高含水油田调驱过程控制智能优化方法
2024-03-06马旭东田兵兵刘小江
王 甜,马旭东,田兵兵,刘小江
(延安双丰集团有限公司,延安 716000)
在当今工业化发展势头迅猛的时代背景下,石油成为了每一个国家发展的不可或缺的战略资源。作为一种不可再生资源,石油被称为“工业血液”,关系到一个国家的发展甚至安全。因此,石油资源的开发开采问题不置可否地成为了我们国家需要解决的当务之急,同时也是国家发展战略中的重中之重。高含水油田智能定点调驱优化以提高采收率和降低成本为目标,是目前石化技术重点发展方向。传统油田调驱技术是油田开发中常用的技术手段[1-3],包括水平井水驱调控技术、聚合物微球深部调驱技术、井下油水分离技术。在传统油田调驱技术中,通过调整注采比例、改变油藏渗透率和孔隙度等特性[4],从而达到提高采收率的目的。智能油田调驱技术是一种利用人工智能、大数据分析等新一代信息技术手段[5],结合传统油田调驱技术,实现油田采收率、生产效率和资源利用率的智能化优化技术。相对于传统油田调驱技术,智能油田调驱技术更注重数据分析和预测模型的建立,以数据为基础、以智能模型为支撑,实现对油田生产的全过程、全方位的智能化管理,包括人工智能压裂新技术、智能纳米驱油新技术、“2-D 智能纳米黑卡”驱油控水技术。水平井水驱调控技术的应用对于解决主力油藏开发中的问题起到了积极的作用,油藏开发面临储层非均质性强、天然微裂缝发育等挑战,导致水平井开发区出现含水上升速度快、产量递减大、来水方向复杂等问题,传统的注采调控手段难以解决这些问题,制约了水平井的高效开发。人工智能优化压裂技术,不仅可以使产量提高10%~40%,还可以降低整体压裂作业成本,该技术需要在压裂液的组成、配比及喷射方向,压裂泵的功率配备、运行参数、压裂段数、每段射孔的簇数、簇间距等方面,针对不同区块的储层特点及裂缝特征进行优化设计。在某些油田中,已经建成了自动化采集和监控系统,用于实时监控油水井和生产设备等。这些系统使用智能油井远程监控系统或油田抽油机数据采集实时监控系统,可以实时监测抽油机的运行状态和井口生产数据。此外,系统还能够实现抽油机的远程启停控制,并能及时发现设备故障并自动报警,以便进行及时维修。这些系统的应用保障了油田采油作业的正常运行,并提高了作业效率。高含水油田是一种典型的难采油藏,其开采难度大、成本高、环境风险大等问题一直是油田开发的难点。以往的油田调驱优化研究中,常采用传统的统计分析方法,或者基于人工神经网络、支持向量机等机器学习算法进行预测和优化。然而,这些方法存在着一些局限性,例如,非线性拟合能力较差、对噪声敏感等。为了有效提高高含水油田的采收率,降低开采成本,需要采用先进的技术手段进行调驱优化。小波算法作为一种新兴的信号处理和分析技术,被广泛应用于油田调驱优化领域。小波算法可以对信号进行多尺度、非线性分析,具有多分辨率分析、局部性等优点[6],在油田调驱优化中,采用小波算法对油藏动态变化过程进行分析和预测,可以提高采收率和降低成本。因此,将小波算法应用于高含水油田智能定点调驱优化技术中,具有重要的应用价值和推广前景。
1 高含水油田调驱系统整体方案
油田调驱系统整体设计方案使用图像处理融合的方法,如图1 所示。本装置使用现场优化监控系统对油田成分实时优化,现场加装带旋转摄像头,摄像系统可以360°旋转。方案采用工业CCD 摄像头,将不同角度的拍摄视频通过云端上传PC,将处理后的图像与具有Sobel 算子的算法相结合进行分析,最后使用DSP 芯片处理接收信息。
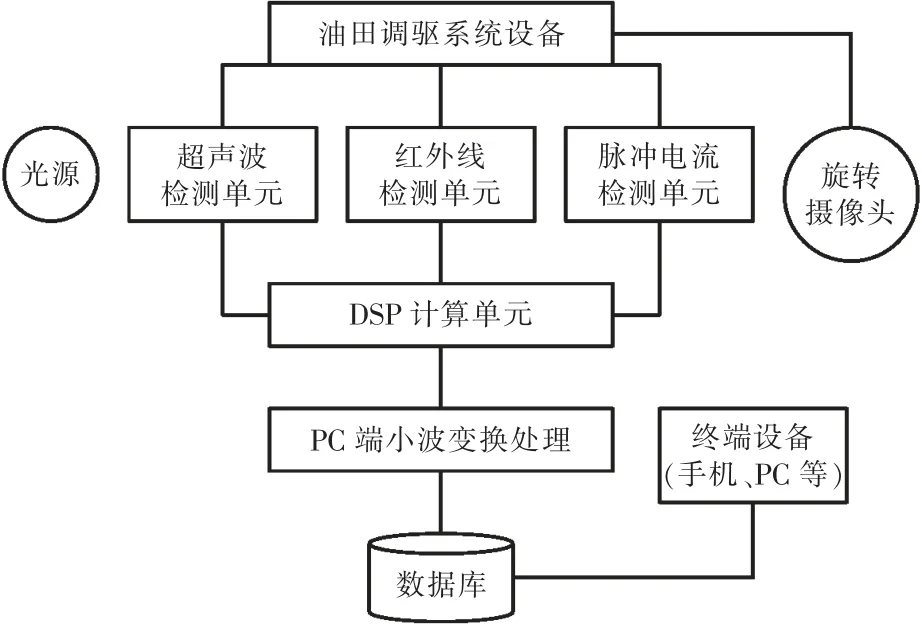
图1 油田调驱优化系统示意图Fig.1 Schematic diagram of oilfield profile control and flooding detection system
该系统采用TI 公司ADS5422 和DSP 芯片TMS-320C6203B,采集30 MHz、20 ms 高速数据,对模拟信号进行数字化处理,在PC 端处理数据,通过互连设备发送共享调驱过程数据,通过无线传输将分析数据传送到PDA、平板电脑等智能设备。
2 高含水油田调驱决策优化方案
在油田调驱过程传感器检测中,红外线单元的原理是依靠传感器的热敏感性发现温度异常现象,进而决策优化设备位置,由于调驱过程的热能变化这一特性,故红外传感器能够比其他传感器更易于获取数据。虽然红外线已普遍部署,但检测难以长时间持续,实时性的要求不容易满足,故还添加了超声模块。当油田调驱过程出现工况变化,会产生冲击波,从而被超声波传感器感应到,超声波传感器接收到的模拟信号在经过数字化处理、滤波放大处理之后,可以用于维修人员进行科学检查处理。超声波的优点是本身不会受到工作现场的强电磁信号的干扰,缺点是设备工作现场的干扰以及设备内部的复杂结构会引起超声波衰减、损耗,出现较大误差。脉冲电流检测单元可以检测调驱设备的电流信号,通过记录设备的电流波形和频谱分析波形和频谱,判断调驱过程是否需要决策优化,并定位调驱位置和调驱优化类型,从而实现对调驱过程的决策优化。采用脉冲电流法采集油田调驱过程的检测信号,进行小波变换处理,可以得到高含水油田调驱过程数据频谱图。对获取到的频谱图进行图像预处理,对图像归一化和灰度化操作,同时划分出训练样本集;对不同类型的局部放电灰度图像进行Sobel 特征处理,形成Sobel 特征向量,将提取的Sobel 特征向量送入分类器,实现调驱过程状态识别。选择无噪声方差的GCV 阈值选择函数来确定小波阈值,并利用果蝇优化算法进行自动搜索调参[7],计算GCV 阈值选择函数的阈值优化,同时将模拟退火算法的思想和人工调整因子引入果蝇优化算法进行优化。
2.1 GCV 阈值选取函数
本文选取的GCV 阈值选择函数是通过广义交叉验证得到的阈值,在一定程度上是基于最小均方误差的最优解。该方法在阈值选取过程中不需要噪声方差的参与,广义交叉验证(GCV)准则的阈值选择函数的表达式为
式中:N0为经过阈值处理后的小波的数量;N 为尺度变换下的高频率小波的数量;为高频率小波系数;为经过阈值处理后的高频率小波系数。当GCV 的值最小时,此时的阈值即为当前的最优阈值:
采用GCV 阈值选取函数时,小波系数的阈值处理也参与运算,阈值的信号均方差的表达式为
式中:vj,k表示原始信号的高频小波系数;当N 取较大值时,如果能够得到当前情况下的阈值m 为最优阈值,MES 一定存在最小值,即:
设E 为数学期望,推导可得当N→∞有:
存在λm的某个领域范围内,有如下情况:
综上所述,采用GCV 阈值,提高了整体算法的准确性。
2.2 果蝇优化算法
果蝇在寻找食物时,先利用嗅觉确定食物的大概位置,然后沿着位置的方向搜索,再依靠视觉系统确定食物源的大概位置和其他果蝇的位置,最后根据位置之间的特殊关系飞向食物所在的方向。果蝇寻找食物的示意图如图2 所示。

图2 果蝇搜寻食物示意图Fig.2 Schematic diagram of fruit fly searching for food
通过进化果蝇的觅食过程,果蝇的优化算法可以分为3 个步骤:
(1)参数初始化:首先需要设置果蝇的种群数量和初始位置,种群数量决定了算法的搜索能力,而初始位置则影响了搜索的起点和探索范围,合理的参数设置可以提高算法的性能和收敛速度。
(2)嗅觉搜索:在嗅觉搜索阶段,果蝇通过嗅觉系统感知周围环境,确定食物的方向,并沿着食物方向进行搜索。这一步骤类似于算法中的局部搜索过程,通过利用局部信息来寻找当前最优解。果蝇优化算法通常采用随机扰动的方式来增加搜索的多样性,以克服局部最优解陷阱。
(3)视觉搜索:在视觉搜索阶段,果蝇通过视觉系统判断自身与果蝇种群和食物源之间的位置关系,并根据位置关系飞向食物源。这一步骤类似于算法中的全局搜索过程,通过利用全局信息来寻找更优的解。果蝇优化算法通常采用一种自适应的策略来平衡局部搜索和全局搜索,以保持搜索的多样性和收敛性。
2.3 改进小波变换阈值选取算法
根据果蝇算法原理,果蝇在搜索食物时步长是随机的,步长设置如下:
式中:l 为果蝇搜索的初始化步长;Rand()为0~1 上的随机函数;L 的范围在0~1 之间。在处理问题时,倾向于在迭代初期选择较大的搜索步长,以保证最优解在其搜索范围内,从而保证算法的搜索效率。以下公式是对步长的改进:
3 实验验证与分析
3.1 实验软硬件环境介绍
实验运行软硬件环境如表1 所示。
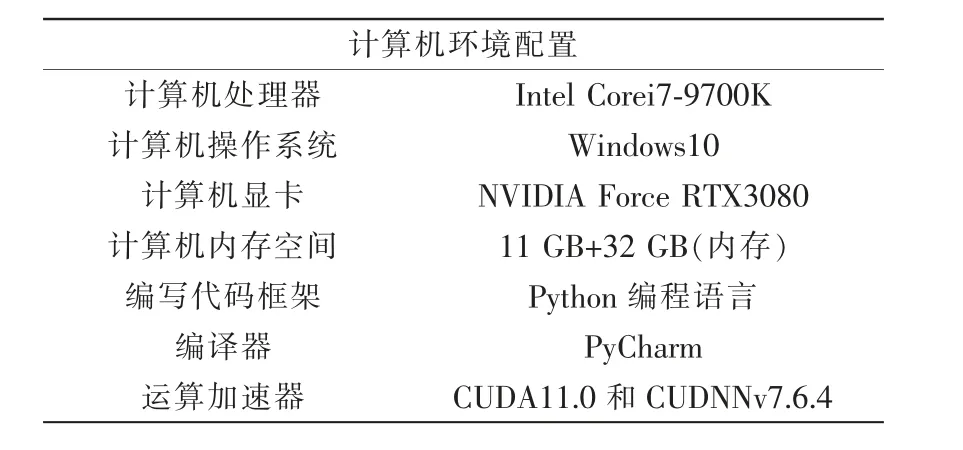
表1 实验硬件描述Tab.1 Experimental hardware description
3.2 实验过程及结果
图3 为油田调驱测试点示意图,选择4 个不同位点,对决策优化效果实验。
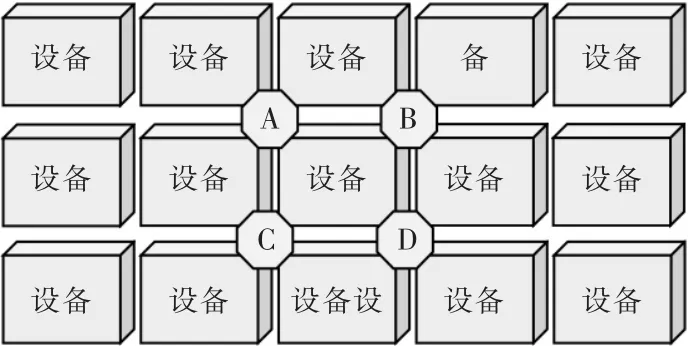
图3 油田调驱测试点Fig.3 Electrical equipment testting points
本实验选取A、B、C、D 4 个位点,实验设定次数为40 次,通过实验分析系统算法的有效性,主要用到的实验方案有以下4 种。
(1)Bayes 方案:基于关联规则的分类算法,算法的分类过程主要包括:寻找类别属性值;从已发现的类别关联规则中,优先挑选出高优先度的规则。将这种规则作为最终的分类结果。Bayes 基本公式如下:
(2)Fisher 方案:目标是选择一个投影轴,使得同类样本在该轴上的投影值的类内方差最小,而不同类样本的投影值的类间方差最大。可以将原始数据在保留类别信息的同时,将其映射到低维空间。目标函数如下:
(3)改进小波变换方案:本文使用改进小波变换阈值去噪算法进行油田设备调驱决策优化,选用不需要噪声方差参与的GCV 阈值选取函数确定小波阈值,并使用结合了模拟退火算法的思想和人工调节因子的果蝇寻优算法进行训练。
(4)径向基函数神经网络(radical basis function,RBF)方案:
式中:ci为指定中心点;σ2为RBF 函数的作用范围,值越小,说明作用范围越宽,反之则越窄。径向基函数神经网络具有其他前向网络所不具有的最佳逼近性能和全局最优。
为了证明本文改进的油田调驱优化的性能,进行对比实验,如表2 所示。对于未安装摄像头的测试,3 种方法的准确率均明显低于使用摄像头的情况,可以看到加装旋转摄像头对提高精度有较大作用。

表2 与其他方法比较结果Tab.2 Compare results with other methods
4 结语
本研究基于高含水油田智能定点调驱结合图像处理技术和传感器技术,引入旋转摄像头和脉冲电流单元,同时提出了一种基于引入小波变换的电测法对油田调驱设备进行决策优化的方法,有效地优化了设备的决策问题。实验结果表明,旋转摄像头和脉冲电流单元能够实现对油田生产过程的全面监测和诊断,相比传统的基于Bayes、Fisher、RBF方案和改进小波方案,本研究提出的方案在识别准确率上有了明显提升,实现对油田调驱过程的监测和诊断。未来将进一步优化旋转摄像头和脉冲电流优化单元,研究更加高效的油田智能调控和优化算法,提高设备监测的精度和可靠性。进一步提高生产效率和经济效益,如人工智能、大数据和物联网等油田智能化管理调度系统相关技术,实现对油田调驱过程的全面智能化监控和控制。
