泊松点距离约束下无人机辅助地面应急网络覆盖性能研究*
2024-02-28乌云嘎姚媛媛潘春雨岳新伟李学华
乌云嘎,姚媛媛,潘春雨,岳新伟,李学华
(北京信息科技大学 a.信息与通信工程学院;b.现代测控技术教育部重点实验室,北京 100101)
0 引 言
在我国的传统应急通信措施中,将应急通信车作为地面中继,存在范围小、成本较高、无法快速部署等问题,且由于地面环境的约束,通信车难以找到合适的放置位置;应急卫星通信由于其传输链路过长,难以实现即时通信,且较难应用于商业;D2D(Device-to-Device)通信虽然可以实时通信,但其覆盖范围小,传输链路有限,难以满足应急通信需求。
无人机(Unmanned Aerial Vehicle,UAV)作为5G的关键技术之一,具有高机动性、灵活部署、良好视距链路等优势[1],无人机辅助地面网络正在成为一种潜在的应急通信解决方案[2]。文献[3-5]考虑的大多为单无人机辅助地面网络的方案,难以实现地面多用户的覆盖。
目前,已有许多文献展开了对多无人机辅助地面网络建模的相关研究。文献[6-8]的研究中,无人机的数量与位置通常为固定值,忽略了无人机部署的随机性。因此,为满足应急区域内的容量需求,通过部署大规模无人机来评估网络性能更具有现实意义。
随机几何作为一种被广泛使用的数学工具,可以应用于大规模节点部署和性能分析,这也为无人机辅助地面网络的研究提供了参考。文献[9]将地面基站(Ground Base Station,GBS)与无人机的位置建模为两个独立的齐次泊松点过程(Homogeneous Poisson Point Process,HPPP),根据链路状态分析不同信道模型下的网络覆盖性能。文献[10]将无人机的位置建模为二项式点过程(Binominal Point Process,BPP),研究了发射节点的固定位置和随机位置对覆盖性能的影响。文献[11]用空间泊松点过程(Spatial Poisson Point Process,SPPP)对无人机的位置进行建模,提出了高度和发射功率优化算法,以最大化系统吞吐量。但上述文献没有考虑到无人机部署中覆盖区域的重叠问题,可能会带来较大的干扰以及资源浪费。
文献[12]将无人机与地面用户的位置建模为基于距离约束的Matern聚类过程,通过配置发射功率,密度等参数分析网络性能。文献[13]提出了无人机辅助小区边缘用户的网络模型,将无人机与地面用户的位置建模为带有距离约束的PCP,分析了网络的覆盖性能。然而,上述文献忽略了基站的满载情况,这可能会影响到地面用户的通信质量。
考虑到应急场景中无人机与用户分布的随机性,为实现网络区域内用户通信质量的稳定,同时避免无人机覆盖区域重叠带来的干扰,根据上述分析,考虑应急通信场景下用户激增的情况,本文将新增用户的位置建模为泊松点过程(Poisson Point Process,PPP),位于地面基站覆盖范围外的用户由无人机提供服务;位于地面基站覆盖范围内的用户,基站没有满载时由地面基站提供服务,根据基站负载传输协议(Base Station Load Transfer Protocol,BSLTP),超过基站满载用户数量时的用户由无人机提供服务。该协议能较好地协调无人机与地面基站之间的通信容量,可有效实现地面用户全覆盖。为提高无人机部署效率,本文提出泊松点距离约束策略(Poisson Point under Distance Constraint,PPDC)下的无人机部署方案,利用随机几何工具分析了用户、基站之间的干扰。基于所提网络部署模型,综合分析了无人机的高度、新增用户密度、无人机覆盖半径等参数对网络覆盖性能的影响,通过设置系统参数可改善网络性能,对应急通信场景中无人机的应用具有一定的意义。
1 系统模型
1.1 无人机辅助地面基站网络模型
本文考虑由地面基站、大规模无人机、地面用户组成的上行链路。如图1所示,在应急通信场景下会,用户数量激增,地面基站无法满足全部用户的通信需求,此时通过部署无人机作为空中基站为新增用户提供通信服务,可有效提高网络整体覆盖率。图1(a)所示为正常通信情况下,基站服务在其覆盖半径内原始用户的场景。图1(b)所示为应急通信场景中用户激增情况下,所提无人机辅助地面网络部署方案,当地面基站超载时,新增用户可由无人机提供通信服务以保证应急通信场景下的用户通信质量。其中,地面基站的分布服从密度为λg的PPPΦg。将原始用户的位置建模为泊松簇过程(Poisson Cluster Process,PCP)Φgu,密度为λgu。原始用户以每个地面基站为父点,成簇地分布在以地面基站为圆心、半径为Rg的圆形区域内,且子过程之间是相互独立的。应急通信场景下,新增用户的分布服从密度为λa的PPPΦa,假设所有用户具有相同的传输功率P。无人机群的分布服从密度为λu的带有距离约束的PPPΦu,即无人机的覆盖区域不存在覆盖冗余,且无人机距离地面高度固定为H。

(a)正常通信情况
用f(r)表示地面基站覆盖范围内原始用户到目标基站的距离的概率密度函数:
(1)
无人机覆盖区域内的用户通常更为密集,随着新增用户的增加,无人机覆盖区域会产生覆盖重叠,此时在其重叠区域内的用户会对相邻的无人机造成较大干扰。基于以上模型,可采用带有距离约束的PPP对无人机的位置进行建模。
1.2 泊松点距离约束策略(PPDC)
无人机覆盖区域内的用户通常更为密集,随着新增用户的增加,无人机覆盖区域会产生覆盖重叠,此时在其重叠区域内的新增用户会对相邻的无人机造成较大干扰。基于以上模型,可采用泊松点距离约束策略(Poisson Point under Distance Constraint,PPDC)对无人机的位置进行建模。假设两个相邻无人机所服务的簇之间的水平距离为D=2Ru+Δ(Δ>0),Ru为无人机所服务的簇半径。如图2所示,将PPDC策略应用实际应急通信场景进行建模。此时,无人机的覆盖区域没有发生重叠情况。
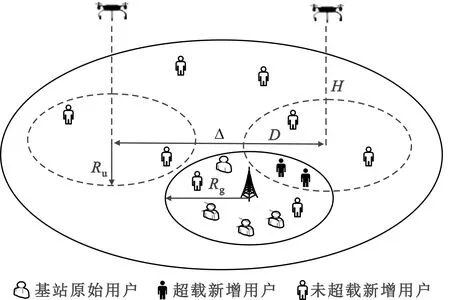
图2 PPDC策略与BSLTP协议下的无人机通信网络
1.3 基站负载传输协议(BSLTP)
基于无人机辅助地面基站的网络模型,本文提出一个基站负载传输协议,该协议具体内容为:每个基站在其覆盖范围内都有固定的所能服务的用户数量阈值m,在流量激增时基站覆盖范围内会出现新增用户。当新增用户数量p与基站原始用户数量q的总和超过阈值m时,基站将不能为超出数量的新增用户提供服务,此时,这些用户将由位于其上方的无人机提供服务。如图2所示,位于地面基站覆盖范围内的超载新增用户将由位于其上方的无人机提供通信服务。
1.4 信道和干扰模型
1.4.1 信道模型
无人机辅助地面新增用户进行通信,由于地面存在高楼等障碍的阻挡,无人机与用户之间的链路既存在视距链路(Line of Sight,LoS),也存在非视距链路(None Line of Sight,NLoS)。本文考虑用h表示莱斯信道增益,h由LoS信道矩阵分量hLoS和NLoS信道矩阵分量hNLoS组成,因此空地信道增益h可以表示为
(2)
式中:K表示莱斯因子,定义为直达信号与散射信号功率之比(K→0时莱斯分布可近似为瑞利分布,K→∞时空地信道为LoS信道);d为无人机到用户的距离;α为路径损耗系数。为便于计算,在本文中考虑K→0的散射场景,此时,信道模型服从瑞利分布,传输信道服从均值为1的指数分布[19]。
1.4.2 地面基站处的干扰模型

假设典型原始用户x0向地面基站发送信号的传输功率为Px0,目标基站g0接收到来自其覆盖范围内的用户x0的功率为
(3)

来自簇内其他原始用户的干扰可表示为
(4)

来自簇间其他原始用户的干扰可表示为
(5)

来自应急场景下连接到无人机的新增用户的干扰可表示为
(6)

来自应急场景下连接到地面基站的新增用户的干扰可表示为
(7)

因此,在目标地面基站处的信干噪比(Signal-to-Interference plus Noise Ratio,SINR)为
(8)

1.4.3 无人机处的干扰模型

(9)

来自其他新增用户x′的干扰可表示为
(10)

来自地面基站覆盖范围内的原始用户的干扰可表示为
(11)
因此,在目标无人机处的信干噪比为
(12)

2 覆盖性能分析
本文分别从地面基站和无人机的角度来分析网络覆盖性能,此外,还综合分析了系统覆盖性能。
2.1 地面基站覆盖概率
地面基站覆盖概率定义为典型用户向目标地面基站成功发送信息的概率,即在目标地面基站处接收到的SINR超过目标阈值γg的概率,可表示为



(13)

在目标基站g0处,受到来自簇内其他原始用户的干扰的拉普拉斯变换LIintra(ρ)为
LIintra(ρ)=
(14)
式中:n为每个基站覆盖范围内的原始用户数量;步骤(a)为hx,g0服从均值为1的指数分布求得;步骤(b)为笛卡尔坐标变换到极坐标求得。将式(1)代入式(14),并且令t=rα,可将式(14)化简为
(15)
经过进一步转化,可得到LIintra(ρ)的表达式
LIintra(ρ)=
(16)

在目标基站g0处,受到来自簇间其他基站覆盖范围内原始用户的干扰的拉普拉斯变换LIinter(ρ)为
LIinter(ρ)=
(17)
式中:步骤(a)为hx,g0服从均值为1的指数分布求得;步骤(b)是由PPP的概率生成函数(Probability Generating Functional,PDFL)得到的结果。根据Jensen不等式:[Ex(x)]n≤Ex(xn),可以得到簇间其他基站内的原始用户对目标地面基站产生干扰的拉普拉斯变换的上界,该上界可由下式给出:
(18)
式中:步骤(a)是由笛卡尔坐标变换到极坐标得到的。
(19)
式中:步骤(a)是通过由PPP的概率生成函数得到的结果;步骤(b)是hzu,g0服从均值为1的指数分布求得;Pa,u为新增用户中连接到无人机的概率,可表示为
(20)

(21)
(22)

exp(-πPa,gλaΓ(1+δ)Γ(1-δ)(ρPzg)δ)
(23)
式中:Pa,g为新增用户中连接到地面基站的概率,可表示为
(24)
将式(16)、(18)、(22)、(23)代入式(13),可得目标地面基站的覆盖概率表达式为
exp(-πPa,uλaΓ(1+δ)Γ(1-δ)(ρPzu)δ)×
exp(-πPa,gλaΓ(1+δ)Γ(1-δ)(ρPzg)δ)
(25)
2.2 无人机覆盖概率
无人机覆盖概率定义为典型用户向目标无人机成功发送信息的概率,即目标无人机处接收到的SINR超过目标阈值γU的概率,表示为

(26)

根据式(22)的推导,同理可得,在目标无人机u0处,受到来自地面基站覆盖范围内原始用户的干扰的拉普拉斯变换LIg(s)表达式为

exp(-πnλgΓ(1+δ)Γ(1-δ)(sPx′)δ)
(27)

(28)
将式(27)、(28)代入式(26),可得目标无人机的覆盖概率表达式为


(29)
2.3 系统覆盖概率
根据上述目标地面基站与目标无人机得覆盖概率表达式,可以得到系统覆盖率为
exp(-πPa,uλaΓ(1+δ)Γ(1-δ)(ρPzu)δ)×
[e-ρσ2×exp(-πλgΓ(1+δ)Γ(1-δ)(sPx′)δ)×
(30)
式中:su是连接无人机的用户占所有用户之比;sg是连接地面基站的用户占所有用户之比;nu是连接无人机用户的数量;ng是连接地面基站用户的数量;N是所有用户的数量。
3 仿真验证
在本文所提的无人机辅助地面基站应急通信网络中,假设无人机的工作频率为2.4 GHz,发射功率为20 dBm,接收灵敏度为-106 dBm,且无人机装备了全向天线用于通信。其中,理论结果通过公式推导得出,仿真结果基于蒙特卡罗方法,通过1 000次仿真得到。以地面基站和无人机的覆盖概率以及系统的覆盖概率作为性能指标,分析无人机高度H、新增用户密度λa、路径损耗系数αg对网络性能的影响。系统参数在表1中给出。
表1 系统参数
图3给出了不同无人机高度对无人机、地面基站和系统覆盖性能的影响。从图中可以看出,理论与仿真结果一致。由图3(a)可见,在SINR阈值超过一定数值时,随着无人机高度的增加无人机覆盖性能下降。这是因为当无人机高度增大时,新增用户距离其服务无人机越来越远,导致无人机服务的新增用户成功传输概率降低,无人机覆盖性能下降。由图3(b)可见,无人机高度增加会使系统覆盖性能降低,这是因为无人机覆盖性能的降低导致系统覆盖性能降低。PPDC策略下的系统覆盖性能要优于传统PPP策略,这是因为当无人机部署没有距离约束时,无人机覆盖区域会存在重叠,其他无人机覆盖范围内的新增用户距离典型无人机较近,干扰增大。
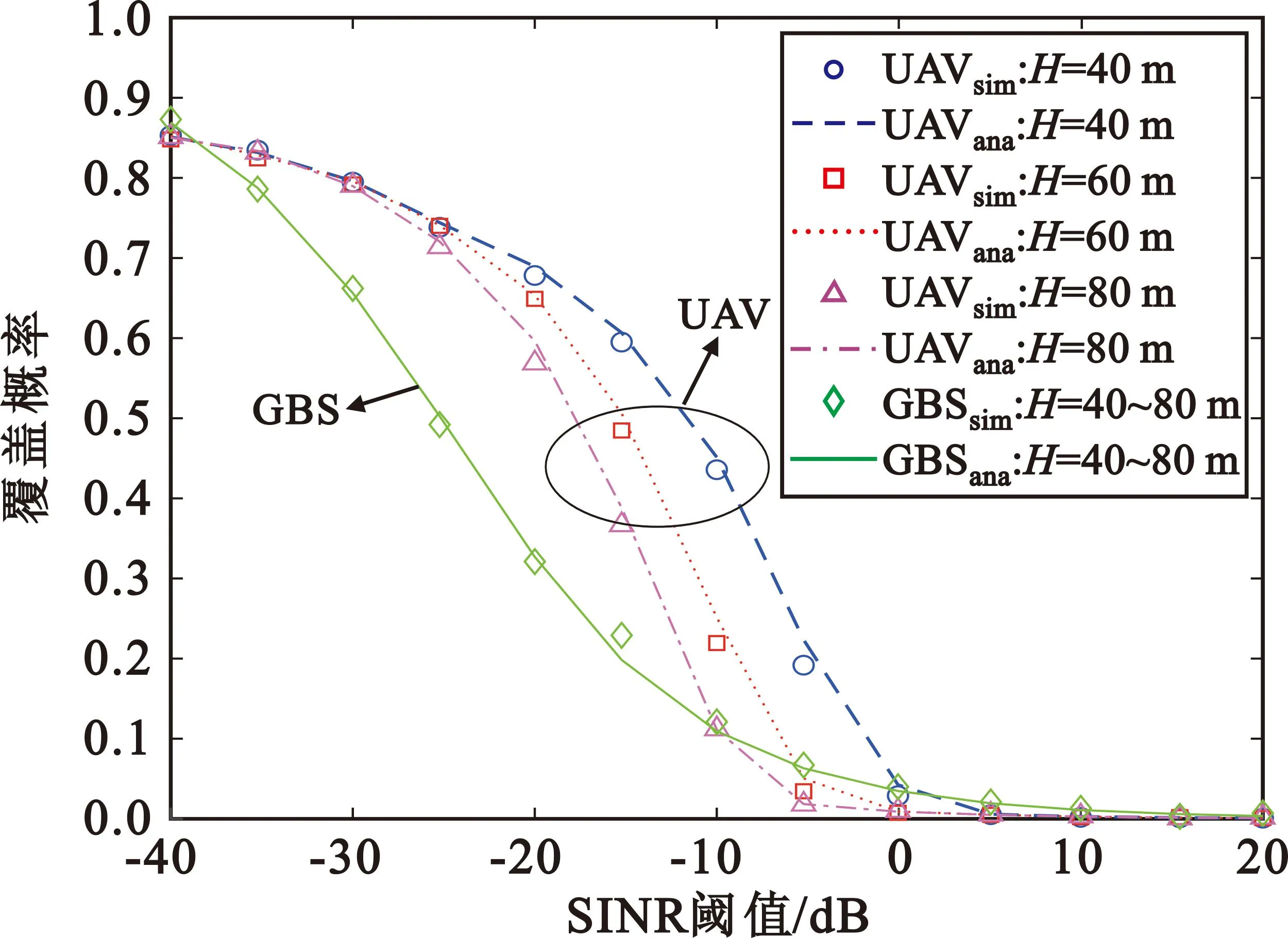
(a)无人机、地面基站覆盖概率
图4给出了不同无人机覆盖半径对无人机、地面基站和系统覆盖性能的影响。由图4(a)可见,无人机的覆盖性能随着无人机覆盖半径的增加而下。这是因为当无人机覆盖半径增大时,新增用户距离其服务无人机距离变远,导致无人机服务的新增用户成功传输概率降低,无人机覆盖性能下降。由图4(b)可见,引入BSLTP协议,系统覆盖性能得到提升。这是因为当基站为不限数量的用户提供服务时,势必要增大其覆盖范围内其他用户对目标通信用户的干扰,基站覆盖性能的下降,从而系统覆盖性能降低。
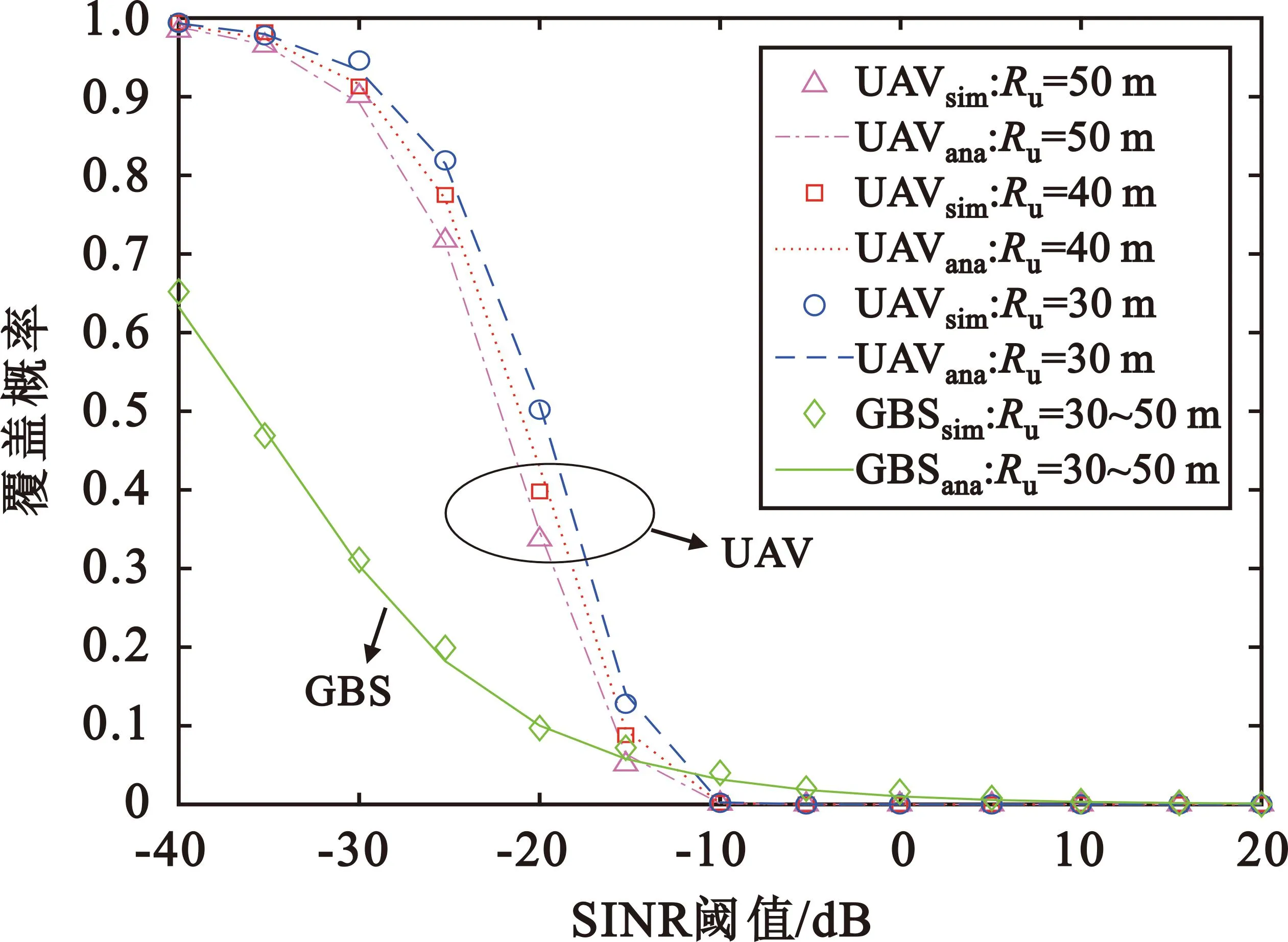
(a)无人机、地面基站覆盖概率
图5给出了不同新增用户密度和无人机高度对系统覆盖概率的影响。随着H增加,系统覆盖概率下降。这是由于本文假设无人机高度与无人机覆盖半径的比值为定值,从图4(a)中可知,无人机覆盖概率随着无人机覆盖半径的增大而下降,因此H增大,无人机覆盖概率降低,系统覆盖概率也随之降低。此外,可以从图中得出,随着新增用户的密度的增加,系统覆盖概率下降。

图5 新增用户密度对系统覆盖概率的影响
图6给出了在固定地面用户发射功率的情况下,不同空地路径损耗系数对系统覆盖性能的影响。从图6中可以看出,减小空地路径损耗系数,使得有效传输信号强度增强,同时也增强了相邻无人机覆盖范围内用户的信号干扰强度,因此系统覆盖性能降低。
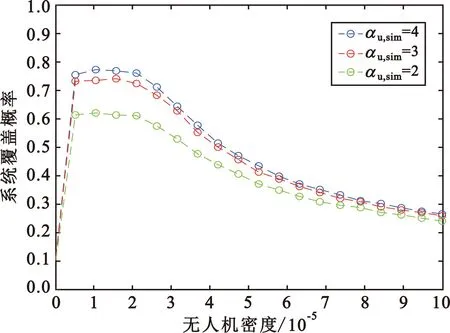
图6 空地路径损耗对系统覆盖概率的影响
4 结束语
本文针对无人机辅助用户激增应急通信场景的问题,考虑到无人机的随机部署会产生覆盖区域的重叠,提出了一种基于距离约束的用户自适应接入方案。在泊松点距离约束策略下,引入了控制连接基站用户数量的BSLTP协议,在用户激增的情况下,当连接到基站的用户数量超过给定阈值时,剩余用户就由无人机提供服务,以解决基站超载问题。理论分析和仿真结果验证了所提PPDC策略以及BSLTP协议下的网络覆盖性能得到了有效提升。本文所提方案对于无人机辅助地面网络中覆盖性能提升的研究有一定的参考意义。
下一步研究将重点关注移动无人机应急场景中的部署,对无人机辅助地面网络的性能进行更有效的提升。