多模GNSS PPP时间传递性能比对分析
2024-03-05李佳豪贾小林杜彦君张智超严祥高卢文韬
李佳豪,贾小林,杜彦君,张智超,严祥高,卢文韬
(1.长安大学地质工程与测绘学院,西安 710061;2.西安测绘研究所,西安 710054;3.西安科技大学测绘科学与技术学院,西安 710054)
0 引言
随着全球卫星导航系统(global navigation sate-llite system,GNSS)技术的发展以及各行业科技的进步,精密时间频率已经成为一个国家科技、经济、军事和社会生活中至关重要的战略资源。信息化高度发展的今天,时间同步得到了更加广泛的应用[1]。目前,采用卫星技术开展的时间比对方法主要有共视法、全视法和精密单点定位(precise point positioning,PPP)技术,其中PPP时间传递方法是利用PPP技术获取接收机与参考时间基准之差,进而获得两地钟差之差的一种全天候、全天时且不受距离限制的高精度时间比对方法[2-4]。PPP时间传递精度优于共视和全视时间比对方法,是国际时间比对的重要手段之一,为协调世界时(coordinated universal time,UTC)的计算做出巨大贡献[5-7]。近年来,随着我国北斗三号卫星系统(BDS-3)的不断建设、欧盟 Galileo 的发展、美国GPS的现代化不断深入和GLONASS的技术创新,多频多模GNSS的发展使得卫星导航用户的可用资源更加丰富,也为精密时间传递带来了新的机遇与挑战[8]。
目前已有不少学者对GNSS多模融合PPP时间传递进行了比较分析,于合理等[9]进行了BDS2/BDS3载波相位融合时间传递精度分析,结果表明,融合解算可将2条链路的时间传递精度分别从0.11 ns,0.10 ns提高到0.07 ns,0.08 ns;Zhang等[10]分析了基于GPS/BDS/Galileo组合系统的载波相位时间频率传递模型,对于7 537.5 km的长时间链路,组合多系统解的均方根(root mean squar-es,RMS)值比仅GPS、仅BDS和仅Galileo分别提高了18.8 %,59.4 %和35.0 %,对于4.7 m的短时间链路,GNSS组合后的改善量分别比GPS、BDS和Galileo高6.7 %,52.6 %和38.2 %;覃进[11]分析了BDS/GPS/GLONASS 组合载波相位精密时间传递模型,结果表明,多系统组合即使在高度角较大的情形下也具有更好的可用性和时间传递精度;Ge等[12]分析了单频接收机的GNSS组合PPP时间传递精度,多系统组合具有更高的时间传递精度和可见卫星数;张继海等[13]进行了GNSS多系统PPP融合时间方法比对,实验结果表明,GNSS 多系统 PPP 融合技术解算两地钟差的稳定度方面要优于单系统,对基于BDS、Galileo、GLONASS的单系统 PPP 比对有较明显的提高,且提高在 5%以上。
总体而言,GNSS PPP时间传递技术已经得到了广泛应用并取得了一定成果。但目前针对时间传递的研究多为单系统,尚未有全面综合分析单系统至四系统组合的时间传递精度。基于此,本文采用多模GNSS实验工程(multi-GNSS experience,MGEX)跟踪站数据进行实验,综合全面地分析了8种多系统组合模式在时间频率传递中的精度及稳定性,以期为后续多系统组合PPP时间传递方法应用提供一定参考。
1 多系统组合PPP时间传递函数模型
1.1 PPP时间传递函数模型
PPP时间传递函数模型与大地测量学中的PPP函数模型相同,根据电离层的处理方法通常采用消除一阶电离层的无电离层组合(ionosphere free,IF)模型,可以表示为[14]
(1)
(2)
(3)
式中,f1、f2表示一、二频点的频率;P和L分别表示伪距和载波观测值。将式(2)、式(3)线性化后的待估参数可表示为
(4)

而时间比对则是计算A、B两地接收机钟差之差,根据上式可以得到
ΔtA,B=dtr,A-dtr,B=(TA-IGST)-(TB-IGST)
(5)
式中,TA和TB分别为A、B两地的参考时间频率信号。
1.2 多系统PPP时间传递函数模型
各单系统PPP时间传递模型之间类似,且主要参数为dtr,针对不同系统可以得到GPS、GLONASS、BDS、Galileo的接收机钟差为
(6)

(7)
鉴于篇幅有限,直接给出GNSS四系统组合PPP时间频率传递函数模型,其可以表示为
(8)
式中符号与式(1)相同,将式(8)线性化后的待估计参数为[16]
(9)
双系统、三系统组合的PPP时间频率传递函数模型与四系统组合模型类似,根据组合方式参考式(8)、式(9)即可推导获得。
2 实验与分析
2.1 数据来源及处理方案
为探究GNSS多系统组合PPP 时间传递精度,采用PTBB、BRUX和NIST 3个MGEX测站2023年6月6日~2023年6月12日(年积日157~163)连续7天的观测数据进行实验分析,所有测站均可接收到GPS(L1/L2)、BDS(B1I/B3I)、GLONASS(G1/G2)、Galileo(E1/E5a)数据,且测站均属于国际守时实验室,接收机外接高精度原子钟。观测数据采样间隔为30 s,截止高度角为7°,实验采用静态模式进行数据处理;卫星轨道和钟差产品采用德国地学研究中心(Deutsches GeoForschungsZentrum,GFZ)最终精密产品,测站坐标真值取自SNX周解文件,天线相位中心变化和偏移使用igs20.atx文件修正,电离层延迟采用双频无电离层组合消除,对流层干延迟分量采用模型改正,湿延迟分量估计为随机游走过程,过程噪声设置为10-8m2/s,系统间偏差采用随机游走模型,过程噪声设置为10-6m2/s[15]。本文以PTBB测站为中心节点形成2条时间比对链路,测站分布图如图1所示,测站及链路信息如表1所示。

表1 测站详细信息
本文首先统计了各组合系统3个MGEX测站连续7天的平均卫星可见星数和钟差精度因子(time dilution of precision,TDOP),其次按照8种多系统组合模式对2条时间链路进行精度分析,以链路的标准偏差(standard deviation,STD)为评判准则,最后分析了8种多系统组合模式的频率稳定性。处理策略:以单GPS系统为对比,采用GPS/GLONASS(GR)、GPS/Galileo(GE)、GPS/BDS(GC)、GPS/GLONASS/Galileo(GRE)、GPS/GLONASS/BDS(GRC)、GPS/Galileo/BDS(GEC)以及GPS/GLONASS/Galileo/BDS(GREC)等8种多系统组合模式进行时间比对实验。
2.2 平均可见星数及TDOP值
针对多系统组合的优势,首先分析了GPS,GR,GE,GC,GRE,GRC,GEC以及GREC 的平均卫星可见星数和TDOP值,其中,TDOP是反映GNSS观测卫星数据和空间分布对接收机钟差参数影响的重要指标,TDOP值越小则表明接收机钟差估计精度越高。图2和图3所示分别为2023年6月6日(DOY:157)BRUX测站的可见星数和TDOP值。从图中可知,多系统组合相较于单GPS系统在卫星可见星数和TDOP值上有显著优势。为了进一步量化,表2为所选测站7天的平均可见星数和TDOP值。结合图表可知,8种处理策略的所有测站7天平均卫星可见星数分别为10.3,18.3,17.7,19.6,25.1,27.3,26.5和34.1,双系统中GC平均可见星数最多为19.6颗,三系统中GRC最多为27.3颗,四系统组合较单GPS系统可见星数提升了2倍为34.1颗;TDOP值方面,8种处理策略的所有测站7天平均TDOP分别为0.885,0.634,0.657,0.603,0.532,0.506,0.511和0.447,相对于单GPS系统,多系统组合的TDOP序列更加稳健平缓,且GR、GE、GC、GRE、GRC、GEC和GREC的平均TDOP值分别提升了28.1%,25.5%,31.6%,39.7%,42.6%,42.1%和49.3%,其中双系统中提升最大的为GC,三系统为GRC。
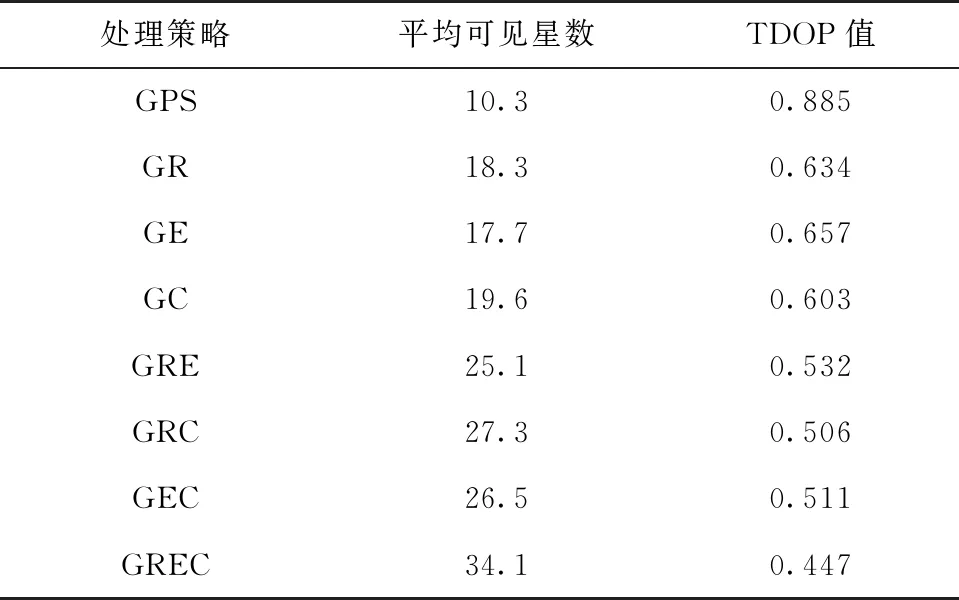
表2 所选测站7天的平均可见星数和TDOP值
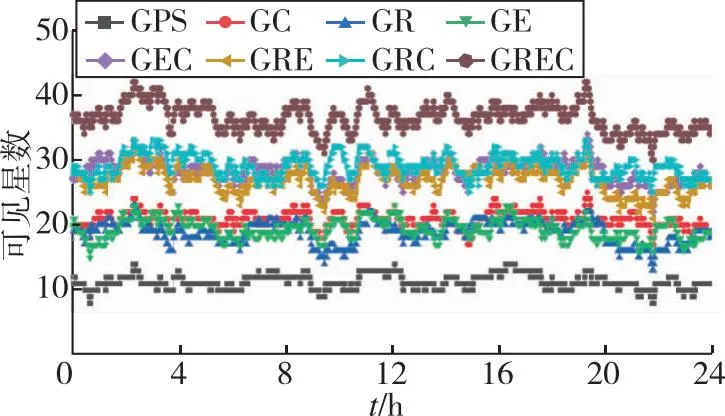
图2 157日BRUX测站的可见星数

图3 157日BRUX测站的TDOP值
2.3 时间传递链路精度分析
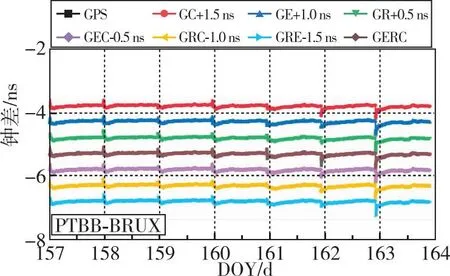
为综合全面分析GNSS多系统组合PPP时间传递精度,利用上述8种策略分析了PTBB-BRUX和PTBB-NIST这2条链路连续7天的时间传递精度,图4(a)和(b)分别为2023年6月6日~2023年6月12日(年积日157~163)连续7天 PTBB-BRUX和PTBB-NIST的链路时间传递序列图。
(a)
为进一步量化PTBB-BRUX和PTBB-NIST这2条链路的时间传递精度,统计了2条链路连续7天的STD值,如表3所示。结合图表可知,单系统和多系统组合时间传递序列趋势基本一致,证明了7种组合系统的可行性。从表3中可知,多系统组合时间传递链路精度较单系统均有提升,对于PTBB-BRUX链路,较单GPS系统而言,双系统组合中GC提升最多为10.39%,三系统中GRC提升最多为11.86%,而四系统组合整体提升最高为11.98%;PTBB-NIST链路方面,较单GPS系统而言,双系统组合中GC提升最多为4.89%,三系统中GRC提升最多为5.49%,而四系统组合整体提升最高为5.79%。
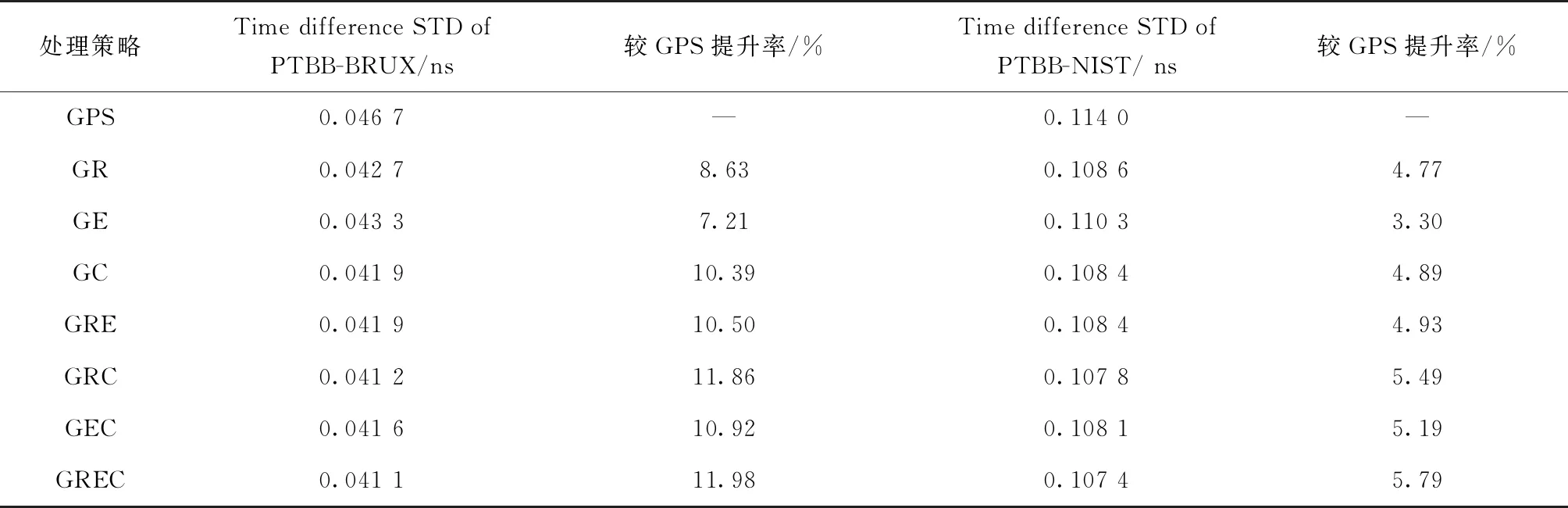
表3 2条链路连续7天的时间链路差值STD统计值
结合图表可知,较单GPS系统而言,双系统组合中GC组合提升最高,其次为GR,最后为GE;三系统组合中GRC组合提升最高,其次为GEC,最后为GRE;四系统组合整体提升最高,符合四系统组合精度优于三系统,三系统优于双系统,双系统优于单系统。
2.4 时间传递链路频率稳定度分析
在时间传递过程中,频率稳定性也是时间对比的重要指标,因此利用Allan方差来获取时间传递中钟差的稳定性[17-18],如图5(a)和(b)所示。

(a)
图5(a)和(b)分别为PTBB-BRUX和PTBB-NIST链路的Allan方差图,为进一步分析多系统组合较单系统的时间传递稳定度,表4和表5分别为PTBB-BRUX和PTBB-NIST链路的时间比对钟差频率稳定度统计值。结合图表可知,多系统组合的时间传递频率稳定度在不同阶段均优于单GPS系统,尤其是在10 000 s以内。
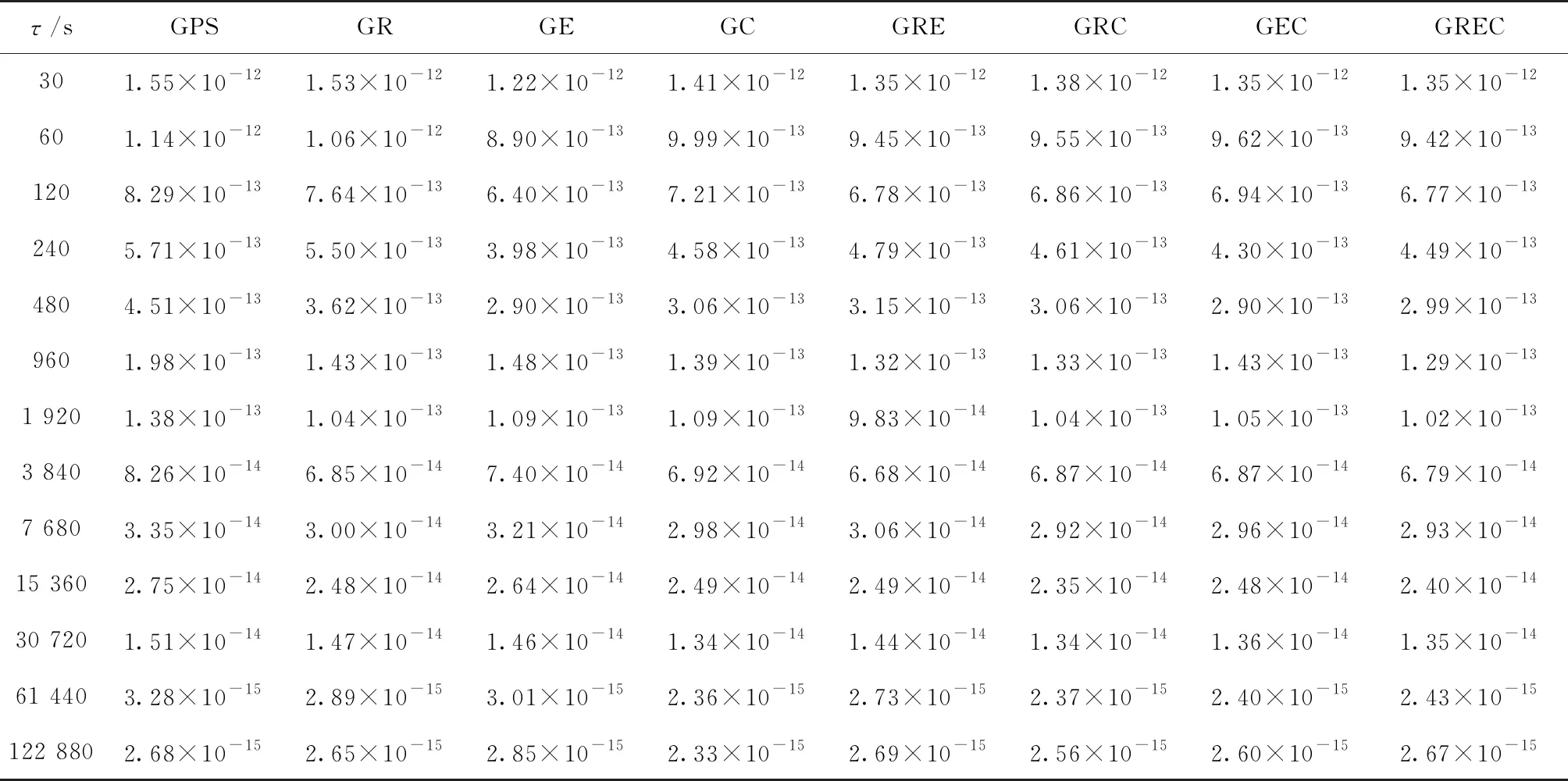
表4 PTBB-BRUX链路频率稳定度
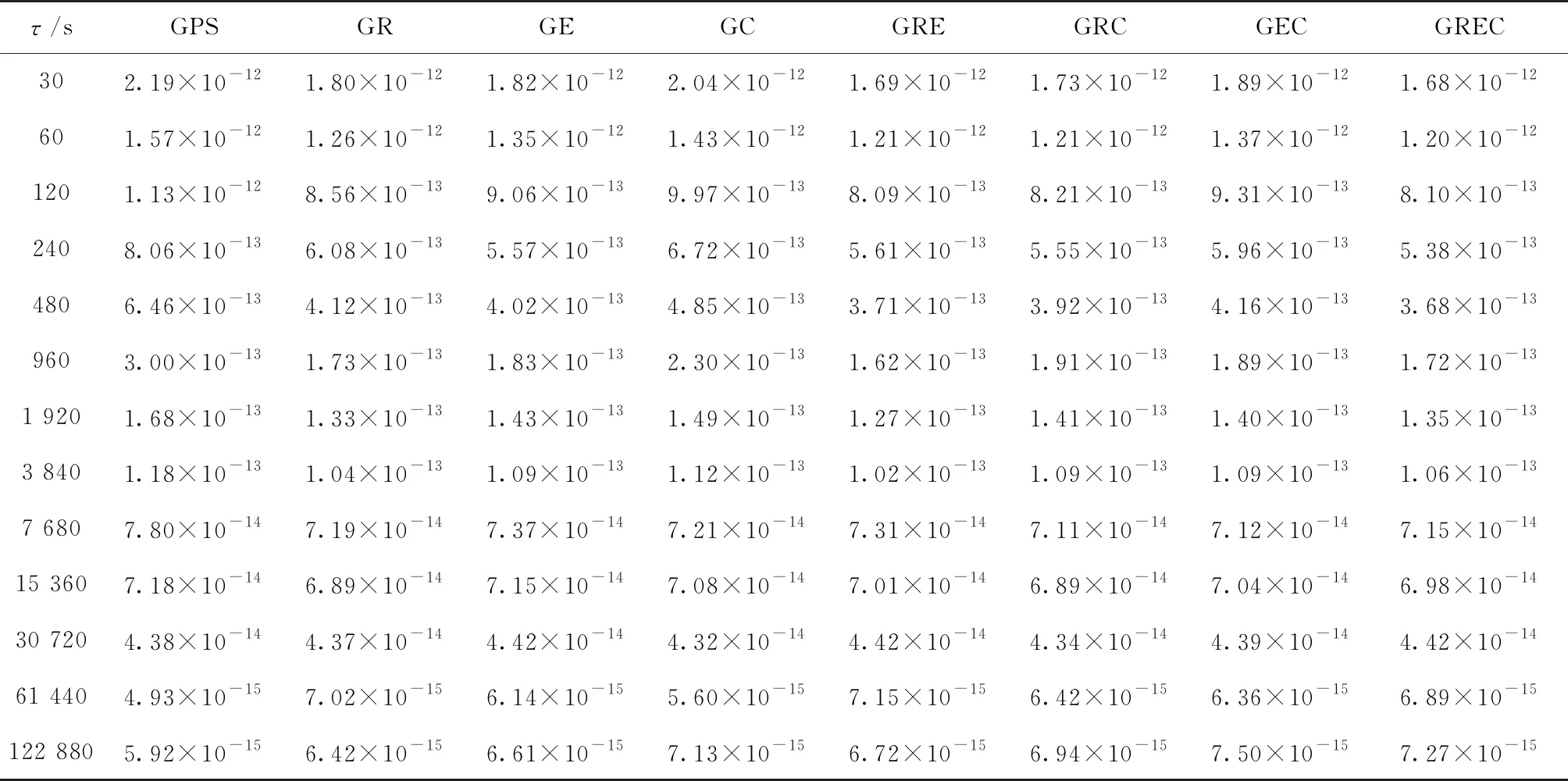
表5 PTBB-NIST链路频率稳定度
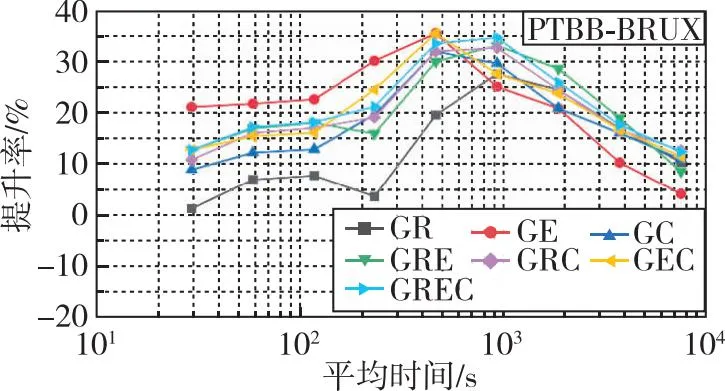
考虑到时间间隔大于10 000 s的情况下,时间传递链路频率稳定度计算的误差较大,图6(a)和(b)分别为PTBB-BRUX、PTBB-NIST链路多系统相较于单GPS系统频率稳定度的提升百分比。结合图表可知,在PTBB-BRUX时间传递链路中,相较于单GPS系统,双系统组合整体提升率在1.3%~32.2%,平均提升17.6%,三系统组合整体提升率在8.7%~35.7%,平均提升20.5%,四系统组合提升率在12.5%~34.8%,平均提升21.6%;PTBB-NIST链路方面,双系统组合整体提升率在5.5%~42.3%,平均提升18.8%,三系统组合整体提升率在6.3%~36.1%,平均提升23.1%,四系统组合提升率在8.3%~42.9%,平均提升25.8%。
(a)
3 结论
为综合分析多系统组合时间频率传递性能,选取2023年6月6日~6月12日连续7天的3个MGEX测站进行实验,采用GFZ最终精密星历和精密钟差等产品,开展了8种多系统组合时间频率传递研究,对比了各组合系统较单GPS 系统在各方面的改善情况,得到了如下结论。
1)多系统组合较单GPS系统在各方面均有提升。平均可见星数方面,双系统GC组合最多为19.6颗,三系统GRC组合最多为27.3颗,四系统组合为34.1颗;TDOP值方面,双系统GC组合最小为0.603,三系统GRC组合为0.506,四系统组合为0.447。
2)多系统组合时间传递精度较单GPS系统均有提升,四系统组合精度最高,三系统次之,其次为双系统,单系统最差。PTBB-BRUX和PTBB-NIST 2条链路中,双系统组合中GC组合精度提升最高可从单GPS系统的0.046 7 ns,0.114 0 ns提升至0.041 9 ns,0.108 4 ns,三系统组合中GRC组合提升最高至0.041 2 ns,0.107 8 ns,四系统组合整体提升最高至0.041 1 ns,0.107 4 ns。
3)实验结果表明:多系统组合的频率稳定度较单GPS系统均有提升。PTBB-BRUX链路中双系统的万秒稳为3.21×10-14~2.48×10-14,三系统为3.06×10-14~2.35×10-14,四系统为2.93×10-14~2.40×10-14;PTBB-NIST链路中双系统的万秒稳为7.37×10-14~6.89×10-14,三系统为7.31×10-14~6.89×10-14,四系统为7.15×10-14~6.89×10-14。在10 000 s内,双系统组合的平均提升率为17.6%,三系统组合的平均提升率为20.5%,四系统组合的平均提升率为21.6%。
综上所述,针对载波相位时间频率传递中多系统组合模式较单系统提升较高,在实际情况中可根据实验观测数据进行相应的组合。其中双系统GPS/BDS组合精度较高,可以优先使用,四系统较三系统组合提升较少,并考虑到接收机性能和接收数据可以优先使用三系统组合模式。随着GNSS系统的飞速发展,可将多系统组合推广至实时性的时间性能传递,以及和高精度卫星双向传递、光纤时间传递技术进行综合使用。
