煤矿井下HBi-LSTM 地磁定位算法研究*
2024-03-06崔丽珍
郝 婷,崔丽珍,杨 勇
(内蒙古科技大学信息工程学院,内蒙古 包头 014010)
在过去的几十年中,为应对基于位置的服务(Location Based Services,LBS)日益增长的需求,在定位领域已经进行了大量研究[1]。其中,大多数定位系统均可用于室外环境,但由于人类运动的复杂性和基础设施对无线电信号的干扰,它们在室内区域无法提供可靠定位信息[2]。为了解决室内定位问题,特别是煤矿井下这样的特殊环境,提出了指纹识别技术。通过对室内环境中信号特征进行提取和划分,将预定义的位置与测量的指纹相关联,建立指纹数据库;之后将捕获的指纹与训练指纹进行比较来估计目标位置。使用Wi-Fi、蓝牙等信号作为指纹信息存在许多局限性:它们的定位精度较低,信号易受干扰[3]且建库更新成本较高。为寻找到更合适的指纹信息,研究人员提出基于磁场数据的指纹识别定位方法[4-5]。磁场无处不在、变化甚微,且在位置方面具有足够的多样性,使用磁场信号作为指纹能够确保指纹的奇异性。此外,磁力计嵌入在日常使用的设备中,采集磁场数据较为方便。
随着计算能力的进步,在利用磁场数据进行指纹识别定位方法的研究中,循环神经网络(Recurrent Neural Network,RNN)被广泛使用[6]。Jang 等[7-8]通过调整隐藏节点的数量来构建优化RNN 模型,将RNN 应用于基于地磁场的室内定位。在21.47×10.17 m2的测试台上,磁图和BLE 地图均使用629个参考点,间距为57cm。从地磁场图中生成了一百万条步行模式的痕迹,并用于训练和评估。除了基本的RNN,还有两种最常见的高级RNN,即长短期记忆网络(Long Short-Term Memory,LSTM)[9]和门控循环单元(Gate Recurrent Unit,GRU)[10]。当使用基本的RNN 时,误差函数的梯度在反向传播期间会随着时间呈指数增长或衰减。随着层数的增加,这会导致过去输入数据丢失,降低学习性能。为解决这个问题,LSTM 通过添加单元状态使其可以有效地处理远程依赖关系。Bae 和Choi 将基本的RNN 和LSTM 模型用于两个中型和大型测试台。结果表明,使用基于地磁场信号的LSTM 模型的系统性能大大优于基于RNN 模型的定位系统。Bhattarai 和Yadav 使用基于LSTM 的DRNN 在两个门内环境中进行地标分类,将磁场强度的可变长度序列作为输入来对位置进行分类。
目前煤矿井下主要采用的是基于无线信号定位技术方案,井下环境对无线信号的传播具有很大干扰,定位性能不太稳定。相比之下,地磁定位不需要网络和基站,便于与其他定位方法融合,能更好地适应矿井下的特殊环境。因此,地磁定位技术[11]在煤矿井下定位领域具有较强的应用优势。
为更好解决煤矿井下人员定位精度问题,考虑到地磁接收信号的时域连续性,充分利用数据信息,更好地实现序列与位置标签的映射惯性,本文采用地磁信号作为指纹特征,提出HBi-LSTM 训练模型,通过分层双向结构充分提取“上下文”地磁长短时间序列中的信息,确定当前时刻的位置。
1 Bi-LSTM 理论
在单向的LSTM 网络中,模型只能在以前的内容上工作,无法使用未来的的信息进行预测,具有一定的局限性。因此,前向LSTM 结合一个后向LSTM组成的双向长短时记忆网络(Bi-directional Long Short-Term Memory,Bi-LSTM)开始被广泛使用。
双向长短时记忆网络原理如图1 所示,Bi-LSTM 的主体结构是由两个单向LSTM 组成,在每个时刻t,输入会同时提供给前向和后向的LSTM,前向LSTM 学习t时刻及t时刻之前的序列信息,后向LSTM 学习t时刻及t时刻之后的序列信息,在输出时由这两个反向的LSTM 同时决定。前向LSTM 层t时刻的输出记作,后向LSTM 层t时刻的输出结果记作,两个LSTM 层输出的向量可以进行相加、求平均值等方式处理。
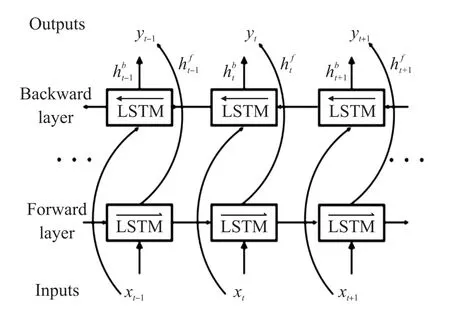
图1 Bi-LSTM 原理图
前向LSTM 的计算过程如式(1)所示,后向LSTM 计算式(2)所示:
式(1)与式(2)中:f是输出函数,w是对应的权重系数;式(3)中g是组合函数;模型最后的输出结果由式(3)得到。
2 HBi-LSTM 地磁定位算法
基于HBi-LSTM 模型的地磁指纹定位流程如图2所示,包括离线建库与在线定位两个阶段。离线建库阶段主要为利用设备对井下环境进行数据采集,通过将数据特征结合定位拓扑图建立地磁指纹数据库,将定位点与相应的地磁序列匹配[12-13];利用地磁序列增广算法和训练数据,实现模型训练和优化,构建出HBi-LSTM 定位模型。在线定位阶段主要通过实时收集地磁数据,并利用步长检测算法对已收集到的的地磁序列进行重采样,利用已构建好的指纹数据库和训练出来的模型为用户的定位做出判断[14]。
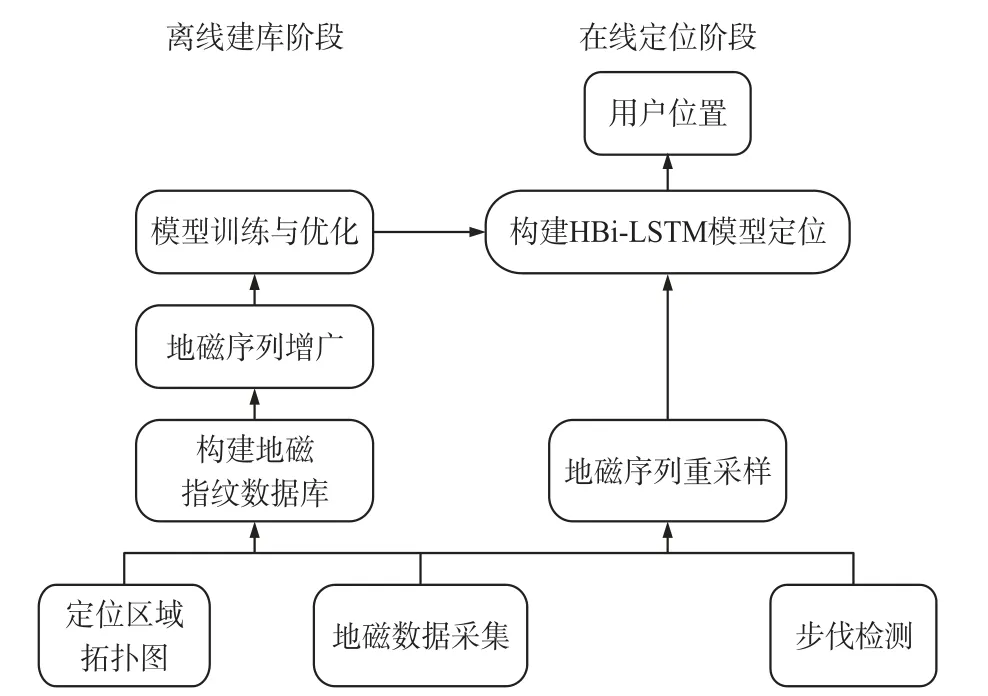
图2 基于HBi-LSTM 的地磁序列定位流程
为提高模型的定位精度,增加算法的适用性,使算法可以更准确地确定不同矿工在不同运动情况下的定位,在定位过程中增加了步伐检测功能[15-16],可以即时记录所有矿工的步数。采用地磁序列重采样算法,通过调整定位阶段地磁序列密度,有效完成不同速率下的地磁定位。
Bi-LSTM 可以很好地处理地磁序列的依赖关系,同时能够避免RNN 存在的梯度消失和梯度爆炸问题。为了进一步提高定位精度,本文提出的定位模型是在原有Bi-LSTM 模型的基础上,进行了分层处理,称为HBi-LSTM 定位模型。LSTM 分层结构是学习了它在NLP 中的应用,分层处理能够增强原有模型的学习能力,更好地获取数据特征。在采集地磁序列数据时,每条数据的变化趋势各不相同,通过在Bi-LSTM 模型基础上引入分层结构能够更好学习序列数据与对应位置的映射关系。
本文提出的HBi-LSTM 地磁定位模型如图3所示。首先进行数据处理:利用滑动窗口将一个完整的地磁序列分割成许多连续的地磁子序列,使用子序列级LSTM 网络从每个子序列中提取局部异常特征地磁信号;然后进行Bi-LSTM 学习:将地磁子序列分别输入到Bi-LSTM 模型中,模型会通过前向和后向对同一序列数据学习两次,产生两个预测结果;最后进行分层处理:利用学习上下文的全序列级Bi-LSTM 网络探索不同预测结果之间的关系,在离线训练阶段根据损失函数进行网络整体的参数调整,在线定位阶段目标位置通过全连接层来进行预测。

图3 HBi-LSTM 地磁定位模型
3 实验与分析
3.1 数据采集
本文实验场景为内蒙古自治区包头市高头窑煤矿井下巷道,实验区域为80 m×5 m×3 m 的空间范围。采集数据APP 是由我们实验室自主研发的,采集界面如图4 所示,实验场景如图5 所示。
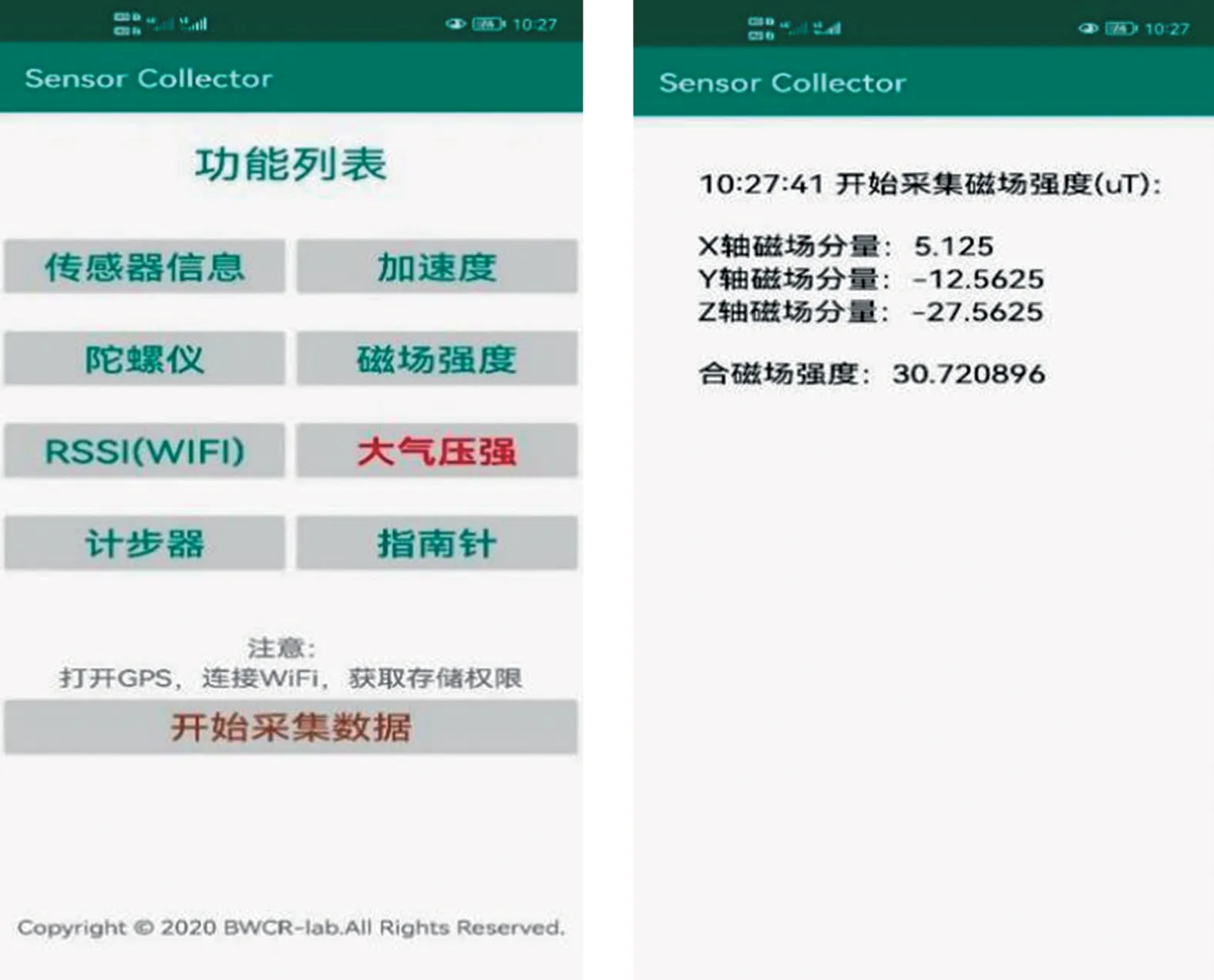
图4 数据采集APP 界面

图5 实验场景图
3.2 实验方案
建立指纹库:固定方向手持矿用手机,利用手机安装的数据采集APP 按照指定路径轨迹匀速采集地磁序列[17],将采集到的数据序列用于构建井下地磁指纹库;
在线采集:矿工按照固定方向手持矿用手机,利用手机安装的数据采集APP 按照随机运动采集地磁序列,均匀地对每条路径按固定长度进行标记,将标记点作为真实位置坐标进行定位精度对比。规划的路径彼此之间相差0.8 m,采集的序列尽可能大地覆盖实验区域。
3.3 数据分析与处理
3.3.1 地磁数据特征
按实验方案在井下定位区域采集地磁数据序列,将采集到的序列进行预处理并分析数据特征。图6(a)所示为井下巷道同一路径不同时间采集的地磁数据,地磁强度的变化趋势相似性较高,具有时间稳定性;图6(b)所示为井下不同路径同一时间磁强度变化趋势,两条路径之前存在较大的差异性,具有空间区分性。
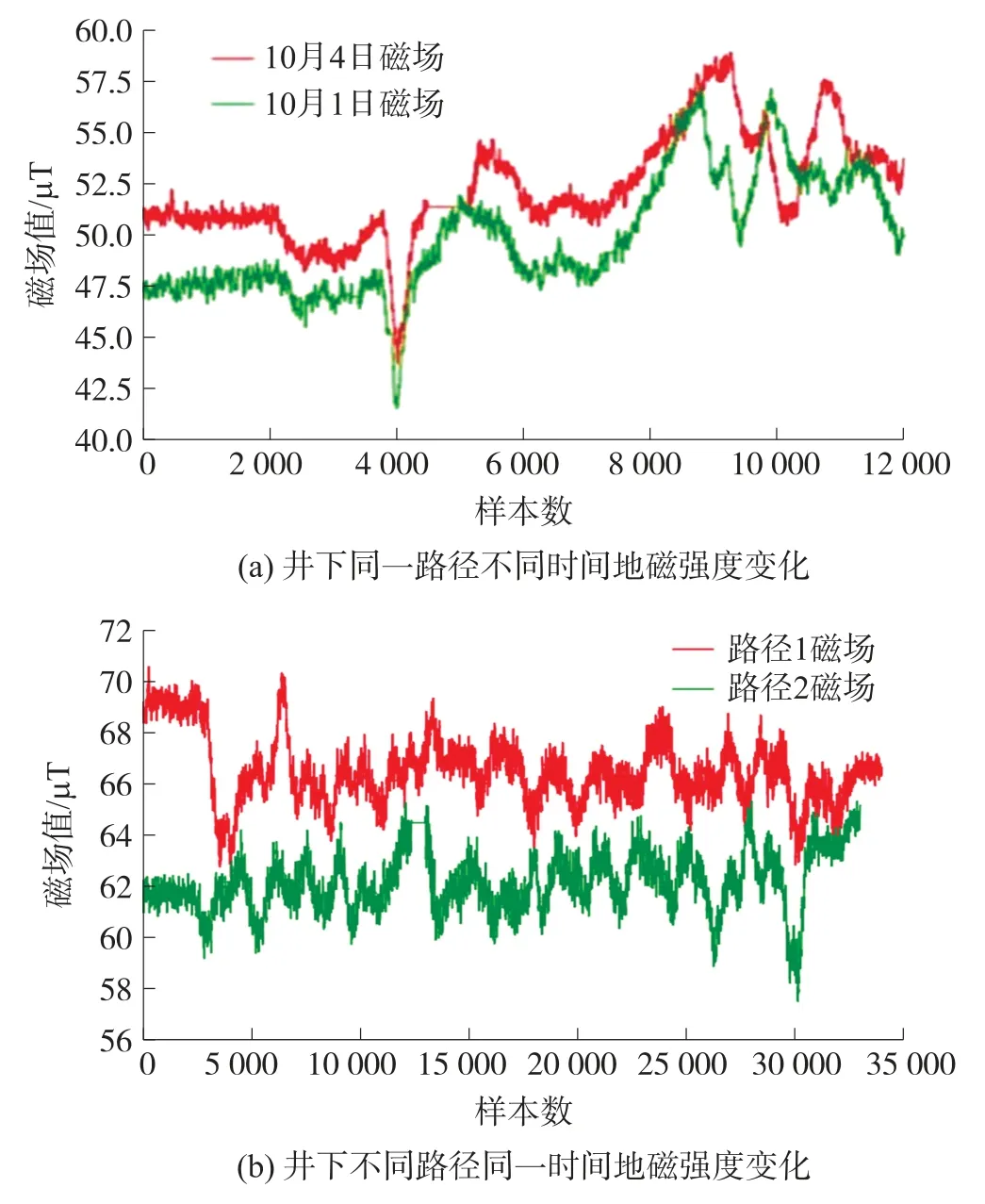
图6 井下地磁特征
3.3.2 地磁数据处理
将采集到的地磁数据按8 ∶2 比例分为训练集和测试集。其中每段地磁序列与坐标区域相对应,将采集到的地磁序列与标签相对应,形成一个样本[Rt,Pt],其中Rt表示t时刻采集到的地磁序列,Pt表示t时刻对应的定位坐标。
通过处理数据发现采集到的地磁强度值一般都在Rmin=20 μT 到Rmax=80 μT 之间。因此,本文利用式(4)进行归一化。
按照HBi-LSTM 模型的输入要求,需要利用滑动窗口将数据库中的数据再次进行处理,将滑动窗口的长度设为3 s,将序列中间数据对应的位置作为整个序列对应的位置,组合结果见表1。

表1 训练数据库
在本文实验中,利用TensorFlow 神经网络框架构建HBi-LSTM 算法,其主要参数设置如下,Rt的维度根据采样频率来确定,batch 大小设为128,dropout_rate 设为0.2,初始学习率设为0.01,选用Adam 优化器,损失函数为均方误差函数。
3.4 结果分析
LSTM 和HBi-LSTM 两种模型的定位精度结果如表2 所示,以均方误差为衡量标准,图7 为两种模型在相同环境下的定位误差CDF 图。
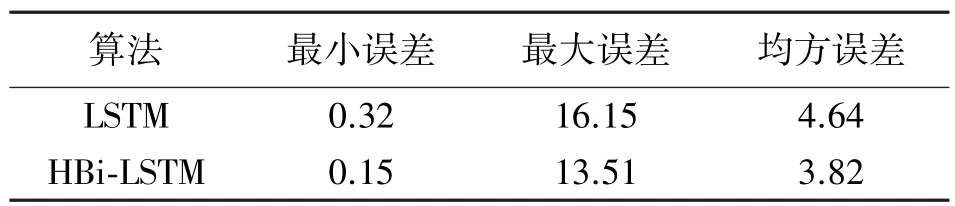
表2 两种网络在测试集中的精度结果 单位:m
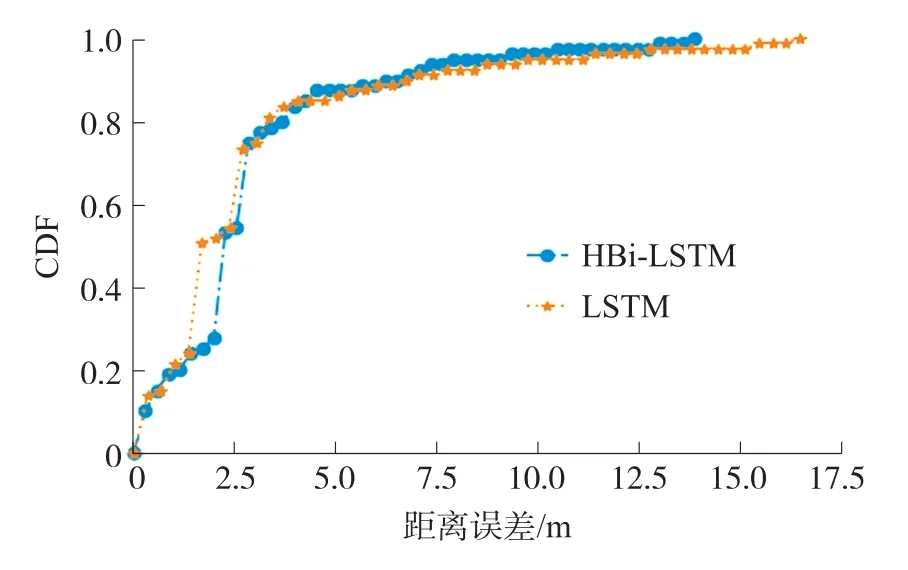
图7 HBi-LSTM 和LSTM 在相同环境下的定位误差CDF 图
通过对比表2 中结果和图7 两种模型的CDF图可以得到,单纯的LSTM 模型定位精度较差,因为其只对输入数据进行单向学习,当采用HBi-LSTM模型时,模型能更加充分地学习到数据序列中包含的信息,外部环境稍微变化时并不会立即影响地磁数据中的深层特征,所以HBi-LSTM 模型的抗干扰能力变强,定位精度有所提高。
本文同时对输入不同的长度地磁序列带来的定位精度影响进行了研究,为了降低模型的复杂性,本文仅对序列长度为1 s~3 s 的数据进行不同模型的定位结果对比,如表3 所示,对比标准为定位结果的均方误差。
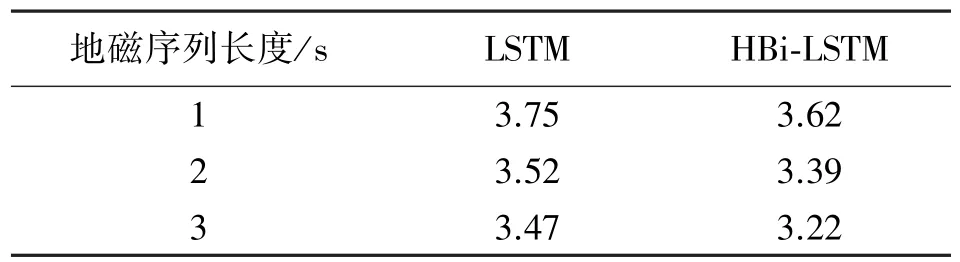
表3 不同地磁序列长度定位精度 单位:m
由表3 中可以得出,序列长度为1 时,由于时间信息较短,LSTM 模型与HBi-LSTM 模型均未利用到定位过程的时间信息,均方误差较大,定位精度低;随着序列长度的增加,两个模型的优势逐渐体现,序列越长,均方误差越小,定位精度越高;相同长度的地磁序列,新提出的HBi-LSTM 模型比LSTM 模型的定位精度更高,井下定位精度能达到3.22 m。图8 为两种模型对输入不同长度地磁序列的定位误差CDF 图,比较图8(a)和图8(b)可以得到,加入双向与分层机制的LSTM 较单向LSTM 模型的定位误差收敛加快,井下定位更精确。
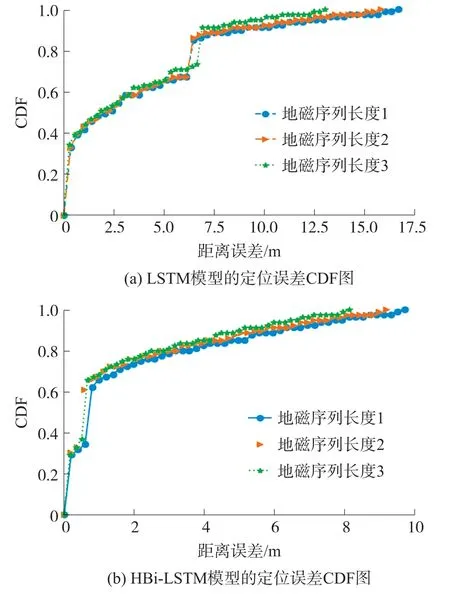
图8 两种模型对输入不同长度地磁序列的定位误差CDF 图
4 结论
本文在单向LSTM 模型处理时间序列的基础上增加了双向与分层机制,提出了HBi-LSTM 井下人员定位模型。由于地磁数据具有空间区分性,而且井下三轴的地磁数据受姿态影响,定位特征变化无规律,井下定位精度不高,因此本文利用合成磁场强度进行定位;通过分析井下磁场序列的信号特征构建指纹库并利用提出的HBi-LSTM 模型来记忆面向井下拓扑结构的地磁指纹图,使地磁序列可以更好地对应位置标签。实验结果表明,本文提出的HBi-LSTM 模型与LSTM 相比较,HBi-LSTM 模型对地磁序列信息学习更充分,对噪声适应性更强,定位精度更高。
