基于可编程控制器的永磁同步电机控制方法
2024-03-06徐晓艳
徐晓艳
(辽宁科技大学 应用技术学院,鞍山 114051)
永磁同步电机(PMSM)诞生于20 世纪50 年代[1],由于其易于控制的特点,该电机在工业和生活中应用范围极大[2],由于永磁同步电机具有极佳的机械性能,且将传统电机的励磁线圈替换为永磁体使电机的结构更加简单[3],可靠性更高。目前针对永磁同步电机的研究基本是使电机能够输出更大的扭矩,或者使永磁同步电机的转速控制更精准快速[4]。
目前针对永磁同步电机的控制方法有很多:文献[5]利用自适应率实现动态化滑模控制边界层,从而提高控制系统的鲁棒性,并且利用扰动观测器通过观测动子质量从而计算出需要对永磁同步电机的电流以及负载扰动的补偿,从而控制永磁同步电机;文献[6]通过灵活调整基础矢量的作用时间,增加了控制自由度,使操纵变频开关的响应频率增加,从而更好地控制永磁同步电机;文献[7]根据永磁同步电机的开关切换历史数据得出转移概率矩阵,根据矩阵计算出状态转移约束误差,通过约束误差得出代价函数,根据代价函数计算出最佳的控制变量,完成对永磁同步电机的控制。上述方法虽然能够完成对永磁同步电机的控制,但也存在着一定的缺点,如对电机的控制存在一定的滞后性,无法快速响应瞬间进行控制,无法对已经设定的控制规则进行更改,控制效果存在一定的不足等。
可编程控制器(PLC)具有可靠性强、抗干扰性强、适应性强、安装调试方便、维修方便以及体积小巧等特点[8]。本文基于上述优点提出基于可编程控制器的永磁同步电机控制方法,对于电机的控制能够做到实时响应、快速调整,控制效果极佳。
1 永磁同步电机控制
1.1 永磁同步电机模型及矢量控制原理
一般情况下对于永磁同步电机的建模,使用d-q坐标系[9],因为永磁同步电机系统十分复杂,其具有强耦合[10]、多变量的特性,d-q 坐标系可以分析永磁同步电机的静态性质以及动态性质,永磁同步电机的数学模型为
式中:ud、id、Ld为定子的d 轴电压、电流、电感;uq、iq、Lq为定子的q 轴电压、电流、电感;J 为转动惯量;Rs为定子电阻;TL为负载扭矩;ωm为永磁同步电机的机械转速;ψf为转子永磁体产生的磁链;B 为粘滞系数;P 为电机极对数。
1.2 基于PLC 的永磁同步电机控制方法
采用PLC 控制结合FPGA 的模块化思想构建永磁同步电机的控制架构[11],如图1 所示。其中包含ADC 采样模块、编码器解码模块、PLC 控制模块[12]、FOC(矢量控制)模块[13]、SVPWM(空间矢量脉宽调制)模块等。在永磁同步电机运行时利用霍尔传感器采集转子位置,同时将转子扇区中心线的位置认为是转子的位置;利用SVPWM 模块指示扇区分界线的PWM信号;使用ADC 模块采集电机运行的电流信号,将电流信号进行Clark 变换、Park 变换计算出d-q 轴电流,将期望速度与实际速度输入PLC 控制器,计算出期望电流,再将变换后的d-q 轴电流与期望电流再次输入PLC 控制器得到d-q 轴期望电压,对d-q轴电压进行逆Park 变换与SVPWM 调制,便可以直接改变永磁同步电机的功率,完成永磁同步电机的控制。
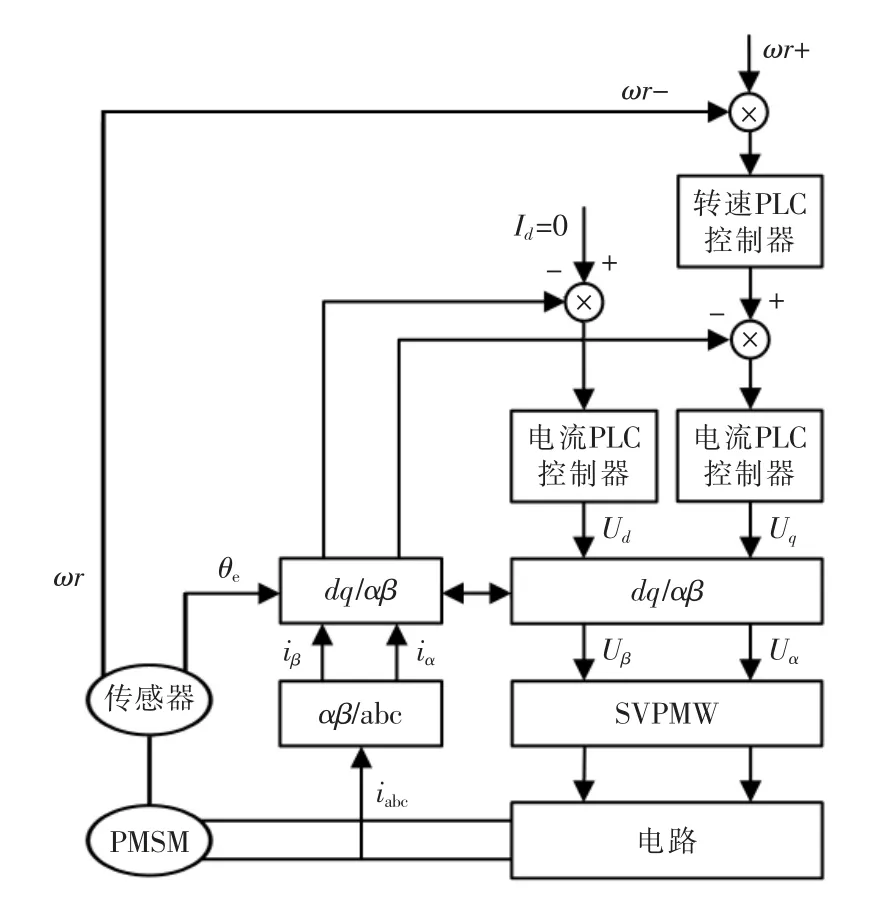
图1 永磁同步电机控制架构Fig.1 Control architecture of the permanent magnet synchronous motor
1.2.1 编码器解码模块
在编码器解码模块中,存在AB 两相的脉冲输出信号,Z 相的圈数信号,如此三相信号便是编码器的输出信号,其中AB 两相的脉冲信号相差90°,以B 相信号为基准,根据A 相信号在B 相信号的前后从而判断永磁同步电机的旋转方向,编码器旋转1圈便发射1 次脉冲信号,该信号便是Z 相信号又称为零位脉冲(标识脉冲),零位或标识位值便是通过零位脉冲进行决定,脉冲高度的50%便是零位脉冲强度。通过编码器便可以进行速度检测,以100 μs为1 个周期,根据检测出的1 个完成脉冲即可算出速度,当检测10 个周期没有完整脉冲便可确定电机速度为0。
1.2.2 PLC 控制模块
对于电机的控制使用PLC 控制模块,其中运用了PID 控制算法进行控制[14],PID 控制算法原理如图2 所示。
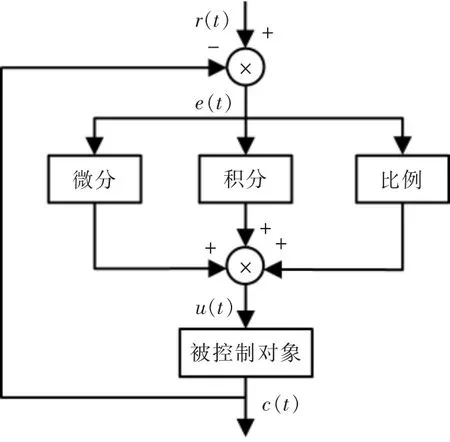
图2 PID 控制原理Fig.2 PID control principle
PID 控制可以理解为将预定值r(t)和实际值c(t)做差:
一般PID 的控制规则为
式中:TD为微分时间常数;TI为积分时间常数;KP为比例系数;u0为控制常量。
对于PID 控制算法,直接增益和积分信号放大两部分共同组成了输入和输出的插值,但是一般情况将D 项视为0,而希望直接得到增量,因此增量式PID 算法便是直接提供增量信号,算法公式为
若要根据式(4)计算出u(k),还需要计算本次偏差信号和上次偏差信号e(k)、e(k-1),且还要保留e(j)的空间,因此对式(4)进行改进。
根据递推原理可以计算出:
式中:KI=KPT/TI表示积分系数;KD=KPTD/T 表示微分系数。
根据积分系数与微分系数便可以减少转化实际电流值的复杂运算。
1.2.3 FOC 模块
FOC 模块需要采用Clark 变换和Park 变换计算ACD 采集到的电流[15],并将计算结果输入PLC 控制器和逆Park 变换,通过逆Park 计算出电压值。在FOC 中坐标变换是十分重要的,而Clark 变换、Park变换以及逆Park 变换在坐标变换中起到了十分重要的作用。
(1)Clark 变换。使用Clark 能够计算出在αβ坐标中的电流。
(2)Park 变换。将αβ 坐标中的电流值变换到d-q坐标中便是Park 变换的本质,逆Park 变换则是该过程的逆向。
(3)逆Park 变换。通过逆Park 变换可以得到α和β 两相电压。
1.2.4 SVPWM 模块
期望电压矢量能通过组合基础矢量进行等效,在开关周期中,利用SVPWM 的平均等效原理可以实现。空间中旋转磁场是由电压矢量和转子转动形成的。三项全桥逆变器驱动电路如图3 所示。

图3 三项全桥逆变器驱动电路Fig.3 Three full-bridge inverter drive circuit
通过图3 可以看出,在电路中包含了6 个功率管(Q1~Q6),为防止电路短路导致功率管损毁,因此以横轴为分界将功率管分为左右2 层,左右相对应的功率管不能同时打开,且电流不能突变,为了防止发生短路事故,在功率管开关切换时增添死区进行保护。但是上下对应的功率管必须保证有1 个是开启状态,因此运用二进制表示开关的启停状态,如010 表示功率管Q1、Q4和Q5为通路,基于此可以通过简单计算便可得知该功率管共存在8 种状态,通过各基础矢量便可以组合成期望电压,且8 个基础矢量中存在2 个0 矢量,其他非零矢量幅值可表示为2/3 Vdc。在永磁同步电机中的1~6 扇区是由2个相邻角度为60°的矢量与六边形的边共同形成的。若设矢量中的一个不等于0 的矢量在扇区1 为Vref,则该矢量在当前扇区的时间为T,并且V 的基础矢量可由T4与T6组合形成,分别表示矢量V4和V6的作用时间,在一个周期内成立公式为
根据式(2)可以看出,相邻基础矢量组合的效果与矢量作用效果相同,则Vref和基础矢量对应的1 扇区公式为
结合式(11)与式(12)便可以计算出不同矢量的作用时间:
根据不同基础矢量进行组合得到矢量,通过矢量完成对永磁同步电机的控制。
2 仿真实验
2.1 实验对象
为验证本文方法的控制效果,使用某永磁同步电机进行试验,永磁同步电机的具体参数如表1 所示。

表1 永磁同步电机参数Tab.1 Parameters of the permanent magnet synchronous motor
2.2 结果与分析
为验证编码器模块的测速效果,将控制器启动,令永磁同步电机速度为0,经过5 s 后令永磁同步电机速度15 s 内线性增加至300 r/min,持续5 s 后读取编码器测定的永磁同步电机速度,结果如图4 所示。通过图4 可以看出,使用编码器模块进行速度测量能够准确测得永磁同步电机的实时速度,无论速度为0 或者增加或者保持不变,均能够准确测量,为后续永磁同步电机的控制提供了强大的保证。

图4 编码器模块测速结果Fig.4 Speed measurement results of the encoder module
采用本文方法对永磁同步电机进行控制,并与DSP 控制方法进行对比,设定永磁同步电机的期望转速为900 r/min,永磁同步电机由静止启动在达到900 r/min 后0.2 s 施加20 N·m 的扭矩,待转速恢复平稳后0.2 s 使扭矩降至7 N·m,永磁同步电机的速度和扭矩变化如图5 所示。通过图5 可以看出,采用DSP 方法进行永磁同步电机控制,无论是永磁同步电机的速度还是永磁同步电机的扭矩,均有十分剧烈的波动,且在速度控制时具有一定的滞后性,而使用本文方法进行控制时,永磁同步电机的速度和扭矩的波动较小,且波动曲线平滑,可以看出本文方法能够更加准确地控制永磁同步电机。

图5 永磁同步电机控制结果Fig.5 Control results of the permanent magnet synchronous motor
在使用本文控制方法后,与未应用本文控制方法的永磁同步电机进行对比,使速度保持在1200 r/min,两电机的速度波动如图6 所示。通过图6 可以看出,在使用本文控制方法前,保持永磁同步电机特定转速十分困难,转速的波动十分剧烈且频繁,当应用了本文的控制方法后,虽然也存在偶尔的速度波动,波动幅度和次数较应用本文控制方法前已经有了明显的改善。
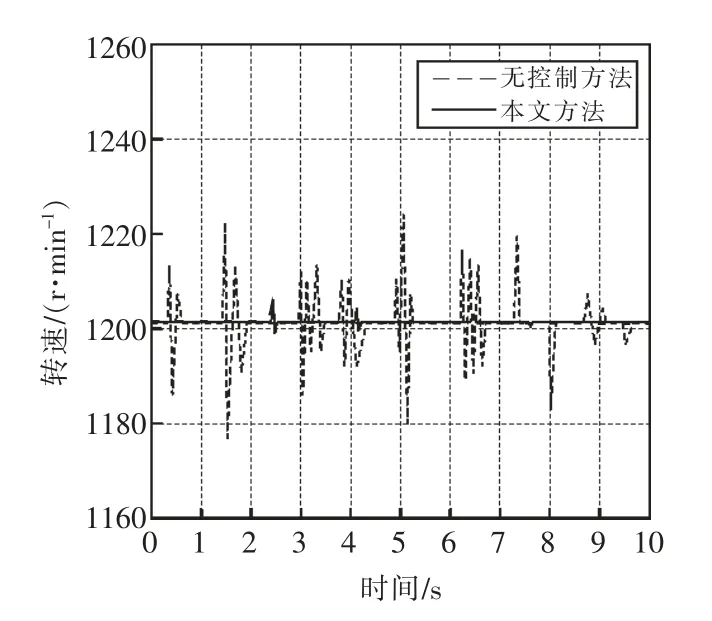
图6 应用本文方法的控制效果Fig.6 Control effect of the proposed method
3 结语
通过实验可以看出,本文方法中编码器能够准确测量出永磁同步电机的实时转速。在改变永磁同步电机的扭矩时,使用本文方法进行控制后永磁同步电机的速度波动小、响应及时,且扭矩改变后永磁同步电机的扭矩也能够快速调整至适合的扭矩,同时产生的波动也很小。在保持速度时使用本文方法与未使用本文方法的永磁同步电机的速度波动也具有明显的差异,可以证明本文方法具有极佳的控制性能。
