基于免疫粒子群的水轮机调节系统动态滑模控制系统
2024-03-06张继光丁正红李腾飞
张继光,丁正红,李腾飞
(陕西省水电开发集团股份有限公司,西安 710065)
开发水力发电对于能源安全、水资源利用、环境保护等方面有着重要的意义[1]。水电站发电可通过改变水轮机速度达到对输出功率的调整。传统的控制器已经满足不了水轮机的非线性和负载的无规律变化,因此为了提高水轮机的控制效果,近年来,许多学者做了不少研究。如文献[2]通过对PI 控制器采用模糊处理,提出了一种参数可以随着水轮机转速实时变化的滑模控制系统,虽然可以控制水轮机调节系统的抖振问题,但是模糊控制的设计需要大量的经验,而且控制精度低;文献[3]提出一种自适应趋近率的滑模变结构控制系统,该系统适用于非线性系统,可以屏蔽干扰,修正目标轨道的跟踪控制,从而达到控制需求。但是该系统存在参数配置不好,收敛速度慢的问题。
免疫粒子群算法具有鲁棒性,适用复杂多变的求解问题,具有收敛速度快、全局寻优能力强的特点。为此本文结合免疫粒子群算法以及动态滑膜控制,提出一种基于免疫粒子群的水轮机调节系统动态滑模控制系统,保障水轮机调节系统的灵活调度和安全稳定运行,最大程度保障水力发电效果,促进清洁能源可持续发展。
1 水轮机调节系统动态滑模控制系统
1.1 水轮机调节系统动态滑模控制系统结构
水轮机调节系统动态滑模控制系统的框架图如图1 所示。

图1 水轮机调节系统动态滑膜控制系统框架图Fig.1 Frame diagram of dynamic sliding film control system of hydraulic turbine governing system
该隧洞的动力学方程具有非线性,表达式为
式中:超长隧洞的水流惯性时间常数用TwH0描述;调压室水位的变化幅度用z 来描述;水轮机的水头损失用hH0描述;水头用H0来表示;超长引水隧洞的流量用qH来描述。
调压室的动力学方程表达式为
式中:压力管道流量用qp表示;调压室时间常数用TF表示。
水轮机力矩、流量的表达式为
式中:水轮机力矩的传递系数分别用eh、ex和ey表示;水轮机流量的传递系数分别用eqh、eqx和eqy表示;力矩偏差的相对值为mt;发电机转速偏差的相对值为x;导叶开度的偏差相对值为y。
电液伺服机构作为水轮机的主要驱动装置,可以放大控制信号并驱动导叶机构的运动。电液伺服机构的动力学方程表达式为
式中:电液伺服机构的时间常数用Ty描述;控制器输出用u 来描述。
综上所述,建立水轮机调节系统方程组表示为
水轮机调节系统的方程组转换为标准形式来方便控制器的建立。n 阶非线性动力系统的表达式为
式中:水轮机调节系统的状态向量为X;n 维向量场为A(X)和B;有限控制输出为u;输出向量为Y。
通过式(6)能够找到理想轨迹的控制律xd,达到动态滑膜控制下的水轮机调节系统按照理想轨迹进行输出,目的是为了让跟踪误差xd-x 无限趋近于0。
1.2 电液伺服系统
电液伺服系统通过液压传动原理创建的自动控制系统[4-5]。电液伺服系统具备输出功率大、控制精度高等优点,在工业生产的各个领域中广泛应用,可通过控制油缸位置,保障对水轮机状态稳定和精确调节,并及时跟踪和响应系统状态的变化。其中位移传感器用于采集实际位置信号,转换成电压电流信号后,反馈至动态滑膜控制器,形成闭环结构。电液伺服系统结构如图2 所示。

图2 电液伺服系统框架图Fig.2 Frame diagram of electro-hydraulic servo system
1.3 动态滑模控制器
在1.1 小节构建水轮机调节系统状态方程的基础上,秉持水轮机调节系统的动态和稳态运行目标,布局与调节系统控制变量维度一致的输出方程,即:
式中:布局的输出变量用w 来描述;输出的加权矩阵表达式为C=[c1c2c3c4];输出的积分项系数用k 描述;调速器永态转差率用bp描述。
对控制系统动态性能的要求用Cx 表示,设Cj(j=1,2,3,4)分别对应不同工况运行下的取值,系统运行过程中,水压波动幅度小,与水压相关的系数c3、c4通常取0;转速加权系数用c1来描述,开度加权系数用c2来描述;进行构建的输出值全面考虑了水轮机调节过程中动态和静态的要求。系统的动态输出方程为
式中:动态滑模控制系统的不确定参数函数为f(x,θ)=CF(x,θ)+k(x1+bpx2);输入系数为b=-CB∈R,b≠0的前提条件是当c2≠0。
滑模控制是采用控制输入的增加来解决系统不确定动态特征的方法[6]。为此,需要对不确定动态特性具有已知上界的要求。假设存在已知的且满足条件的正定上界函数ρ(·),即:
通过采用具有滑模结构的鲁棒控制方案,可以有效处理系统中的未知动态特性,并获得期望的控制性能。
根据水轮机调节系统在不同运行工况下的性能要求,可以设计一个参考模型。对于式(9)所描述的不确定参数系统,其控制目标是使系统的输出w(t)跟踪参考模型的输出wd∈R。方便后续设计的跟踪误差定义为
基于根据误差结果,建立动态方程,整理得到:
基于上述系统的动态方程,得到滑模控制器的输出控制项表达式为
可通过控制项u 保障系统的输出w(t)跟踪参考模型的输出wd∈R。式中,正反馈增益用ke∈R+表示,定义符号函数sgn(e)为
1.4 基于免疫粒子群算法的动态滑模控制器参数优化
为进一步提升滑模控制器对水轮机调节系统控制效果,采用免疫粒子群优化算法对系统滑模控制器的输出控制项u 进行优化[7]。通过优化滑膜控制器的运行参数,提高系统整体性能。结合免疫种群和粒子群优化算法的方式,达到对动态滑模控制系统最佳参数寻找的目的[8-9]。免疫粒子群算法是将粒子群个体描述为滑模控制器的输出控制项u 的可行解,将寻找最优控制参数的过程模仿成粒子个体搜查的过程,是一种全局搜索的优化算法。设置Q为免疫种群,g 为供水系统的关系因子。免疫粒子群对滑模控制器的输出控制项进行优化的适应度计算公式如下:
通过对其赋值得到每个控制输入值的适应度,即:
式中:代表各免疫粒子的适应度概率用Pi(qi)描述;δ 代表免疫记忆细胞;qi表示迭代次数;N 代表粒子群规模;控制参数的适应度和需求类型的选择概率用Px描述,则有:
式中:控制参数u 的适应度用f(qi)描述。
依据式(16)获取适应度最小的免疫粒子作为滑模控制器的输出控制项u 的最优解,完成水轮机调节系统的最佳控制。
2 实验结果与分析
使用Octave 软件搭建仿真实验,深入研究本文设计水轮机调节系统动态滑膜控制系统的应用情况,水轮机调节系统的实验参数设置如表1 所示。

表1 水轮机调节系统参数Tab.1 Parameters of hydraulic turbine governing system
为验证研究的水轮机调节系统动态滑模控制系统的有效性和适配性,选择锯齿波信号和阶跃信号作为系统的输入,设定动态滑模控制器的跟踪轨迹,并通过与传统滑模控制器对比检验本文系统的有效性。两种控制器的锯齿波、阶跃信号参数如表2和表3 所示。

表2 动态滑模控制器参数Tab.2 Parameters of dynamic sliding mode controller

表3 传统滑模控制器参数Tab.3 Parameters of traditional sliding mode controller
对水轮机调节系统的追踪路线如图3 所示。由图3 可知,传统的滑模控制器在两种信号下的跟踪轨迹有偏差,而设计的动态滑模控制器能够保证水轮机调速装置在选定的轨道上平稳工作,同时在速度轨道跟踪上动态反馈效果良好,并且不管是阶跃还是锯齿波,所设计的动态滑模控制器均具备鲁棒性和强跟踪能力。

图3 不同信号下动态滑模控制的轨迹跟踪曲线Fig.3 Trajectory tracking curves of dynamic sliding mode control under different signals
为了分析比较研究所设计控制系统的动态滑模控制器和传统滑模控制器对水轮机调节系统的控制性能,利用两种控制器将水轮机稳定在随机的固定点,并采用两种控制器来调整系统的响应。在两种信号下的转速误差情况如图4 所示。由图4(a)可知,在阶跃信号下,两种控制器的转速在快稳定之前,传统滑模控制器抖振很严重,而且转速误差变化明显。而研究的动态滑模控制器没有出现明显的抖振现象,转速误差几乎为0,因此对水轮机调节系统的控制性起到了稳定的作用。由图4(b)可知,在锯齿波信号下,两种控制器的转速在稳定之后,传统滑模控制器依然有连续的抖振现象,而研究的动态滑模控制器依然平稳,而且误差几乎为0。因此对动态滑模控制器的应用可以控制水轮机调节系统稳定运行,具有良好的动态响应。
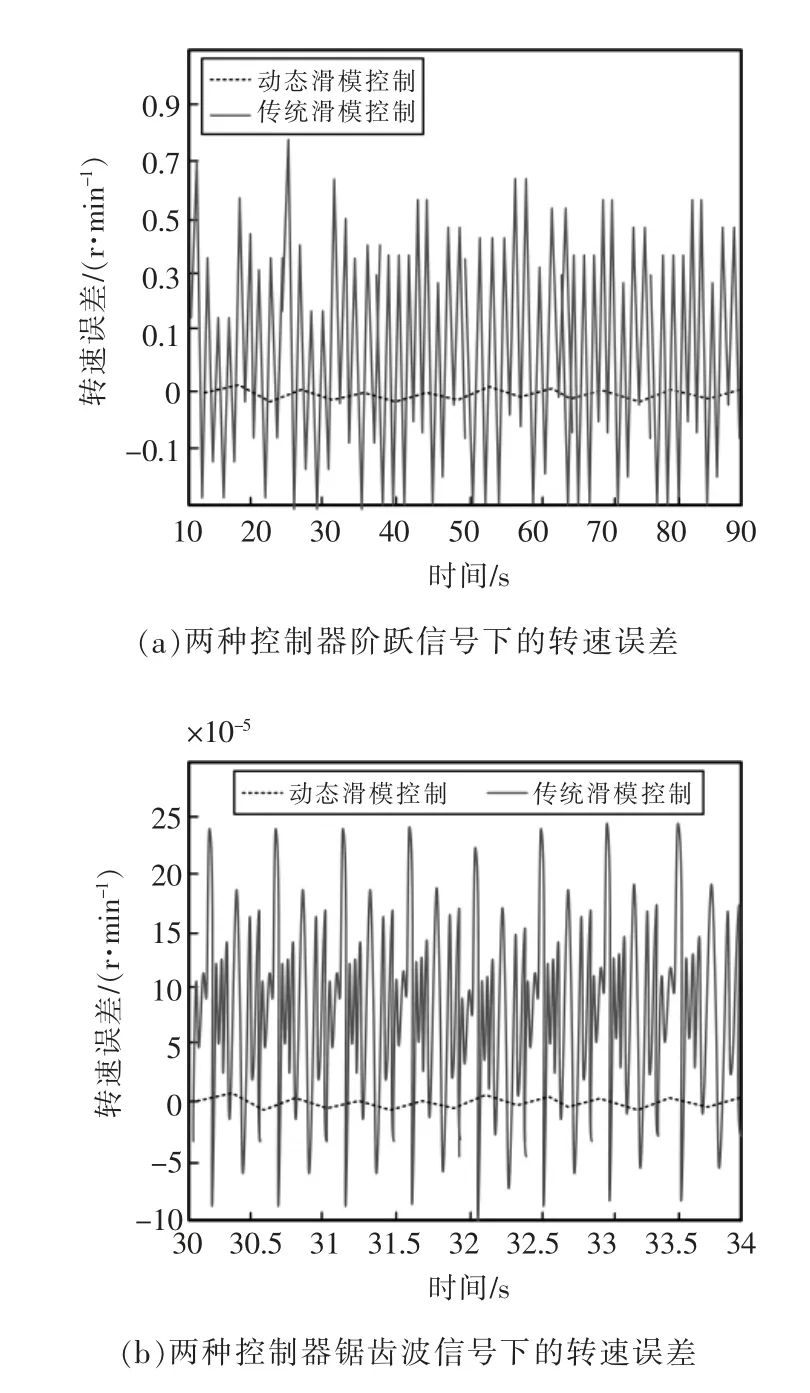
图4 控制器在不同参考信号下的转速误差Fig.4 Speed error of controller under different reference signals
为了验证免疫粒子群(IPSO)的性能,选取遗传算法(GA)和混沌算法(CA)对水轮机调节系统动态滑模控制器进行参数优化结果为对比。3 种算法的种群规模和最大迭代次数都相同。为了排除算法的随机性,对3 种算法分别独立运行100 次,统计结果得到最优控制参数如表4 所示。由表4 可知,经IPSO 算法得到的最优值、平均值和标准差相较于GA 和CA 算法均有明显降低,最优适应度值分别下降了2.12%和2.83%;平均适应度值分别下降了3.34%和1.35%。研究选用的IPSO 的标准差仅为0.0086,明显低于其他两种算法。因此,基于免疫粒子群优化的动态滑模控制器具有参数精度较高和稳定性好的优势。

表4 三种算法参数优化的统计结果Tab.4 Statistical results of parameter optimization of three algorithms
为了更加直观的比较,对3 种算法进行100 次独立计算得到最优适应度值,3 种算法收敛曲线如图5 所示。由图5 可知,GA 算法拥有较好的初始解,但是IPSO 算法的收敛速度明显快于其他两种算法,在13 代左右就已完成收敛,而GA 和CA 算法分别在21 和32 左右才成功收敛。实验结果表明,研究的免疫粒子群算法对动态滑模控制器参数的寻优能力优于GA 和CA 算法,效率更高,能够为水轮机调节系统的动态滑模控制器提供更优的参数选取方案。

图5 最优适应度值收敛曲线Fig.5 Convergence curve of optimal fitness value
3 结语
研究的基于免疫粒子群动态滑模控制系统,用于水轮机调节系统的精确跟踪控制。对研究的控制系统的实际应用效果进行相关数据分析,并确定免疫粒子群拥有计算精度高和收敛速率快的优势,为水轮机的控制系统提出更优的参数选取;同时,对动态滑模控制系统的研究比一般的滑模控制器有着更好的特性,该系统研究了在不同条件下都能够正确跟踪,并能够正确处理滑模的抖振问题,从而改善了水轮机调节系统的控制特性,具有高鲁棒性。
