公转和自转协同下绕包机转速自动控制研究
2024-03-06邓文军陆文钦
万 曦,邓文军,路 锐,陆文钦
(国网江苏省电力有限公司 常州供电分公司,常州 213000)
绕包机在公转过程中整体移动,在自转过程中进行卷取,而公转和自转之间存在相互影响。为了实现稳定的转速控制,保障产品质量和生产效率,并提高绕包机系统的可靠性和稳定性,需要综合考虑公转和自转之间的相互作用,以确保绕包机在不同运行状态下能够实时、灵活地调节转速,提高生产效率和质量稳定性,并进一步推动绕包机技术的发展,因此,研究公转和自转协同下绕包机转速自动控制方法具有一定的现实意义。
在上述背景下,文献[1]提出一种离散时间综合控制法,通过跟踪转速的动态情况,设计针对转速的闭环控制算法,为保证转速控制的稳定性,通过自适应算法实现转速有效控制;文献[2]提出基于改进遗传算法的转速控制方法,通过改进遗传算法优化PID 控制器参数,同时搭建优化转速控制的可视化模型,实现转速控制;文献[3]提出通过PI 与无模型自适应控制结合实现转速控制,该方法采用遗传算法优化PI 控制器参数,并通过紧格式无模型自适应控制器与PI 控制器的积分环节的相似替换,改进控制器的整定效果,以此实现转速控制。上述方法虽然能够实现转速控制,但是由于没有充分考虑公转和自转的协同性,在调整绕线头和步进电机转速时反应较慢,操作员可能需要进行手动干预或出现生产中断。因此,为了提高转速控制的响应速度,对绕包机转速自动控制方法进行改进是十分必要的,本文提出一种新的公转和自转协同下绕包机转速自动控制方法。
1 一种绕包机转速自动控制方法设计
1.1 绕包机公转和自转协同控制
为了减少绕包机协同公转和自转过程中可能产生的非线性影响,加强转速自动控制效果,使绕包机的转速控制能更加精确,建立神经网络控制模型,通过神经元本身较强的学习能力,快速映射出绕包机转速的动态变化[4-6]。神经网络控制模型建立在一个单变量的基础上,构建出一个三层的线性神经元网络结构,输入层的神经元主要描述公转速度和自转速度,将其作为神经网络的输入条件,隐含层主要划分比例、积分等条件因素,输出层通过一个单独的神经元输出控制规律。
为了能使神经网络的输入、输出层更接近绕包机公转和自转的动态特性[7-8],通过状态转换函数决定各个神经元的状态变换情况,即神经元的状态取决于转换函数[9]。
针对模型中的输入层,假设在任意一个采样时刻,网络中的两个输入状态为
网络隐含层中的3 个神经元,分别对应着计算比例、积分元和微分元[10],计算过程中在这一层的输入总值为
式中:ωi,j表示前后两层之间的连接权重,i=1,2,…。
在权重参数影响下,各神经元的输出状态为
最终通过输出层输出相对完整的控制规律,具体为
1.2 绕包机转速自动控制实现
由于神经网络模型需要大量的数据进行训练,以获得准确的控制能力。对于绕包机这种复杂的系统,获取足够丰富和代表性的数据具有一定的挑战性。因此,为了提升绕包机公转和自转的协同控制效果,针对构建的神经网络模型,利用反向传播算法对其进行改进,调节网络权值[11],以此提升公转和自转协同控制效果,同时,在参数变化的条件下计算绕包机旋转样本数据的梯度,可以有效地减少迭代次数,同时保证绕包机公转和自转的稳定性。
首先调整神经网络中各个神经元的权值参数,保证控制目标函数的最小化:
式中:m 表示神经元个数。
然后利用近似均方误差计算出网络隐含层对应的输出权值:
式中:α 表示神经元的学习步长;n 表示神经元的训练步数;∂表示微积分运算。通过推导可以获得转速的变化梯度[12]:
式中:δ′表示梯度变换函数。
在神经网络模型训练中,对于神经网络中输入层与隐含层之间的权值变化,可以具体表示为
式中:E 表示网络输入样本。进一步通过对绕包机旋转过程中的敏感关系进行递推[13],反向求得神经网络中不同层级的变化状态:
同时,引入动量权值[14],以提高模型收敛速度,提升绕包机公转和自转协同控制效果:
式中:γ 表示引入的动量权值,取值区间为0~1,其会影响权值的更新变化情况,在增量状态下,结果将调出局限最小值,在实施控制策略时将大大提高收敛速度。
在绕包机公转和自转协同控制的基础上,利用双馈定向矢量方法展开绕包机转速自动控制研究。绕包机运行时,可充当双馈电机,在实际的旋转坐标轴下,构建对应的电压和磁链方程式[15]:
式中:us,ur分别表示绕包机定子和转子对应的电压矢量;is,ir分别表示定、转子电流矢量;ψs,ψr分别表示绕包机定子和转子对应的磁链矢量;Ls,Lm表示定子之间存在的互感;Lr表示定子间存在的漏感。
为了实现对绕包机转速的自动控制,需要满足如下条件:
式中:σ 表示电机的漏磁系数。
在满足绕包机定子和转子对应电压矢量和磁链矢量条件的基础上,实现绕包机转速自动控制。
2 实验验证分析
2.1 实验参数与条件设定
选取型号为XYZ-1000 的绕包机作为实验对象,其具体参数如表1 所示。
表1 XYZ-1000 绕包机参数Tab.1 Parameters of XYZ-1000 wrapping machine
为了验证所提方法的控制效果,在对绕包机转速进行控制的过程中,通过设置不同的实验条件,确定所研究控制方法是否真实有效,具体的实验条件:
条件1转速恒定状态,速度稳态情况状态下突发性的调整参数。
条件2跃变式输入,使参数突变发生在每个不同的速度区间。
条件3当电机输入处于正弦和余弦状态下,使参数突变发生在每个不同的速度区间。
2.2 实验结果分析
在上述条件下进行控制前和控制后的转速控制效果对比,实验结果如图1~图3 所示。

图1 恒定输入条件Fig.1 Constant input conditions
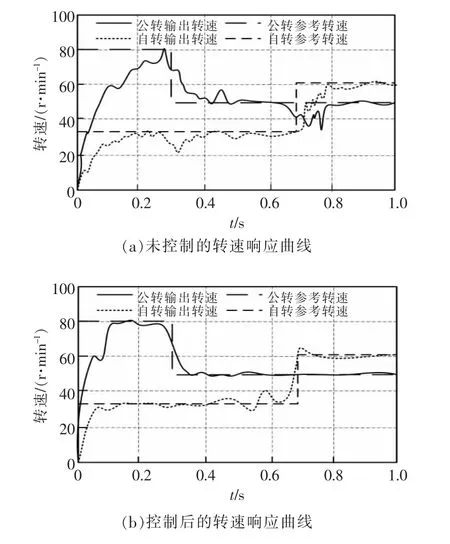
图2 跃变输入条件Fig.2 Jump input conditions

图3 正弦和余弦输入条件Fig.3 Sine and cosine input conditions
图1~图3 中,图(a)部分为绕包机电机对应参数发生突变后,在不同的输入条件下对输入信号的实际跟踪效果,图(b)部分为经过所提方法训练后的转速控制效果。从图中可以看出,所提方法能够实现对不同环境下绕包机转速的有效控制,其中,对条件1 和条件3 的控制效果更好,说明所提转速控制方法可以获取很好的控制效果。
绕包机在作业过程中,其中的旋转电机不可避免地会产生一定的噪声,控制过程中会受到其他干扰因素的影响,因此在实验过程中,为了验证转速控制方法在有干扰状态下的控制效果,在输出信号中添加一部分白噪声,主要目的是验证方法的抗干扰能力,实验结果如图4 所示。
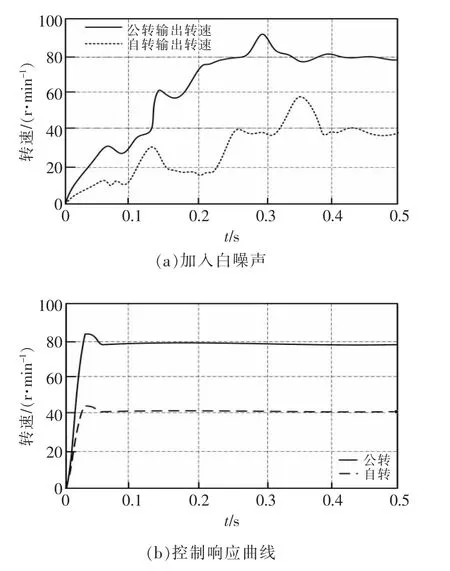
图4 控制响应测试结果Fig.4 Control response test results
从图4 中可以看出,在加入白噪声的情况下,由于干扰因素的存在,控制效果会受到一定程度的影响,但是所提方法仍然能够在短时间内实现转速的有效控制,说明该方法受到干扰因素的影响程度较小,进一步验证了其控制效果。
3 结语
在研究绕包机转速控制方法的过程中,通过神经网络模型实现绕包机公转和自转协同控制,并通过调整神经网络中各个神经元的权值参数和引入动量权值改进神经网络模型,以提升模型收敛速度,保证绕包机公转和自转的稳定性。在此基础上,利用双馈定向矢量方法实现绕包机转速自动控制。实验结果表明,所提控制方法的控制效果较好,且不易受干扰因素影响,鲁棒性较好。
