基于GA改进ANN算法的车载网控系统故障诊断
2024-03-05杨慧荣
杨慧荣
(河南工业贸易职业学院 汽车工程学院,河南 郑州 451191)
0 引言
车载网控系统是保证运行安全的一类重要控制设备,也是确保铁路系统稳定运行的核心部件。根据实际统计数据可知,车载网控系统出现故障的情况较多[1-2]。现阶段,如果还是根据工作人员自身经验来检测车载网控系统故障将无法适应现代化交通运输的高速运行要求,必须开发更加高效的车载网控系统故障检测才能满足应用需求[3-4]。由于ANN是以随机方式来选择初始权值与阈值,从而产生局部极小值,导致每次训练将会得到差异较大的结果[5]。最初选择得到的故障特征具有一定冗余和相容性,RoughSets理论可以实现定性分析以及遗传算法功能,从而完成数据的降维处理并选择得到合适的特征[6]。王雪[7]提出了基于系统调用序列实现车载主机设备,构建了基于网格搜索-K近邻的入侵检测模型,试验证明提出方法能够实现网络入侵的有效检测。闻品[8]针对动车组内无线通信质量问题,运用CST电磁仿真建立车厢内部车载天线布局模型,将车内传输效果与自由空间进行对比,验证了所设计天线的有效性及其布局的可靠性。
本文在粗糙集以及遗传ANN方法基础上构建得到车载故障诊断模型。之后把寻优结果代到神经网络内再以BP算法完成训练。通过上述方法使ANN泛化方法充分发挥出来映射性能,同时可以防止产生局部极小值的情况,获得更高的分类精度。该方法可以确保在正常分类能力的基础上,实现对原有样本集的充分简化,从而获得更高的训练效率。
1 车载网控系统
CTCS-3车载系统通常选择C2/C3一体化方法,并且基本采用分布式结构,对于300T车载双系设备进行分析可知,其核心控制模块属于一种“单硬件双软件”结构,通过车载网控系统Profibus总线跟车辆MVB双总线连接[9]。在CTCS3-300T车载网控系统中,各组成部分包括CTCS-3控制单元(ATPCU)、测速测距单元(SDU)、CTCS-2控制单元(C2CU)、轨道电路信息接收单元(TCR)、应答器信息接收模块(BTM+CAU)、司法记录单元(JRU)、人机界面(DMI)、安全无线传输单元((STU-V)、网关(TSG)、安全数字输入输出单元(VDX)等。
2 GA优化ANN
利用GA实现对ANN初始权阈值的优化过程,促进网络学习过程更快完成收敛过程,完成ANN优化之后可以更加高效输出预测函数,图1为GA优化ANN流程图[10]。具体步骤如下所示。
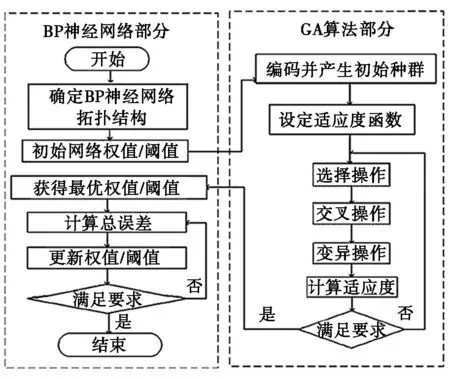
图1 GA优化ANN流程图
利用适应度函数来评估种群内个体,表现出来性能优良结果,当适应度提高后,被选中的概率也会提高,先缩小以神经网络得到的最优解范围,之后利用BP算法实施精确计算,避免神经网络出现局部极小的情况,显著提高收敛速度,有效控制训练次数。将神经网络误差能量作为目标函数时,应尽量控制误差到较小值;通过遗传算法来优化ANN时,需尽量提高适应度值,将GA适应度函数F表示为如下形式:

F=(E+α)-1.
式中,N代表种群的规模;y′(k)与y(k)依次对应该神经网络的第k个节点期望输出值和实际结果;α属于很小的正数。
3 故障诊断分析
选择AElog故障数据作为测试样本,构建得到空间向量模型(VSM),数据处理通过主分量启发式算法完成。通过遗传算法来实现对神经网络初始权值及阈值的优化处理,之后再利用BP算法完成训练与分类。图2给出了具体诊断流程。

图2 车载网控系统故障诊断模型
4 结果分析
选择Matlab/simulink来建立仿真集成环境并对ANN进行训练,以trainlm作为训练函数,得到图3所示的训练误差曲线。经测试发现到达第24步时发生了收敛。在GA-ANN网络结构中使用和ANN网络同样的训练样本,但ANN网络权值及其阈值在初始化过程中是通过系统进行随机分配得到。设置初始种群数目40个,选择参数0.09,交叉算子0.75,变异概率0.01。
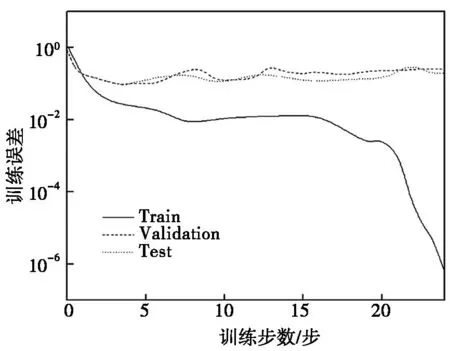
图3 误差曲线
之后对网络性能进行评价,所使用的评价指标包括收敛步数与样本误差。以支持向量机SVM和粒子群算法PSO作为参考对象,根据测试结果获得表1的结果。通过分析表1可知:

表1 实验结果对比
1) 相比较支持向量机SVM和粒子群算法PSO算法,采用遗传算法可以有效优化平均误差及数据正确率,并且有效降低迭代次数。表明可以通过属性约简方法来提升神经网络运算性能,验证了本文方法的准确性。
2) 相比较单独的BP网络,经过遗传算法优化处理BP在训练过程中可以获得比初始BP更快时收敛速率。相比较单独的ANN网络,经过遗传算法优化处理ANN在训练过程中可以获得比初始ANN更快时收敛速率。
5 结论
本文设计了一种基于GA改进ANN算法的车载网控系统故障诊断方法,研究得到如下有意结果:
1) 在分析车载网控系统组成结构的基础上,利用GA来实现对ANN初始权阈值的优化过程,促进网络学习过程更快完成收敛过程,并给出了GA优化ANN具体流程。
2) 采用遗传算法可以有效优化平均误差及数据正确率,并且有效降低迭代次数,表明可以通过遗传算法方法来提升神经网络运算性能。经过遗传算法优化处理的ANN在训练过程中可以获得比初始ANN更快时收敛速率。