基于PWM控制的逆变器仿真及谐波抑制研究
2024-03-05曹爱斌李振华彭黎原
曹爱斌,李振华,喻 鸣,彭黎原
(1.中国航空工业集团公司 西安航空计算技术研究所,陕西 西安 710000;2.中国航发湖南动力机械研究所,湖南 株洲 412000)
1 概述
逆变器是直流-交流的重要工具,在逆变电路中,期望输出的电压波形是一个正弦电压波形,使用PWM技术用于逆变电路的控制电路即可达到此目的,传统的交流PWM技术使用正弦波来调制三角波,因此称为正弦脉冲宽度调制。PWM技术动态响应好、控制简单、灵活,因此被广泛运用,但普通PWM技术的输出电压带有一定的谐波分量,本文对PWM控制的逆变电路进行仿真并对抑制谐波技术进行分析。
2 三相桥式逆变电路
在逆变电路的多种结构形式中,三相桥式逆变电路是最常用的[1]。其开关器件采用IGBT[2],电路如图1所示,负载中性点为N,在模型左端,即直流侧只加一个电容就可以达到电路的需要,为了便于分析将其分开,画成两个电容,并且在他们的中间标注假设中点N′。在导通方式上有180°导通型和120°导通型,其中180°导通方式被广泛使用。该文章即采用为180°导通方式[3]。即同一相的一对桥臂交替导通,在某一时刻可能是上面两臂下面一臂导通,也可能是下面一桥臂上面两桥臂。每当进行电流换流时在同一相的上下两桥臂之间进行,因为此特点,将之称为纵向换流,U、V、W相顺序导通,V相和W相各延迟120°和240°导通。
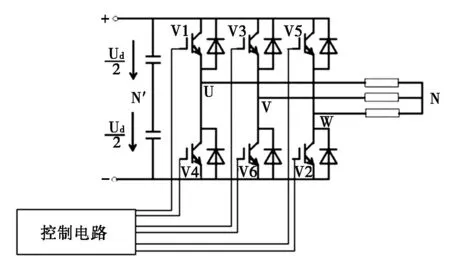
图1 PWM控制的三相电压型逆变器
其具体工作状态为表1。其中各个IGBT管子每隔60°导通,各个器件开通180°后关断,顺序为V1→V2→V3→V4→V5→V6。设U、V、W三相桥臂,每相上桥臂导通记为1,下桥臂导通记为0,根据表1其状态转换顺序为101→100→110→010→011→001。

表1 不同时刻开关元件导通关断状态
对于U相来说,当上桥臂V1开通的时候,uUN′=Ud/2,当桥臂4开通的时候uUN′=-Ud/2,uUN′波形为幅值是1/2Ud的矩形波。V,W两相与U相类似,uVN′,uWN′的波形与uUN′相同,但是其相位各迟滞120°。
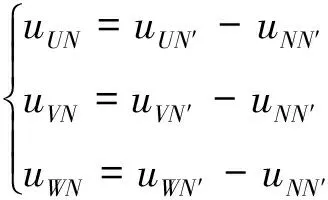
负载线电压uUV,uVW,uWU可由式(1)求出:

(1)
假设文章中的负载中性点N与前文假设的N′之间电压为uNN′,式(2)为负载U、V、W相电压。
(2)
将上面式(1)和式(2)整理求得式(3)。

(3)
假定负载是三相对称性的,则uUN+uVN+uWN=0,故有式(4):

(4)
可知是fuNN′=3fuUN′,且幅值是1/3即Ud/6的矩形波。
以逆变器控制电路的结构作为划分依据,可大致分成三种:比较器型、ROM数据存储型、定时型。本文使用比较器型。
依据调制脉冲的极性来分类,根据其在1/2周期的波形曲线可以分为单极性和双极性两种形式。本文讨论双极性[4]。双极性PWM即在半个周期内波形曲线穿越x轴,单极性即为只在一侧。
如图2为低电平(上)和高电平(下)的双极性的U相输出电压波形,可知,两者相似之处在于:在1/4个周期内有开关时刻,具体的在[0,π]区间以π/2点轴对称,并且在区间以点轴对称。总结其输出电压波形特点即为既是奇函数又是奇谐函数[5]。对于三相电压型逆变器,逆变器为三相对称系统[6]。所以3的倍数的谐波会被互相抵消,偶次正弦分量也为零。下图所列出为U相输出电压波形,对U相波形移相120°得到V相,对V相波形移相120°得到W相波形。
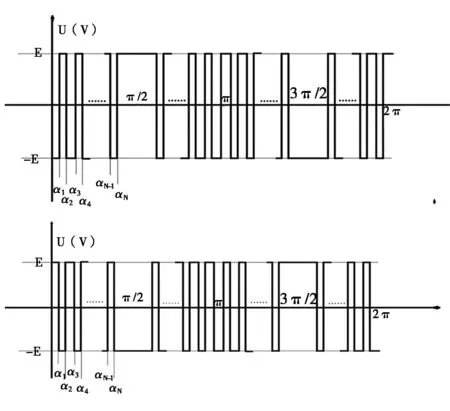
图2 双极性相电压波形
3 仿真研究
用Simulink搭建三相桥式电路[7]。图3中使用6个IGBT和6个二极管以及6个PWM发生器,构成了逆变器所用的控制电路。PWM发生器负责决定6个IGBT的打开与关闭。在仿真中添加5个Scope器件,由上而下分别测定U相电流,U相电压,UUV线电压,UNN′和UUN,其波形图如下。模型中添加GUI元件,可以对各个示波器波形作FFT分析[8]。其模型为图3,验证了三相桥式逆变器搭建的正确性。

图3 三相桥逆变电路
图中五个示波器顺序如下:从上而下分别测定U相电流,U相电压,UUV线电压,UNN′和UUN。其中,iu波形规律为,桥臂1中的V1从开通状态转换到断开状态时,由于负载RLC中有电感分量,由电感的特性得知,其中的电流不能突然发生改变,所以桥臂4中VD4的先导通续流,直到电流降到零时,桥臂4中的电流才能反向,至此V4才开始导通。

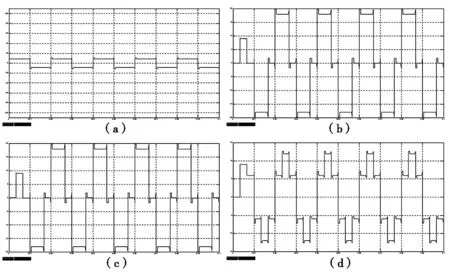
图4 电压波形分析
对其进行FFT分析,可得图5各谐波含量图。

图5 谐波含量分析
由图5可见其电压中各谐波含量,可见3及3的倍次谐波相互抵消,为零,偶次谐波值也很低,其主要低次谐波为第5,7,11,13次。由PWM脉冲宽度调制后,存在第5、7、11、13次谐波,这些谐波分量在某些调速系统中会导致其性能受到影响。目前,对于谐波的抑制技术主要有:特定谐波消除PWM控制技术(SHEPWM技术)、重复控制和PID控制互相并联法等。其中SHEPWM技术具有以下一些优点:维持开关频率为定值,输出电压的波形可以达到最佳;提高波形的质量,将直流侧电流纹波进行调整,使其减小;在波形质量一定的情况下,可以进一步降低开关频率,使开关损耗减小,从而改善了直流变交流的转换效率,此技术有很强的实用性,可以使输出的波形质量得到很大的提高,因此使得特定谐波消除PWM(SHEPWM)技术的研究成为交流调速领域的研究热点,SHEPWM技术可以选择性消除低次谐波和降低开关损耗,提高输出波形质量等。
SHEPWM技术难点在于其初值的选取和对非线性超越方程组的求解,求解方式分为查表法和牛顿迭代法,其中查表法不利于进行实时求解,牛顿迭代法对于初值的选取要求较高,初值的选取要尽可能接近要求解的精确值才会快速收敛。牛顿迭代法是利用了泰勒级数来展开,用其来拟合非线性回归模型,通过不断地重复迭代过程,使其回归系数不断贴近非线性方程组的参数,通过设定一定的循环条件,达到所要求解的精度。
利用牛顿迭代法对上述方程组进行求解,给出了牛顿迭代法原理及求解步骤,可获得逆变器在1/4周期内多次换向的开关时刻,根据逆变器一个周期内电压波形为奇函数且为奇谐函数的特点将1/4周期内的开关时刻扩展到整个周期,并根据一个周期的工作计算得知了其对应的开关时刻。开关角求解流程如图6。
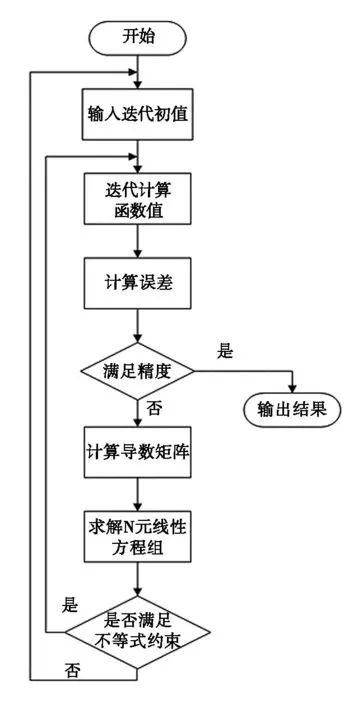
图6 开关角求解流程图
4 结语
本文对PWM控制的三相电压型逆变器进行了研究,分析了PWM技术的控制规律和的学模型,搭建Simulink仿真模型对各段波形仿真分析。对产生的5、7、11、13次谐波进行分析,对主流抑制谐波技术中的特性谐波消除PWM技术(SHEPEM)进行研究,并给出相应逆变器开关角求解流程。
[1] 王志腾.并网逆变电路的控制器设计与故障诊断[D].吉林:东北电力大学,2023.
[2] 李雪荣,许浩,范伟,等.多制式高频辅助变流器模块设计[J].机车电传动,2020(2):31-36.
[3] 王天凤,梁子卫,林伟明.单相SPWM逆变电路的实验教学研究与实践[J].仪表技术,2023(1):54-56,74.
[4] 龚仁喜,林宇航.一种高效光伏逆变器的PWM策略[J].电力电子技术,2023,57(6):130-133.
[5] 梁欢,张琦,唐雨,等.用于并网逆变器谐波抑制的重复控制策略研究[J].电力电子技术,2022,56(9):5-7,11.
[6] 叶满园,苗志林,陈子豪,等.电容电压自均衡多电平逆变器SHEPWM控制策略研究[J].高电压技术,2022,48(5):1952-1960.
[7] 田素娟.可逆PWM逆变器及其MATLAB仿真[J].内蒙古科技与经济,2022(14):101-102,105.
[8] 余敏,郝正航,陈卓,等.实时仿真器的PWM逆变器实验方法[J].实验室研究与探索,2019,38(12):98-101.