一种能量双向流动的PMSM控制策略研究
2024-03-04张东青孙成国
熊 博 张东青 孙成国
(黑龙江科技大学电气与控制工程学院,黑龙江 哈尔滨 150022)
随着全球能源的枯竭,国家进一步加强关于节能减排、能源再利用方面的工作,发布了一系列政策和措施。电机作为能源消耗的重要部分,有效利用电机的能量对节能减排有很重大的意义[1]。传统的电机驱动系统,网侧使用的是不可控整流装置,该控制方式虽然稳定可靠,但是会产生大量谐波污染电网且能量只能从电网流向电机,只能实现能量的单向流动,当电机处于制动或发电状态时,能量不能回馈给电网,造成浪费[2]。而双PWM 变换器将网侧的不可控整流装置替换为与机侧控制系统相同的PWM 变换器,如此一来,就可以实现能量从电网流向电机以及由电机流向电网的双向流动,且可以实现直流母线电压的可调节,具有电压波动小、能够减少网侧谐波和功率因数高的优点[3]。本文针对双PWM 变换器的网侧和机侧分别采用了电压定向的矢量控制策略和id=0 的矢量控制策略,并对系统进行了仿真验证。
1 双PWM 变化器数学模型
双PWM 变换器拓扑结构的中前端是三相电网,然后经过PWM 整流器和母线电容,最终连接到PWM 逆变器和永磁同步电机。如图1所示。

图1 双PWM 变换器拓扑结构图
1.1 整流器的数学模型
为了便于PWM 整流器数学模型的建立,通常需要进行如下假设:1)电网电压为三相对称的纯正弦波电压。2)网侧滤波电感为线性电感,不会饱和。3)在某些简化分析中,可以忽略功率器件的开关损耗。
笔者先建立了三相PWM整流器在ABC坐标系下的数学模型,如公式(1)所示。
式中:uDC为母线电压;Lg、Rg分别为网侧滤波电感、电阻;ix=(a,b,c)、ex=(a,b,c)、Sx=(a,b,c)分别为网侧三相电流、电压、开关函数;RDC为母线上的电阻负载;C为母线电容。
将其经过Clarke 变换到αβ坐标系下,再经过Park 变换到dq坐标系下的数学模型,如公式(2)所示。
式中:ed、eq为网侧电压的dq分量;id、iq为网侧电流的dq分量;Sd、Sq为开关函数的dq分量;ω为电压旋转角频率。
1.2 永磁同步电机的数学模型
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)的数学模型与网侧数学模型类似,都是根据基尔霍夫定律在三相静止坐标系下建立的,并利用Clarke-Park 变换转换到两相静止坐标系与两相同步旋转坐标系下。
笔者建立了 ABC 三相静止坐标系下的数学模型。其中,定子电压方程如公式(3)所示。
式中:ψA、ψB、ψC为A、B、C 三相绕组的全磁链;uA、uB、uC为A、B、C 三相绕组的相电压;iA、iB、iC为A、B、C 三相绕组的相电流;RS为定子相电阻;p 为微分算子。
磁链方程,如公式(4)所示。
式中:ψfA、ψfB、ψfC分别为永磁励磁磁场交链A、B、C 三相绕组产生的磁链;Lx=(A,B,C)为三相绕组自感;Lxy=(x≠y,x,y=A,B,C)为三相绕组互感。
将其经过Clarke 变换到αβ坐标系下,再经过Park 变换到dq坐标系下的数学模型(电压方程、磁链方程以及电磁转矩方程),如公式(5)~公式(7)所示。
式中:ud、uq为dq两相旋转坐标系下定子电压分量;id、iq为dq两相旋转坐标系下定子电流分量;ψd、ψq为dq两相旋转坐标系下定子磁链分量;ωr为转子电角速度。
磁链方程如公式(6)所示。
dq的轴电感,如公式(7)所示。
式中:Ld、Lq分别为d轴和q轴电感;Lsσ为相绕组漏电感;Lmd、Lmd分别为直轴和交轴等效励磁电感。
电磁转矩方程如公式(8)所示。
由公式(3)~公式(8)可以看出,PMSM 在ABC轴系下的数学模型具有非线性、时变性以及耦合性的特点。在经过dq轴分解后,坐标系由三相静止坐标系变为两相正交旋转坐标系,消除了数学模型的耦合性和时变性,并消弱了非线性。通过解耦励磁分量和转矩分量,实现类似于他励直流电机的独立控制,对电流的控制实际上就是对dq电流矢量的控制。
2 双PWM 变换器的控制策略
2.1 网侧控制策略
PWM 整流器的控制如下:1)控制直流母线电压并降低电压纹波。2)实现单位功率因数运行,以降低损耗。3)降低电流谐波含量,提高电能质量。4)对有功功率与无功功率进行控制。
控制策略包括电流控制策略、并网控制策略以及其他控制策略[4]。
本文采用的是并网控制策略中常用的电压定向的矢量控制策略[5],其控制框图如图2所示。

图2 电压定向的矢量控制策略
电压定向的矢量控制策略,根据Clarke 变换与Park变换,将三相静止坐标系下的物理量转换为两相旋转坐标系中,使直轴或交轴与电网合成电压矢量对齐,内环采用电流PI 控制器,外环采用电压PI 控制器实现无静差跟踪,利用SVPWM 或SPWM 调制方式驱动功率器件,参数设计与整定相对简单,因此可实现对有功和无功的独立控制[6]。
2.2 机侧控制策略
逆变器侧的控制对象是永磁同步电机,其控制策略是控制器的核心,对电机运行性能和效率有很大影响。电机的控制目标通常为实现位置、转速、力矩控制。当前常见的控制策略主要包括恒压频比控制、矢量控制、直接转矩控制[7]。
本文采用常用的矢量控制,其控制框图如图3所示。

图3 矢量控制
矢量控制(Vector Control,VC)于20世纪70年代提出,其目的是使交流电机获得与直流电机类似的控制特性。矢量控制基于检测到的交流电机的相电流与角位置,通过坐标变换将三相静止坐标系的物理量转换到两相旋转坐标系下,实现电机励磁与转矩之间的解耦,可分为转子磁场定向控制和定子磁场定向控制2 种。一般为转速电流双闭环的结构结合SVPWM 等调制技术实现电机调速。当前矢量控制主要研究结合模糊控制、自抗扰控制、滑模控制等非线性控制策略提升调速性能,针对减少成本与体积问题的无位置控制策略,解决高速情况下交直轴电流交叉耦合等问题。
3 仿真
3.1 仿真条件
根据上述理论,网侧采用电网电压定向的矢量控制,机侧采用矢量控制,实现机侧和网侧的独立控制和能量的双向流动。仿真条件如图4所示,包括空载启动、正转电动、反转电动、正转制动和反转制动5 个部分。转矩在在-10 N·m~+10 N·m进行阶跃变化,转速为-1 000 r/min~1 000 r/min,并采用斜坡过渡。

图4 电机四象限运行条件
网侧与机侧仿真参数见表1 和表2。

表1 网侧仿真参数

表2 机侧仿真参数
3.2 机侧仿真结果
电机在空载状态下启动,其转速能够良好地跟随设定值,当0.2 s 时,电机进入正转电动制动状态,由于负载突变较大,因此转速出现短暂提高的情况,但随后迅速稳定至设定值。电机之后的反转电动和反转制动过程与正转情况相似,均能够良好地跟随设定值。如图5所示。

图5 电机转速
电机在空载状态下启动,随着转速提高,电磁转矩也逐渐变大,当0.2 s 时,电机进入正转电动状态,其电磁转矩跟随设定值并基本稳定在约10 N·m。当0.4 s 时,电机进入正转制动状态,电磁转矩迅速下降至峰值约-12 N·m,然后迅速恢复至设定值约-10 N·m。电机之后的反转状态与正转状态相同,电磁转矩的变化情况也相同。如图6所示。

图6 电机转矩
q轴的电流变化曲线和电磁转矩一致,实现了对转矩的控制,d轴电流基本稳定在0,实现了id=0 矢量控制。如图7所示。
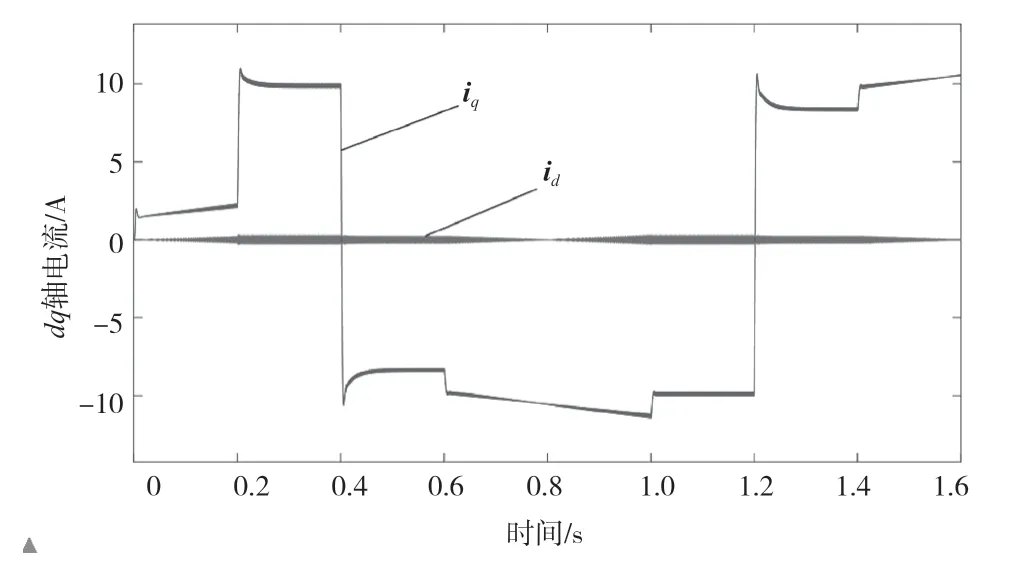
图7 dq 轴电流
随着电机转速的提高,有功功率也相应提高。当电磁转矩发生突变时,有功功率迅速提高并保持稳定。可以观察到,当电机处于电动状态时,有功功率为正,能量由电网流向电机。而当电机处于制动状态时,有功功率为负,能量由电机流向电网,体现了能量的双向流动特点。如图8所示。

图8 电机有功功率变化曲线
3.3 网侧仿真结果
当电机处于空载启动状态时,直流母线电压会迅速升高并且其响应速度很快,但也会存在超调的情况。随后,在0.2 s 内,电机将进入正转电动状态,导致负载突然增加,进而使母线电压下降。但是,电压会迅速恢复并稳定在给定的水平。0.4 s 电机进入正转制动,由于电机存在能量回馈,这部分能量缓冲在母线电容上,造成母线电压上升,之后又迅速恢复为给定。电机进入反转情况与正转类似。如图9所示。

图9 直流母线电压
4 结语
本文针对传统永磁同步电机控制策略能量利用率低的问题,采用了双PWM 变换器的控制策略,其中,对网侧采用了电网电压定向的矢量控制,而在机侧,则选用了常用的id=0 矢量控制。通过SVPWM 调制技术,提高了电压的利用率,并在MATLAB/SIMULINK 软件中对其进行了仿真验证。仿真结果表明,本文提出的控制策略能够实现网侧和机侧能量的双向流动,从而有效地减少了能量的损耗。此外,该策略还使网侧能够以单位功率运行且机侧控制性能良好,使其能够达到理论预期的运行状态。