宽光谱多传感器轴一致性检测系统设计
2024-02-29朱运东王劲松
邹 韵, 朱运东,2*, 王劲松,2
(1. 长春理工大学 光电工程学院,吉林 长春 130012;2. 长春理工大学中山研究院,广东 中山 528437)
1 引 言
随着光学成像技术的不断发展,光电系统的构成也逐步趋于多样化、复杂化[1-2]。现今多传感器光电系统将激光测距、红外成像、电视跟瞄等技术相结合并快速发展,被广泛应用于军事领域,提升了武器装备在作战和生存方面的能力,在现代战场上扮演着必不可少的角色[3]。多传感器光电系统光谱几乎覆盖了从可见光到红外波段的全部范围[4],具有多谱段观瞄、跟踪、发射和接收多个光路子系统,这些光路的轴线要求保持一致,否则会严重影响目标探测和定位的准确性,进而降低目标打击的精度[5]。因此保证多传感器光电系统内各子系统轴间一致性就显得尤其重要[6-8]。在多传感器光电系统生产和使用过程中,必须对其进行光轴一致性检测和调校。
近年来,人们在多传感器光电系统光轴一致性问题方面展开了广泛研究。肖作江[9]等人利用离轴抛物镜,对光学瞄具红外、白光瞄准轴以及激光发射轴三轴一致性检测问题进行了相关研究;贾文武[10]等人针对经纬仪提出了一种能够满足靶场使用需求的光轴平行性检方法;黄富瑜[11]等人采用光轴平移设计思想,实现大跨度范围内光轴平行性检测;张洋[12]通过CCD 相机对激光辐射光斑进行实时采集,针对机载光电观瞄系统中红外瞄准线与激光辐射轴的视轴偏差角进行测试;以色列CI 公司[13]的O-AWBS 武器轴线检测系统采用相交校靶法实现大跨度检测,适用于野外检测。上述现有轴一致性检测方法,其检测光谱波段范围较为局限且检测波段不连续,或需要在特定条件下、针对特定类型的光电设备光轴进行检测,通用性不好。为解决此问题,本文设计一种基于光路切换和光热转换设计思想的宽光谱多传感器轴一致性检测系统。推导了光轴一致性检测模型,设计了系统结构,分析了检测系统精度,能够为多光谱多传感器光电系统的轴一致性检测提供通用的检测和调校手段。
2 轴一致性检测系统原理
2.1 系统检测原理
宽光谱多传感器轴一致性检测系统(以下简称为检测系统或系统)可以对具有可见光到红外波段的多光谱多传感器系统(以下简称为被测品)中的光路子系统进行光轴一致性检测,其系统组成如图1 所示。
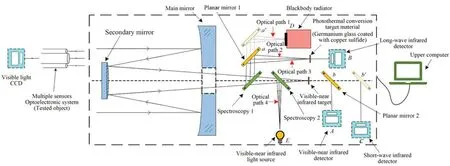
图1 系统检测原理图Fig.1 System detection schematic diagram
检测系统中包含反射式平行光管、光源及探测器组件以及被测品后方的可见光CCD 相机,并由上位机对检测系统进行控制。其中反射式平行光管包含主镜及次镜两部分;光源及探测器组件中包含黑体和可见-近红外光源、可见-近红外靶标、光热转换靶材以及在不同波段下工作的探测器;被测品后方的可见光CCD 相机用于观察被测品目视镜视场内的场景。
在主镜后方,通过分光镜及可移动的平面反射镜将主镜后的光路分成四个路径。其中,光路1 由系统内置黑体提供红外光光源,光路4 提供可见-近红外光源,两个光源均可将光源前置标准靶标图像投射到被测品的光学成像系统中;光路2 和光路3 通过不同工作波段的探测器,采集被测品所发出的不同波段激光的光斑图像信息。平面反射镜的移动是通过上位机控制步进电机实现的,反射镜可以根据检测需要在导轨上进行位置移动,从而实现检测系统的光路切换。
由于长波红外探测器工作波段为8~14 μm,无法直接采集其他波段范围内的激光,因此在像面处放置光热转换靶材,将短波长的光斑转换为热斑,使用长波红外探测器实现对各波段激光光斑图像采集。锗玻璃作为红外玻璃,具有折射率和色散热变化小的特点,可以用作光热转换靶材的基体材料。硫化铜作为光热转换材料,在808 nm 激光照射下,几秒内能够迅速升温至100 ℃,具有明显的光热升温效果[14]。因此,选择镀有硫化铜的锗玻璃作为光热转化靶材,能够有效地扩大系统光谱检测范围,实现单探测器的多谱段检测。
在对被测品进行检测之前,需要对系统进行初始标定,以某一光路为基准轴,对其他光路进行坐标标定,并将标定坐标记为系统基准轴坐标,完成对检测系统的初始标定。
检测系统可以对被测品中观瞄、跟踪光路子系统光轴进行检测,即模拟无穷远标准靶标图像信息的投射系统;同时也可对被测品所发出的激光光轴进行检测,即作为激光接收系统进行图像输出。
(1)观瞄、跟踪光路子系统光轴检测
以红外光轴作为检测过程基准轴为例,首先将被测品红外光轴对向平行光管焦面位置处的分划,使得被测品基准轴瞄准红外分划中心;然后将被测品切换到可见光观瞄状态,通过放置在被测品后方的可见光CCD 相机拍摄目视镜视场内的景象,通过上位机对图像中被测品瞄准分划的坐标值进行判读;系统将所读取坐标与基准坐标进行对比,得出被测品红外光轴与可见光光轴的偏差。
(2)激光光轴检测
将被测品放置好并固定,被测品向检测系统发射激光,通过主次镜照射到光热转化靶材上形成热斑,或照射到可见光-近红外靶标上,光斑可被长波红外探测器、可见-近红外探测器或短波红外探测器采集生成光斑图像,随后通过上位机对激光光斑位置进行判读,得到光斑灰度重心的坐标值;将所读取坐标与基准坐标进行对比,得出激光光轴的偏差。进而可以获取任意两光轴之间的夹角大小。
2.2 轴一致性夹角计算
轴一致性检测系统各部分组件安装调试完成后,将各子系统与上位机相连。系统各部分组件基本保持水平位置,保证各系统组件之间的中心高度一致,确保系统光束按照预定路线传输。当被测品位置固定好后,以红外光轴作为检测过程基准轴为例,按照2.1 节中所描述的系统检测过程进行操作,可以依次得到被测品可见光光轴坐标、可见-近红外激光光斑坐标、短波红外激光光斑坐标以及长波红外激光光斑坐标。
如图2 所示,展示了任意两光轴光斑在空间中的投影模型,图中A(xa,ya),B(xb,yb)为任意两光轴光斑的坐标位置,根据光斑坐标位置信息可计算任意两光轴之间夹角θ,如式(1)所示:

图2 激光光斑空间投影模型图Fig.2 Laser spot space projection model
3 系统设计
3.1 检测系统光学设计
宽光谱多传感器轴一致性检测系统的主要设计参数如表1 所示。根据系统设计参数要求,确定合适的初始结构,并结合检测系统具有多个光路的特点,对光学系统进行具体设计及像质评价分析。

表1 光学系统设计参数Tab.1 Optical system design parameters
宽光谱轴一致性检测系统基于经典卡塞格林反射式系统,其主镜为抛物面,次镜为双曲面,能够完全校正球差。使用光学设计软件ZEMAX进行像差校正和系统优化,根据系统设计要求,设置相关系统参数,系统总焦距为4 800 mm,主镜焦距为1 200 mm,主镜直径考虑结构装夹因素而设定为610 mm,系统总光谱波段范围为0.4~14 μm,主波长设为632.8 mm。
由于系统具有多个连续的工作波段,因此需要采用分光镜和反射镜进行光路结构组合,以实现不同波段范围的光学功能。根据系统设计要求,将系统光路结构细化为四种。图3 展示了该系统的光学结构图,并使用不同颜色表示系统在不同工作波段下的光路结构( 彩图见期刊电子版)。

图3 轴一致性检测光学系统结构Fig.3 Structure of axis consistency detection optical system
在对光学系统的设计完成后,还需进一步对系统进行像质优化设计,以实现系统能量的最佳集中,确保系统结构紧凑、尺寸较小。图4~图6为系统在长波、中波、可见-近红外以及短波红外波段范围内的MTF 图及点列图,图7 为垂轴像差图,从这些图中可以看出,系统在不同波段下的RMS 弥散斑直径均在9 μm 以下,表明该系统的能量集中度较好。

图4 长波红外的MTF 和点列图Fig.4 MTF and spot diagram of long-wave infrared

图5 中波红外的MTF 和点列图Fig.5 MTF and spot diagram of mid-wave infrared

图6 可见-近红外及短波红外的MTF 和点列图Fig.6 MTF and spot diagram of visible-near infrared and shortwave infrared

图7 垂轴像差图Fig.7 Vertical axis aberration diagram
3.2 检测系统结构设计
在上述系统光学设计基础上,完成平行光管的整体结构设计,主要包括主次镜支撑结构设计,光源及探测器组件光学平台设计,并完成了系统的整体搭建。轴对准测试系统整体结构如图8 所示。

图8 轴对准测试系统整体结构Fig.8 Overall structure of the axis alignment test system
3.2.1 主镜及支撑结构设计
选用微晶玻璃作为主镜设计材料,以满足机械加工强度和低热膨胀系数的需求。主镜为反射镜,放置于光轴水平位置,采用多点侧面支撑技术来提供机械支撑。这种支撑方式将支撑力作用于反射镜侧面下端,并通过侧支撑杆连接两个保护托块,起到托举主镜的作用。保护托块与主镜之间使用软垫片,以确保两者不直接接触。在此基础上,反射镜顶端增加了一个顶支撑,由支撑杆连接支撑背板,并与固定在主镜室上的支撑座相连。同时,在主镜正反两面均有均布的六个支撑点,用于轴向支撑并提供辅助支撑。主镜的支撑结构如图9 所示。

图9 主镜支撑三维结构图Fig.9 Three-dimensional structure of primary mirror support
3.2.2 次镜及支撑结构设计
次镜为“蘑菇型反射镜”,通过四翼梁将次镜座与次镜室外框连接固定,使用聚氨酯橡胶黏合剂将次镜镜片与次镜座相连。与机械紧固方式相比,该结构应力分布更均匀,具有一定的柔性。因检测系统的工作环境为室内,聚氨酯橡胶黏合剂是较为适宜的选择。次镜座中配备有三维位移台,可实现对次镜的三维调节。次镜支撑的三维结构图如图10 所示。

图10 次镜支撑三维结构图Fig.10 Three-dimensional structure of mirror support
3.2.3 光源及探测器组件
在轴一致性检测系统中,探测器组件作为实现检测功能的重要组成,其主要由光源组件(包含黑体及可见光光源)、可见-近红外探测器、短波红外探测器、长波红外探测器构成。图11 展示了光源及探测器组件光学平台结构分布情况。从图中可以看出,两个平面反射镜分别固定在导轨上,并可通过上位机控制步进电机进行位置移动,实现检测系统的光路切换,满足系统在不同波段范围下的检测要求。

图11 光源及探测器组件光学平台分布Fig.11 Optical platform distribution of light source and detector
系统采用溴钨灯作为可见光光源,用于照亮分划板,溴钨灯波长范围相对较广,约为320~2 500 nm,能够满足系统需求。可见光光源模块及分划板整体支撑结构如图12 所示。光源模块中含有能够沿光轴方向移动的透镜组,通过凸透镜实现对光线的聚焦,从而增强照明效果。

图12 可见光光源模块三维模型Fig.12 Three-dimensional model of visible light source module
在长波红外像面放置镀有硫化铜的锗玻璃基体作为光热转换靶材,能够满足宽光谱工作需要,激光等光斑照射到靶材上以热斑的形式展现,便于长波红外探测器准确读取光斑位置坐标。光热转化靶材支撑固定结构如图13 所示。

图13 光热转化靶材支撑结构Fig.13 Supporting structure of photothermal conversion target
4 系统精度分析
精度是精密测量仪器最为关键的技术指标之一,在对轴一致性检测系统的总体精度分析时,主要从以下几个方面进行:
4.1 角度测量误差
根据实验,可利用提取激光光斑中心位置的方法来计算角度测量误差。根据光轴偏角计算公式,结合光斑中心提取误差σθ(约±2 pixel),即可得到由光斑中心提取引起的角度测量误差值:
4.2 反射镜平行性误差
检测系统中存在平面反射镜,由于工艺水平限制,分光镜与平面反射镜之间存在平行性误差,但可将其控制在10″之内,即u21=10″。平面反射镜安装在导轨上,由于导轨的平行度为0.1/3 000 mm,即导轨平行度u22≈6.84″,因此反射镜平行性误差为:
4.3 对准误差
轴一致性检测系统中。针对可见光源目标的对准方式采用目视瞄准,但该方式会引入对准部分对准误差。由于人眼进行交叉对准时的极限分辨角为θ′=60″,瞄准系统放大倍率为Γ,当Γ=8 时瞄准轴的对准误差为:
4.4 焦距误差
通常情况下,对于焦距较长的光学系统,可选用精密测角法对系统焦距进行测量,使用经纬仪对系统焦距进行测量。如图14 所示在测量系统焦距时,在主镜前方放置玻罗板,通过次镜后方放置的经纬仪对系统焦距进行测量,实验测量数据如表2 所示。

表2 焦距测试结果Tab.2 Focal length test results

图14 系统焦距测量实物图Fig.14 Physical image of system focal length measurement
由此可得,由于焦距测量误差所引起的测量角度误差大小为:
4.5 检测系统测量误差
由于上述误差之间相互独立,因此可以计算出检测系统的测量总误差为:
根据国军标要求,对于测角类光电装备,其光轴平行性误差的最高要求是15′[15],本系统最大测量误差为17.24″,因此该系统具有较高的检测精度。
5 实验结果与分析
5.1 导轨往返运动对坐标判读的影响
为了判断导轨运行过程对系统坐标读取准确度的影响,如图15 所示,通过控制步进电机使得导轨在可见光及短波红外探测器之间(即A,B位置间)往返运动,依次读取光斑位置坐标信息,进行多组实验,每组往返十次。表3 展示出一组光斑坐标数据信息,并求得坐标位置标准差,标准差均小于0.01 mrad,因此导轨运行过程中对系统精度影响可以忽略不计。

表3 导轨往返运动坐标Tab.3 Coordinates of reciprocating motion of the guide rail

图15 导轨往返运动位置图Fig.15 Diagram of reciprocating motion positions of the guide rail
5.2 系统测量准确度
将指示激光器位置固定,在其前方放置光楔,如图16 所示,通过上位机读取放置光楔后的光斑坐标,与未放置光楔时的光斑坐标对比计算坐标移动量,并将移动量与光楔偏光角相对比计算相对误差。

图16 测量准确度检测实验Fig.16 Experimental measurement accuracy detection
实验数据如表4 所示,其中光楔1 的楔角为0.083°,光楔2 楔角为0.333°。

表4 测量准确度实验坐标值Tab.4 Experimental coordinate values of measurement accuracy
通过计算可以得出,光楔1与光楔2的坐标移动量与光楔偏光角的相对误差分别为1.30%,0.96%,均小于1.5%,满足仪表精度1.5级的要求[16]。
6 结 论
本文设计了一套宽光谱多传感器轴一致性检测系统,该检测系统能够实现0.4~14 μm 波段光谱范围的检测;通过光热转换元件和光路切换机构可实现单探测器的多谱段检测,避免工作波段发生变化时更换探测器的复杂步骤,提高系统检测灵活性的同时大幅降低系统成本。经过系统误差分析,最大测量误差为0.1 mrad,精度可满足当前绝大部分光电装备的轴一致性检测要求,并通过实验验证了检测系统的可靠性。
