隧道综合巡检机器人设计及研究
2024-03-06刘丹丹刘宜胜陈志丹
孙 炳,刘丹丹,刘宜胜,陈志丹
(1.浙江理工大学 机械工程学院,杭州 310018;2.浙江众合科技股份有限公司 中央研究院,杭州 310051)
随着我国综合国力的不断提升,轨道交通建设快速发展,2022 年在各地投入运营的线路中,地铁运营线路占比达77.84%[1]。为保证地铁的顺利运营,维修人员需要定期对地铁线路进行巡检排除安全隐患[2]。目前对于地铁运营安全状态的检测主要以人工巡检的方式为主,但对巡检人员的专业素质要求较高,检测结果往往受主观的影响较大,而且由于地铁运营的特殊性,一些检测需在运营空窗期内进行,甚至还可能危害到巡检工人的人身安全,难以满足日益增长的运营需求[3]。近年来,随着人工智能、大数据、5G、云计算等新一代信息技术的发展,为机器人的发展提供了技术支持[4]。机器人代替人工巡检地铁线路,不仅在检测效率上有较大的提升,而且能够减少巡检时遇到的安全事故风险。
当今国内外的研究学者对隧道巡检装置的识别方法、结构设计、控制系统等进行了研究。文献[5]设计了一套基于机器视觉的车载式铁路轨道巡检系统,该系统利用相机采集图片,实现对道床轨道缺陷的识别。文献[6]设计了一台基于多传感器的重载铁路巡检无人机,介绍了无人机的系统架构设计,实现了对无人机任务工作的管理。文献[7]研究了一种车载式道床部件检测装置,采用3D 相机与2D 相机,实现对钢轨、扣件、道床等轨道部件各类病害的识别。文献[8]研发了一种悬挂式隧道运营安全智能巡检机器人,可以实现对结构病害、路面异常以及交通环境的自动巡检,设计了机器人的整体架构。地铁隧道中病害种类多,针对隧道和道床的综合检测研究较少。
针对以上问题,本文设计了一台隧道综合巡检机器人,并生产了样机,在实际地铁隧道工况中进行试验测试,验证了机器人的可靠性,实现了机器人对地铁隧道的相关数据采集。
1 总体设计
隧道综合巡检机器人的总体框架设计由机械结构、控制系统与数据中心组成。机械结构部分分为隧道病害采集模块、道床病害采集模块、钢轨点云采集模块、地基沉降检测模块以及底盘行走模块。控制系统由通讯模块、机器人控制模块、传感器报警模块和电池模块组成。数据中心保存隧道综合巡检机器人运行时采集的隧道数据,并通过采集数据处理模块进行数据处理。隧道综合巡检机器人总体设计如图1 所示。
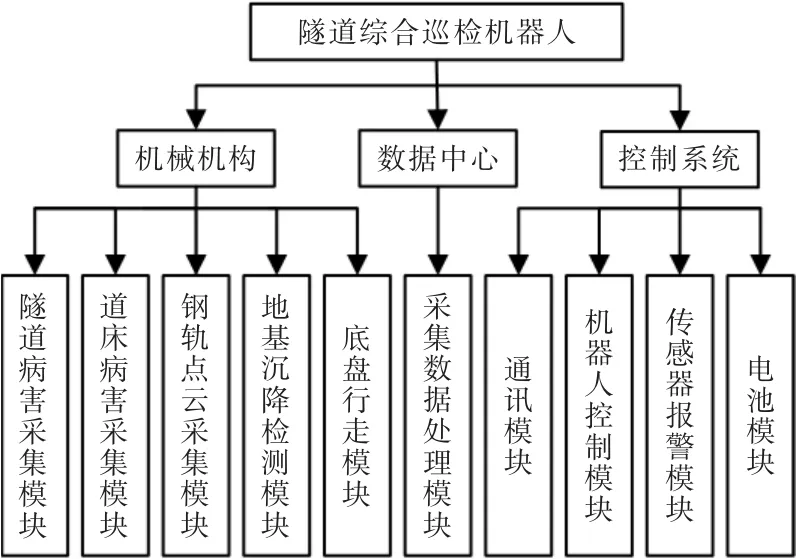
图1 隧道巡检机器人总体设计Fig.1 Overall design of tunnel inspection robot
2 机械结构设计
隧道综合巡检机器人的结构设计采用模块化设计思路,每个模块都有其对应的独有功能,并且各个模块之间均保持一定的独立性。同时,各模块之间的机械接口和电气接口既能保证其进行可靠连接,还能实现其进行快速化的拆换,使其保持简单性和操作的便捷性各不影响[9],实现隧道巡检机器人的快速上下线。隧道综合巡检机器人Solid-Works 模型如图2 所示。
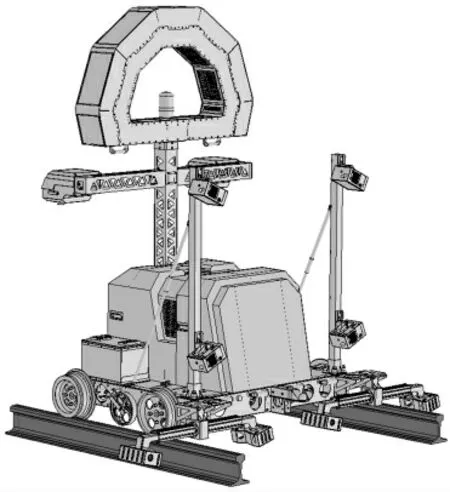
图2 隧道巡检机器人模型Fig.2 Tunnel inspection robot model
2.1 隧道与道床病害采集模块结构设计
经过查找隧道施工资料了解,单洞单轨隧道的半径在2600 mm,道床检测范围在2800 mm,这就要求机器人搭载模块的相机拍摄角度需要相互重叠一部分,才能实现同一段区域图像的拼接,反馈这一区域的病害图像信息。
隧道与道床病害采集模块采集模块由线阵相机、光源、报警灯、立柱组成,如图3 所示。隧道病害采集模块与道床病害采集模块连接部分立柱采用碳纤维复合材料加工制作,碳纤维复合材料随着工业的发展,被越来越多应用为各类零部件的所选材料,市场前景良好[10]。采用碳纤维复合材料降低了模块重量,也有利于人工的搬运,减轻工作负担。隧道病害采集模块相机数量为7 个,每个相机的拍摄宽度为2500 mm;道床病害采集模块相机数量为2 个,每个拍摄宽度为1500 mm,相机拍摄角度整体布局如图4 所示。
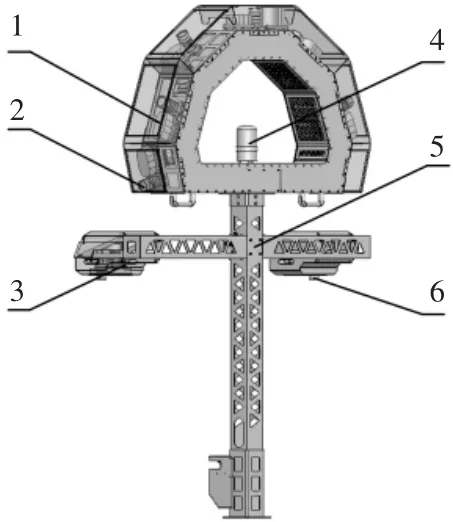
图3 隧道与道床病害采集模块模型Fig.3 Tunnel and track bed disease collection module model

图4 采集布局Fig.4 Collection layout
2.2 底盘行走模块结构设计与校核
2.2.1 底盘行走模块结构设计
底盘行走模块结构如图5 所示。底盘行走模块主要由底盘、从动轮、链轮、驱动轮、减速器、驱动电机、传动轴和编码器轮组成。驱动电机经过减速器、链轮带动驱动轮转动,前进方向两轮之间用传动轴传输动力,处于后方的两轮采用分体设计,相互独立,作为从动轮。编码器轮随底盘的前进或后退而转动,周期性输出脉冲信号。为避免打滑而产生脉冲缺失,使得采集数据丢失,编码器轮通过使用弹簧机构,使编码器轮的表面始终贴合在钢轨表面。

图5 底盘行走模块模型Fig.5 Chassis walking module model
2.2.2 电机校核
确认各模块的相关信息后,可以得出隧道综合巡检机器人的重量、运行信息与尺寸数据等参数,参数表如表1 所示。
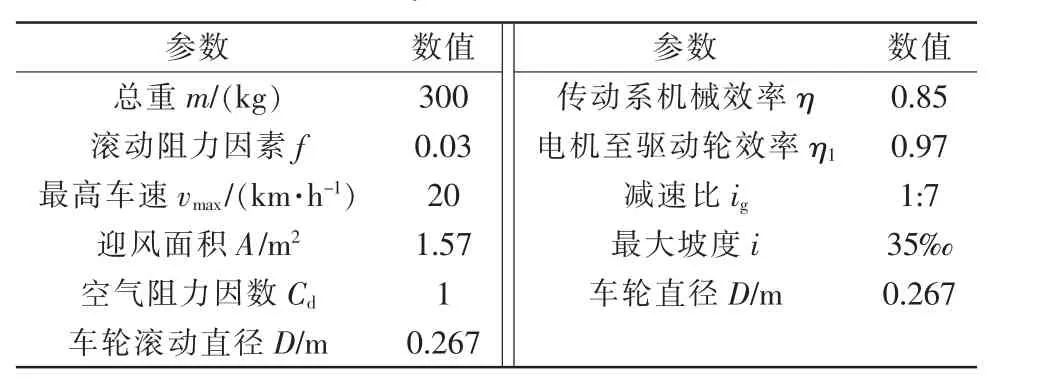
表1 隧道综合巡检机器人参数Tab.1 Parameters of tunnel comprehensive inspection robot
根据隧道综合巡检机器人的相关参数对行走电机进行选型及参数计算。无刷电机相对于有刷电机,具有无电刷、低干扰、噪声低、运行顺畅、寿命长和维护成本低的优点[11],因此本隧道综合巡检机器人所选用永磁直流无刷电机。
驱动力的确定。机器人在行驶过程中需要克服阻力,阻力的形式具体有:滚动阻力Ff、空气阻力Fw、坡度阻力Fr,加速度阻力Fj,这些阻力均由驱动力Ft来克服。
在对机器人加速性能没有要求的情况下,加速度阻力暂不考虑[12]。
滚动阻力Ff:
空气阻力Fw:
坡度阻力Fr:
将表1 数据带入式(1)~式(4)计算可得滚动阻力Ff为88.2 N、空气阻力Fw为29.7 N、坡度阻力Fr为102.6 N,Ft驱动力为220.5 N。
电机功率的确定:
将表1 数据与驱动力Ft带入式(5)计算可得电机功率P 为1.441 kW。
驱动电机转矩的确定:
将表1 数据带入式(6)计算可得电机转矩T 为4.32 N·m。
驱动电机转速的确定(行走电机的转速根据机器人的最高车速确定):
计算得所需电机的最高转速2793 r/min。
确认所需电机的各项参数后,选用步科的SMC 130D-0150-30ABK-ADKR 电机,电机参数如表2 所示。

表2 SMC130D-0150-30ABK-ADKR 电机参数Tab.2 SMC130D-0150-30ABK-ADKR motor parameters
3 控制系统设计
3.1 硬件系统设计
FPGA 具有高度并行性、实时性好和丰富的资源等优点,因此被更多地应用于电机控制等高性能控制领域[13]。机器人选用FPGA 控制板负责整个系统的采集、运算和通讯。系统包括了无线模块、相机模块、光源模块、电源模块、点云模块等,通过FPGA控制各个模块的运行与停止。激光雷达用于判断机器人前方是否存在障碍物,声光报警器用于提醒机器人功能异常,及时排除故障,编码器除了周期性提供脉冲触发信号控制外,还提供机器人的定位里程信息,反馈机器人在隧道中的位置。FPGA 通过路由器与工控机上位机连接,控制人员通过网络连接即可查看到机器人的状态信息,工控机将采集的数据保存至数据存储模块。人员通过网络连接至工控机,将任务命令下发至机器人系统,控制机器人采集任务执行,必要时也可以使用遥控器通过无线模块控制电调模块,控制隧道综合巡检机器人的运行。硬件系统总体架构如图6 所示。

图6 硬件系统总体架构Fig.6 Overall hardware system architecture
3.2 控制系统流程设计
启动旋钮开关后,机器人首先进行系统初始化,机器人的电机、相机模块、点云模块、激光雷达和声光报警器等开始启动,通过接收遥控器的控制运动指令后,机器人进行前进或后退等动作。机器人搭载的激光雷达探测到前方有人或者物体等障碍物时,巡检机器人将立即抱闸并发出声光报警,停止运行。通过遥控器解除机器人抱闸,并移除障碍物。PAD 端通过上位机控制界面设置机器人巡检任务,确认机器人的运行速度、巡检里程等信息。控制系统程序流程如图7 所示。
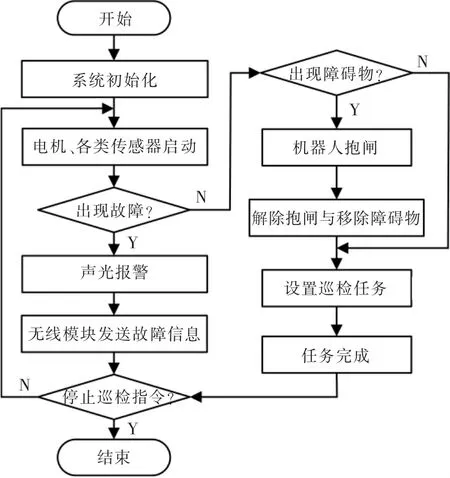
图7 控制系统流程Fig.7 Control system flow chart
4 基于ANSYS Workbench 的底盘变形分析
确认了隧道综合巡检机器人的整体框架后,利用ANSYS Workbench 对底盘进行静力学仿真分析[14]。机器人的自重也是设计考量的重要因素之一,所以设计时在保证结构承载能力的情况下,选用合适的材料。底盘材料选择有铝合金与结构钢两种,其相关的材料属性如表3 与表4 所示。
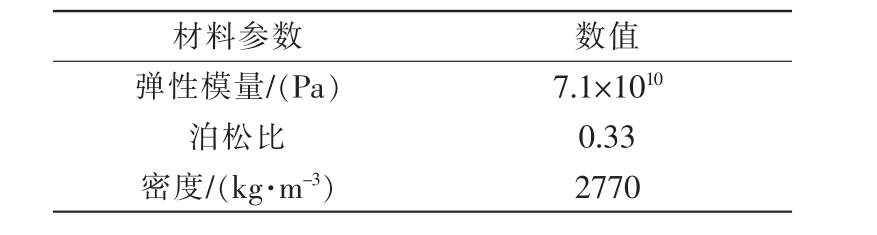
表3 铝合金材料属性Tab.3 Aluminum alloy material properties

表4 结构钢材料属性Tab.4 Structural steel material properties
铝合金等效应力图和变形云图如图8 所示。由图8 可知,等效应力图所示最大应力为37.52 MPa,等效应力图如图8(a)所示;变形云图所示最大位移量0.34 mm,变形云图如图8(b)所示。

图8 铝合金等效应力与变形云图Fig.8 Aluminum alloy equivalent stress and total deformation diagram
结构钢等效应力图和变形云图如图9 所示,由图9 可知,等效应力图所示最大应力为53.11 MPa,等效应力图如图9(a)所示;变形云图所示最大位移量0.16 mm,变形云图如图9(b)所示。

图9 结构钢等效应力与变形云图Fig.9 Structural steel equivalent stress and total deformation diagram
两种材料都满足隧道综合巡检机器人强度设计要求,但铝合金相较于结构钢,其密度更低,同样尺寸的结构件,重量可减轻50%以上,选用铝合金作为机器人底盘的加工材料。
5 样机测试
设计完成后,加工隧道综合巡检机器人各部分模块结构件,在真实地铁环境中对机器人进行控制采集试验,样机测试如图10 所示。

图10 隧道环境测试样机Fig.10 Tunnel environment testing prototype
对采集的隧道图像进行拼接,结果如图11 所示。

图11 隧道图像拼接结果Fig.11 Tunnel image stitching results
6 结语
本文设计了一台隧道病害检测采集的隧道综合巡检机器人,开发了机器人系统的功能架构,确认了病害采集的各个模块功能,并采用SolidWorks 软件建立3D 结构模型。介绍了机器人的机械部分及控制系统的设计,重点研究了相机的采集角度与机器人底盘设计,根据机器人运行状况选择合适电机,并进行了电机校核,进一步分析了机器人底盘的静力学变形问题,确认选用材料,使其既可满足使用要求,且自重较轻。通过搭建样机进行实验,验证了机器人在真实隧道环境中能够安全可靠运行;机器人的功能与性能达到设计要求;机器人采集图像结果为后续隧道病害识别提供了基础。
