锁销式制动器解锁的离散性分析
2024-03-04王其锋曾晓松
王其锋,曾晓松,刘 勇
(贵州航天林泉电机有限公司,贵州 贵阳 550081)
0 引言
随着电力电子技术和半导体材料科学的发展,电动舵机在空空导弹、地空导弹等武器装备上得到了广泛应用,通过锁定电机轴即可锁定舵机的舵面,电磁制动器相较于传统的气动型、机械型舵面锁制方式,具有体积小、重量轻、可靠性好、控制精度高等特点[1-2],因此,电机制动器组合装备已成为舵机系统的核心部件。摩擦式电磁制动器在挂飞振动测试中,由于摩擦片的蠕动效应,锁制力矩会变小,失去锁制功能[3]。廖庆文等分析了锁销式制动器各零部件结构尺寸、材料属性对锁制性能的影响,对制动器产品设计有较强的参考价值[4]。李屹等对制动器进行了FMEA分析,计算了电磁力和制动时间的确信可靠度,为提高工程实践中制动器可靠性水平提供了参考[5]。陈开楼等为了提高电磁力的计算精度,基于电磁制动器3D模型,量化分析了气隙大小、温度、材料等对响应速度的影响,为快响应、高制动力矩密度制动器设计提供了参考[6]。张博等对制动器稳态温度场进行了分析,评估了温度对解锁电磁力的影响[7]。周金华等提出了动铁心与静铁心的接触面采用凹凸错位结构设计,以减少实际工作气隙,提高电磁力矩和响应速度,但并未经过实践验证[8]。何仁等提出了一种根据温升情况自动调整气隙宽度,进而保证电磁制动力稳定性的新型电磁制动器结构[9]。综上,现有文献的研究主要集中在电磁制动器的结构、多物理场仿真等方面,大多数文献仅考虑了气隙、温度对制动器性能的影响,但对制动器实际使用工况(如振动、加速度等力学环境)的研究较少,本文对某电机制动器组合加速度环境下解锁的离散型问题进行了分析,并提出了解决办法,具有一定的工程参考价值。
1 应用背景
1.1 工作原理
锁销式制动器为失电制动器,主要由磁轭、衔铁、制动盘、盖板、导柱、弹簧、推柱等组成,如图1-图3所示。在不通电的情况下,衔铁在弹簧的弹力作用下紧靠盖板,制动盘位于衔铁两限位凸台之间,实现锁制功能。线圈通电后磁轭被磁化吸合衔铁,衔铁在电磁力作用下克服弹簧弹力向磁轭端运动,衔铁上凸台和制动盘脱开,限位失效,实现解锁功能。

图1 电机制动器组合结构示意图
图1中:δ为电磁气隙,取值范围0.7~0.8 mm;L1为制动器有效长度,20.5 mm。
图2中:h1、h2分别为推柱厚度、长度尺寸。
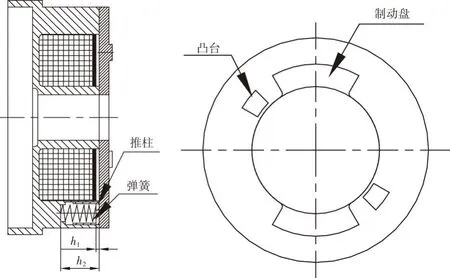
图2 弹簧、推柱结构
1.2 环境试验
初始状态制动器不解锁,待达到表1中的加速度量级并稳定后,给制动器施加励磁电压21.5VDC,同时给20A1C001#电机本体上电,未能正常转动,报故停转。加速度试验-X方向定义如图1所示,Z方向垂直纸面向外。

表1 解锁可靠性试验条件
2 离散性机理分析
制动器解锁的关键在于实现衔铁和制动盘分离。从图1可以看出,在-X方向15 g的加速度环境下,电机制动器组合整体有向-X方向移动的趋势,由于衔铁和推柱处于“自由”(沿±X方向可移动)状态,相对于电机制动器组合,有沿+X方向运动的趋势,衔铁和推柱在运动时,衔铁与导柱、推柱与磁轭摩擦,会产生摩擦力。根据以上分析,加速度环境下衔铁受力如图4所示。

图4 衔铁受力示意图
1)衔铁和推柱受到的沿+X轴方向的离心力,记为F1;
2)弹簧在初始状态下处于压缩状态,衔铁和推柱受到的弹簧弹力,记为F2;
3)衔铁在定位套筒上移动时,衔铁、推柱受到的摩擦力,记为F3;
4)励磁绕组在电压激励下,产生的电磁力,记为F电磁力。
加速度环境下解锁的必要条件为:电磁力大于离心力、摩擦力和弹簧弹力的合力。现分别计算电磁力、离心力、摩擦力和弹簧弹力。
2.1 瞬态电磁场仿真
基于Ansoft Maxwell平台对制动器进行瞬态场分析,电磁模型如图5所示,为提升计算效率,取1/2模型,设置Symmetry对称边界条件。

图5 制动器电磁模型
制动器在尺寸一定的情况下,影响电磁力大小的参数有绕组的电阻值以及装配形成的电磁气隙大小δ。现分析制动器绕组电阻为95 Ω、δ在0.7~0.8 mm变化时的初始电磁力大小,如图6所示;电磁气隙大小为0.7 mm时,电阻在88~95 Ω变化时的初始电磁力大小,如图7所示。
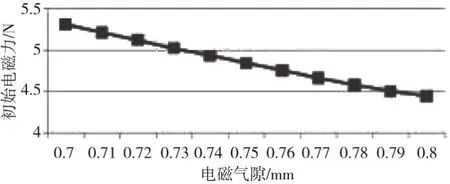
图6 初始电磁力-气隙变化曲线
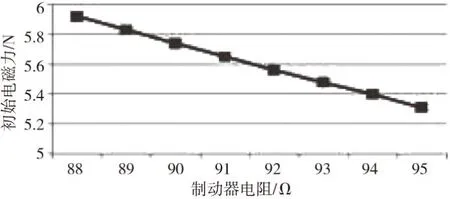
图7 初始电磁力-电阻变化曲线
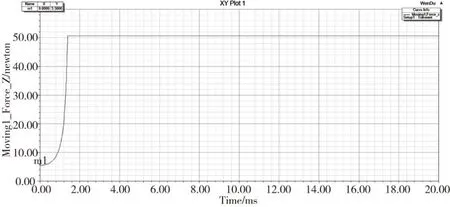
从图6、图7可以看出:当气隙长度取0.7 mm、制动器电阻值为88 Ω时,初始电磁力最大;当气隙长度取0.8 mm、制动器电阻值为95 Ω时,初始电磁力最小。经仿真计算,初始电磁力范围为4.34~5.92 N。如图8、图9所示。
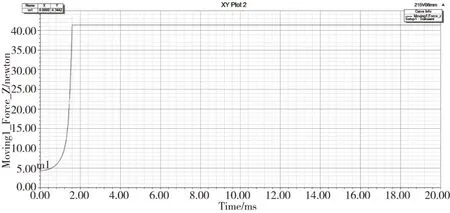
图8 最小初始电磁力
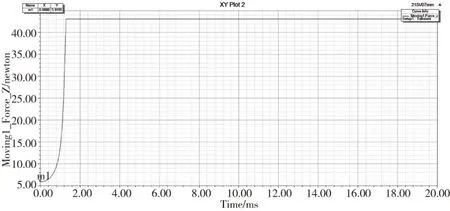
图9 最大初始电磁力
2.2 反作用力校核
1)离心力
根据衔铁、推柱的设计尺寸,计算得到衔铁、单个推柱质量分别为8.6 g、0.14 g,考虑到电机制动器组合在系统中的安装位置,衔铁和推柱按自由落体状态承受重力加速度g,同时在15 g的加速度环境下,衔铁、推柱所受离心力的大小为:
F1=ma=(0.0086+0.00014×6)×(15+1)×9.8=1.48(N)
注:一个制动器含6个推柱,推柱数量和弹簧数量为1∶1。
2)弹簧弹力
弹簧设计参数如图10所示,经计算,弹簧的弹性系数取值范围为0.09~0.1 N/mm。

图10 弹簧弹力分布
弹簧在安装时处于压缩状态,压缩量:
λ=x-(h2-h1)-δ=11-(6-0.5)-(0.7~0.8)=(4.7~4.8)mm
因此,6个弹簧合力的取值范围:
2.54(N)=0.09×4.7×6≤F2=kλ≤0.1×4.8×6=2.88(N)
3)摩擦力
衔铁在重力作用下与定位套筒之间产生的摩擦力:
F31=μmg=0.15×0.0086×9.8=0.013(N)
推柱在重力作用下与磁轭之间产生的摩擦力为:
F32=μmg=6×0.15×0.00014×9.8=0.001(N)
式中:μ为材料干摩擦系数(钢-钢),取0.15[4]。
因此,摩擦力合力为:
F3=F31+F32=0.013+0.001=0.014(N)
4)反作用合力
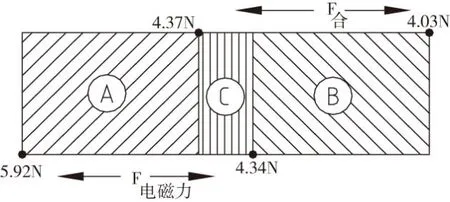
离心力F1、弹簧弹力F2、摩擦力F3的合力取值范围为4.03~4.37 N。
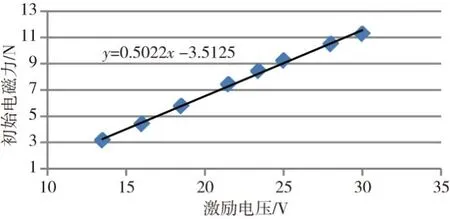
4.03(N)=1.48+2.54+0.014 根据以上计算结果,绘制电磁力、反作用合力分布示意图,如图11所示。由图可知:当电磁力、反作用合力分别位于区域A、区域B时,制动器能可靠解锁;当电磁力、反作用合力均落至区域C时,不一定能解锁,因此解锁呈现出一定的离散性和随机性。 图11 电磁力、反作用合力分布示意图 随机抽取4台电机制动器组合(技术状态相同)按表1、图1要求进行加速度试验,试验结果见表2。 表2 电机制动器组合解锁试验验证结果 可以看出:21.5 V下并非所有电机制动器组合均能解锁,解锁呈现一定的离散性,验证了第2章节理论分析的正确性,对这一试验结果进一步分析: 1)反作用力均是严格按照理论公式进行计算且不存在不确定的变量,因此,反作用力的合力计算结果准确; 2)4台电机有3台未能解锁,一定程度上说明电磁力计算值偏大,导致未能解锁的电机制动器组合数量偏多。其原因在于有限元是以离散网格无限逼近实体特征,电磁场仿真会存在偏差[10-11],电磁力仿真值偏大。 此外,由于表2的试验样本数不够充分,不能确定制动器解锁的电压上限,可参考常态下电机制动器组合解锁电压的浮动范围。某批次(技术状态相同)常态下71台电机制动器组合的解锁电压为14.02~17.87 V,电压浮动范围为3.85 V,对表2数据作加严处理,将表2中20.5 V作为解锁电压最小值,解锁电压上限值为20.5+3.85=24.35 V,该电压下的最小初始电磁力为5.29 N(注:气隙0.8 mm、电阻95 Ω),如图12所示。 图12 解锁最小初始电磁力 因此,为确保电机制动器组合可靠解锁,改制后的最小初始电磁力应不小于5.29 N。 由第2章节、第3章节分析可知,电机制动器组合不能可靠解锁的原因在于电磁力余量不够,不能克服加速度环境下带来的负载增量。因此,要提高电磁力,应提高安匝数,但由于系统电源容量有限,对电流阈值有要求,因此,应同时调整匝数和线径。 根据以上思路,增加电机匝数和线径能提高电磁力,但会增大制动器体积。原电机制动器组合装配图如图1所示,前端盖与机壳为两体结构,通过螺钉联接,前端盖较厚,轴向空间未完全利用。鉴于此,可以将前端盖与机壳做成一体结构,电机本体部分前移,并保证电枢端部离机壳的爬电距离不小于1 mm,确保电机制动器组合的介电强度,电机本体部分电磁参数尺寸不做调整。结构方案更改如图13所示。 图13 机壳、端盖一体化电机制动器组合结构简图 图13中:L2为制动器有效长度,在总长一定的情况下,最大值为24.5 mm。 根据以上设计思路,增加电机匝数和线径提高电磁力,并控制母线电流不大于0.41 A,方案对比见表3。 表3 电磁方案对比 受电机制动器组合体积限制,制动器轴向长度最大增加4 mm(即L2-L1),择优选取方案3,即线径为0.16 mm、制动器绕组轴向长度为10.5 mm、匝数为1933的方案。 考虑到制动器线圈绕制时每一圈线圈大小存在差异,电阻值会在一定范围内波动,控制制动器绕组的电阻在88~93 Ω范围内。 按下式计算制动器在高温环境下的电阻,经计算,高温环境下制动器绕组的电阻值为111.2 Ω。 式中:t1—绕组温度,20 ℃;T—电阻温度常数,铜线取值235;t2—换算温度,70 ℃;R1—测量电阻值;R2—换算电阻值。 电磁气隙按0.8 mm、电阻按111.2 Ω进行仿真分析,电磁力计算结果如图14所示。 图14 改制后制动器最小初始电磁力 从图14可以看出,考虑了制动器电阻、气隙的离散型以及高温环境对制动器电阻的影响后,最小初始电磁力为5.50 N,由第3章节分析可知:改制后的最小初始电磁力应不小于5.29 N,因此,改制后的电机制动器组合在加速度环境下能可靠解锁。 为确保21.5 V电压下电机制动器组合在-X方向15 g的加速度环境下能可靠解锁,常态环境下增加强制检验点。 21.5 V下电机制动器组合能可靠解锁,该激励电压下的电磁力减去加速度反作用力,可以得到在加速度为0时的解锁电磁力,找到该电磁力下的激励电压,该激励电压下电机制动器组合在加速度为0时能可靠解锁,15 g加速度环境下电机制动器组合就能解锁。 在气隙大小取0.8 mm、电阻一定取93 Ω的情况下,只改变激励电压,得到不同激励电压下的初始电磁力,初始电磁力随激励电压的变化曲线如图15所示。 图15 初始电磁力随激励电压变化曲线 由图15可知,曲线的斜率为0.5,单位激励电压作用下,初始电磁力增加0.50 N。 当-X方向没有加速度作用时,衔铁和推柱不会受到沿-X轴向外的离心力作用,即F1由1.48减小到0,因此,可以将21.5-1.48/0.5=18.5 V电压常态下能否解锁作为加速度环境下可靠解锁的强制检验点。 本文对加速度环境下制动器的解锁机理进行了分析,并对解锁呈现离散性的现象进行了定位。通过结构调整、电磁参数优化提高电磁力,以平衡加速度工况下增加的额外负载;并设置常态下的强制检验点来确保电机制动器组合在加速度环境下也能可靠解锁。2.3 解锁离散型分析
3 试验验证


4 电机制动器组合改制
4.1 结构优化

4.2 电磁方案优化

4.3 解锁可靠性分析
4.4 强制检验点
5 结论
