基于机器学习模型理论的基坑变形预测研究
2024-03-04田久晖程华强邓钦震
田久晖 程华强 苏 鑫 邓钦震 杨 宏
(1.武汉市市政建设集团有限公司,湖北 武汉 430070;2.武汉市桥梁工程有限公司,湖北 武汉 430070)
随着城市建设的不断发展,工程建设已不再局限于地面,城市地下空间开发日益增多,因此基坑工程也随之增加[1-2]。与此同时,基坑工程变得越来越复杂,因此对基坑进行监测变得尤为重要,基坑监测技术也逐渐从人工监测向自动化监测领域发展[3]。
与人工监测相比,自动化监测通过将不同的传感器和监测设备相连,能即时获取各监测仪器的数据,全天候动态监测基坑。这个方式不仅可以节省人力成本,还能更高效、准确地对监测点位进行实时监测。随着计算机技术的发展,机器学习不仅能处理多样性数据,还具备高速性和优越的预测能力,因此广泛运用于岩土工程领域。
常规的机器学习算法很少考虑特征值对结果的相关性。因此,本文基于现场自动化监测实测数据,引入互信息,采用机器学习算法MI-BP 对基坑变形进行预测,可以很好地选取和结果相关的特征,提升模型计算的速度。
1 基坑变形监测及建立机器学习模型
1.1 基坑变形自动化监测
基坑自动化监测技术是在大数据、物联网技术的基础上,结合多种传感器,以监测集成设备为枢纽,向监测云平台传输数据,监测云平台可根据收集的数据进行实时分析,并结合输入的设计控制值进行实时预警,解决了很多人工难以解决的问题[4-5]。
自动化监测系统通常包括但不限于以下组成部分。
传感器技术:利用各种传感器(例如位移传感器、倾斜传感器和应变传感器等)实时测量基坑周围土体和结构的变形情况。数据采集系统:采集传感器生成的数据,并将其传输到数据中心或监测站点进行处理和存储。数据传输技术:利用网络技术实时传输监测数据,包括线和无线传输方式。数据处理与分析:对采集的数据进行分析、处理、展示、报警、预测和模拟。实时监控和报警系统:通过自动化监控系统实时监测基坑的变形情况,并根据事先设定的阈值进行报警,保障施工和工程安全。本项目采用固定式测斜仪和全自动测斜机器人对深层水平位移进行自动化监测,并在自动化监测专用设备上集成。
1.2 建立机器学习模型
机器学习的概念首次出现于20世纪50年代。最早的机器学习是研究关于符号推理和专家系统。在60年代和70年代,机器学习算法更多侧重于逻辑推理和规则推导,在这期间,开始出现决策树和专家系统等方法,反向传播算法促进了神经网络的发展。SVM 是在90年代初期引入的一种重要机器学习算法,解决分类问题时效果显著。此外,该方法进一步推动了机器学习的发展,处理非线性问题更有效。随着计算能力大幅提升,机器学习进入了大数据时代。大规模数据集的可用性推动了深度学习的兴起。2010年以来,深度学习的快速发展得益于大数据、强大的计算资源和新的深度学习框架。强化学习是一种机器学习方法,能让智能体通过与环境互动来学习最优策略。其在自动驾驶、游戏领域等方面表现出色,从而引起众多研究人员的关注。自动化机器学习工具的发展使机器学习更容易,迁移学习也成为研究热点,允许模型从一个领域迁移到另一个领域,提高了模型的泛化性能。
机器学习算法的历史是一个不断演化和发展的过程,受计算能力、数据可用性以及新兴技术的推动。这个方法已经成为人工智能领域的核心组成部分,对人们的日常生活和各行业都有深远影响。
本文将采用机器学习算法MI-BP。其中,BP 为BP 神经网络,互信息(Mutual Information)是信息论中的概念,用于度量随机变量间的相关性。在机器学习特征选择中,互信息通常用于关联评估特征和目标变量,确定对预测目标变量是最有效的特征。
当互信息值较大时,表示特征间存在较强的相关性;当互信息值接近0 时,说明特征间没有明显的相关性。因此,可用互信息值评估每个特征与目标变量间的相关性,并选择具有较高互信息值的特征作为预测目标的重要特征。
通过均方根误差(RMSE)、决定系数(R2)和均方误差(MSE)评价机器学习方法的有效性[6-8]。如公式(1)~(3)所示。
式中:RMSE为均方根误差;R2为决定系数;MSE为均方误差;n为数据数量;i为数据序号;yi为实测值;yi*为预测值;为实测值的平均值。
2 工程应用
2.1 工程概况
本工程为拟建武泰闸污水处理厂及1#调蓄池基坑工程,基坑位于白沙洲大道与南湖路交叉口西北角。基坑支护结构采用钻孔灌注桩加内支撑(砼支撑)的形式。
本工程周边环境复杂,基坑东侧距现状南湖路约14.3~19.9m,东侧民房及商铺与基坑最小净距约为15m;南侧距离京广铁路走廊净距为29.3m;西侧距巡司河岸为13.3m,距巡司河管理用房5.1m;基坑北侧距现状白沙洲大道为11.6~20.9m,如图1所示。
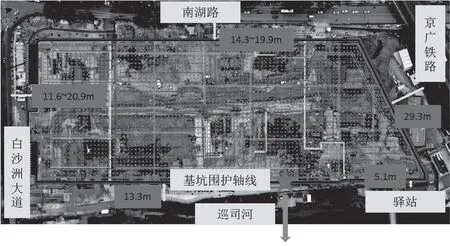
图1 现场实际图
研究场地土主要包括杂填土、粉质黏土1、粉质黏土2、粉质黏土3 和灰岩,土的物理力学指标见表1。

表1 土的物理力学指标
2.2 测点布置
在实际工程中,为了解基坑开挖过程中围护结构侧向变形规律,以围护结构附近测斜点土体深层水平位移来间接反映围护结构的侧向变形,虽然在数值上可能与实际围护结构的变形略有不同,但是整体规律较为吻合,有利于保护测点和量测数据。为分析基坑变形,本文对测斜点进行分析。
2.3 结果分析
图2 为测点的水平位移图,按照时间顺序选取了开挖过程中的12 个时间步。

图2 水平位移
从图2 可以看出,测点的水位位移随着开挖的进行,呈现增加的趋势且水位位移总体较小,基坑未发现明显变形。这个测斜数据总量为300 个,将其中80%作为训练数据,20%作为预测数据。数据的输入参数依次为测点深度1、测点时间步2、测点位置处重度3、测点位置处压缩模量4、测点位置处黏聚力5 和测点位置处内摩擦角6,数据的输出参数为测点水平位移。
计算得出特征5 互信息值最小,说明特征5 测点位置的黏聚力在数据集中对结果的影响最小,为使模型计算更高效,在模型训练中将被剔除。通过机器学习后,对比训练集和测试集数据结果如图3~图6所示,指标评价结果见表2。

表2 训练和测试数据评价

图3 训练集效果图
图4 为训练集效果图,其中:斜直线为最小二乘拟合线,是通过MATLAB 最小二乘拟合线绘制函数lsline 绘制的,散点为训练集中真实值对应的预测值。
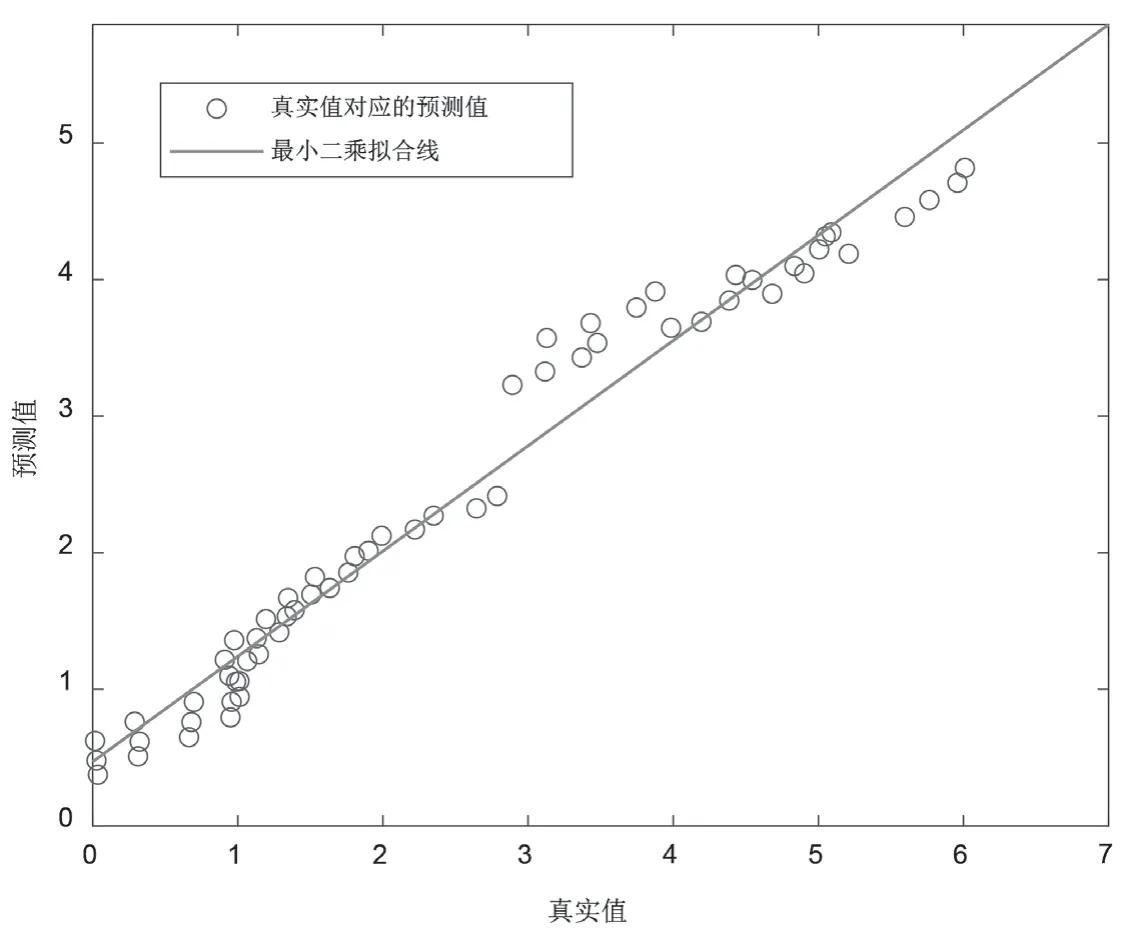
图4 测试集效果图
图4 为测试集效果图,其中:斜直线为最小二乘拟合线,是通过MATLAB 最小二乘拟合线绘制函数lsline 绘制的,散点为测试集中真实值对应的预测值。
图5 为训练集预测结果对比图。

图5 训练集预测结果对比
图6 为测试集预测结果对比图。

图6 测试集预测结果对比
由图3 和图4 可以看出,训练集数据和测试集数据中的真实值和预测值都比较接近,说明数据的训练效果较好,表2 也可以反映这个现象,MI-BP 训练数据的均方根误差(RMSE)和均方误差(MSE)分别为0.1359 和0.18469,决定系数(R2)为0.98228;MI-BP 测试数据的均方根误差(RMSE)和均方误差(MSE)分别为0.5314 和0.28239,决定系数(R2)为0.91066,虽然效果比训练数据稍差,但是总体较好。
由图5 和图6 可以看出,训练集数据预测值和真实值非常吻合,测试集数据中预测值和真实值的吻合度也较高,仅在峰值位置有一些偏差。综上所述,本文采用MI-BP 方法能对自动化监测的水平位移进行预测。后续可将这个算法导入自动化监测程序中,可以提前预测与不断校准完善水平位移。
3 结论
本文采用机器学习模型MI-BP 预测基坑变形,得出以下结论:1)从互信息值可以看出,特征5 测点位置的黏聚力在数据集中对结果的影响最小,为使模型计算更高效,在模型训练中将被剔除。2)MI-BP 训练数据的均方根误差(RMSE)和均方误差(MSE)分别为0.1359 和0.18469,决定系数(R2)为0.98228;MI-BP 测试数据的均方根误差(RMSE)和均方误差(MSE)分别为0.5314和0.28239,决定系数(R2)为0.91066,训练效果较好。3)本文采用MI-BP 方法能对自动化监测的水平位移进行预测。后续可将这个算法导入自动化监测程序中,可以对水平位移进行提前预测与不断校准。