于,由式(15)可知,Sum-rate不仅与每辆车的频带利用率,log2(1+SINRk),正相关,即与信干噪比SINRk正相关,还与车辆数K正相关。由图5可知随着车辆数K的增加,信干噪比一直在降低,因此,每辆车的频带利用率,也会随之降低。而在图6中,K<10时,K增加,每辆车的频带利用率降低,而Sum-rate一直在增加,说明此时车辆数K为主要的影响因素,信干噪比降低不足以抵消车辆增长带来正反馈。达到临界值K=10 后,Sum-rate 下降,说明此时信干噪比为主要的影响因素,信干噪比降低的负反馈胜过车辆增长带来正反馈,故显示出Sum-rate 下降的趋势。结合信干噪比呈现下降趋势的原因分析,若增大M,N的数值,意味着系统有着生成更加精细的波束的能力,因此,可以通过增大M,N的方式来提高该临界值。
图7为本文所提出的交替迭代优化算法的迭代曲线,显示了算法的收敛性能。曲线显示大约经过4次迭代,可达到算法的最佳性能,故收敛条件——最大迭代次数这一参数不用设置得很大,就能得到很好的性能表现。但由于两次随机化过程必定会引入误差,导致迭代曲线一直在1 dB 范围内波动,并且随着迭代次数的增加也不能完全稳定。

图7 交替迭代优化算法的迭代曲线Fig.7 Iteration curve of the alternate iterative optimization algorithm
5 结论
本文结合半定松弛方法,将目标优化问题分解为两个子问题,提出了交替迭代优化算法,以实现基于单个IRS 辅助的MU-MISO 车联网通信系统的联合波束赋形。该方法在满足最大传输功率约束的同时,显著提高了车辆用户接收信号的信干噪比。仿真结果表明,与没有IRS 的情况相比,引入IRS 并结合本文采用的算法进行交替优化后,通信质量提高了近30 dB。同时,其性能也远远优于固定基站波束赋形矢量和随机IRS相移矩阵的方案。然而此方法也存在部分局限,例如:两次随机化过程引入的误差导致迭代曲线一直在1 dB 范围内波动,随着迭代次数的增加也不能完全稳定,并且算法计算开销较大。同时,未能具体研究车辆高速移动和动态阻挡物的影响。未来,将考虑以上问题,进一步优化该算法。
