雾天环境下前车车距测量方法研究
2024-02-26盛雨婷
盛雨婷


摘要:为解决雾天环境下道路上车辆与前车车距测量问题,构造车载雾天图像快速处理以及前车车距测量实验平台。以暗通道算法为基础,基于能见度图像分割算法估算大气光值,利用双边滤波细化折射率图,在分割区域上进行不同程度去雾,有效解决暗通道算法应用在道路图像上产生的色彩失真、对比度过低等问题。利用边缘检测算法、霍夫变换算法完成对车辆边框的检测,搭建测距模型测量出前方车辆的距离。结果表明,构造的平台能够在能见度小于100 m的浓雾环境下测量出前方车辆车距,并能及时告警。
关键词:圖像去雾;能见度分割;暗通道算法;双边滤波;边缘检测算法;车距测量
中图分类号:TP751 文献标志码:A 文章编号:1002-4026(2024)01-0088-07
Study on the distance measurement of approaching vehicles in fog
Abstract∶To address the challenges related to distance measurement of an approaching vehicle in fog,we developed an experimental platform to rapid image processing and real-time distance measurement.Firstly,we down-sampled the images through the dark channel algorithm to estimate atmospheric light values. Then, we introduced a tolerance mechanism to deal with the bright regions that do not satisfy the dark channel prior. This tolerance mechanism corrected the estimate with incorrect refractive index of such regions and effectively mitigated the issues of color distortion and low contrast. Secondly, we detected the vertical edges of an approaching vehicle using the edge detection and the improved Hough transform algorithms. Finally, we measured the safe distance from the approaching vehicle using the model. The results shows that the platform developed in this study can effectively measure the distance of the approaching vehiclein fog with a visibility <100 m, and can alert drivers in a timely and effective manner.
Key words∶haze removal; image down-sampling; dark channel algorithm; bilateral filtering; edge detection algorithm; vehicle distance measurement
在行车过程中,雾天天气是影响驾驶员视线的主要因素,因雾天造成的重大交通事故时有发生。相关统计数据表明,雾天环境交通事故发生概率是正常环境下的10倍,85%的连环车辆追尾事故发生在大雾天[1]。雾、霾或沙尘等能见度低的恶劣天气严重影响汽车的摄像镜头,成像观感效果差,图像信息严重缺失。因此,雾天环境下,对车载摄像机图像进行清晰复原化操作对司机的安全驾驶意义重大。
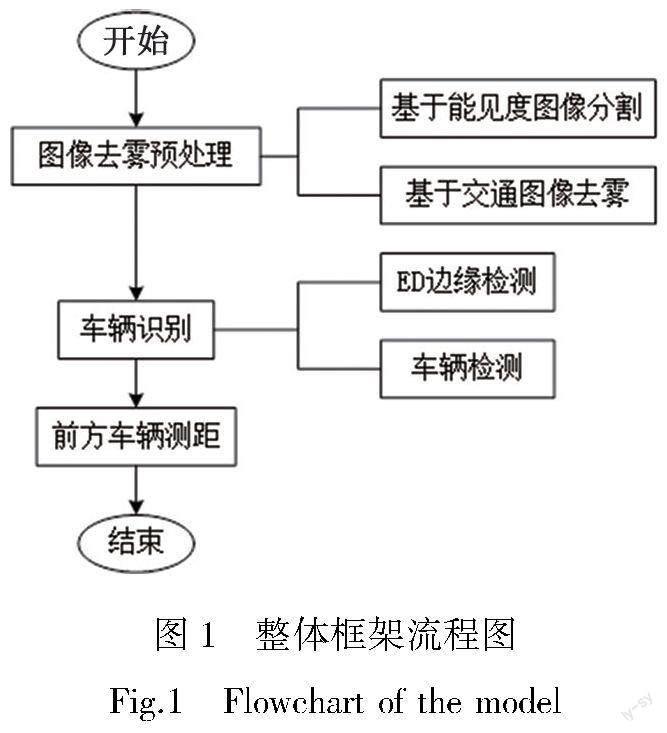
本文基于雾天环境下的行车状况,以车载摄像机为载体,采用能见度分割方法对采集的图像进行去雾处理[2-3],同时对去雾后的图像进行边缘处理,通过模型计算得到前方行驶车辆车距。图1为整体框架流程图。
1 交通图像去雾预处理
1.1 图像分割
1.1.1 能见度的计算
依据交通道路平缓的假设,可将真实世界的距离与图像中的像素相联系。根据图2所示的模型[4]计算能见度。
对于摄像设备拍摄出的图像,创建图像坐标与路面坐标对应关系算式,得到图像坐标中的像素点在实际坐标系中的实际距离d为:
雾天环境下,行驶车辆驾驶员注意的是道路前方的区域。交通图像车道线左右对称分布,车道和车道线宽度固定,车道线亮度高于路面,可依据边缘检测[5-6]和霍夫变换对车道线边缘检测计算得出vh。再根据线性倒立摆(the linear inverted pendulum,LIP)模型中对人眼视觉特性的分析,采用科勒的图像分割方法[7]计算得到对比度图,对比度图中的白色像素点视为人眼可识别的像素,可根据对比度图计算得出v。根据式(1)求出能见度距离d。图3为能见度过程计算仿真结果。
1.1.2 基于能见度的图像分割
实际情况下在观测者距离较近的地方雾气较少,对于道路图像而言,如果远处雾气浓度较大的区域被适度增强,就很有可能造成原图像底部的路面区域过增强。因此,图像底部区域的增强能力应有所限制,以防止近处道路区域过增强,同时保证驾驶员的远处区域得到适度的增强。
为达到这一目的,本文将图像分割成3个部分:天空部分、远处场景和近处道路。分割图的估计过程可如下定义:
式中,参数λ为相机的参数;dmax为被测点与观察者之间距离最大值,当被测点与观察者之间的间隔小于该值时,位于该间隔范围内的雾气较小。根据实际生活经验,对于一幅像素大小为600×400的图像,将dmax值设置为140 m对于大多数情况都成立。根据国际照明委员会定义,对比度大于0.05的像素点人眼能够区分出来,因此针对天空可观测到的目标物,本文设定亮度对比度值為0.05。
1.2 交通图像去雾算法
1.2.1 大气光值的计算
大气光值A是基于暗通道去雾算法的一个重要的参数,交通图像的整体去雾视觉效果取决于该值的准确性。如果通过整幅图像计算出大气光值,可能会导致估错的情况,为了避免这类情况,对分割后图像的天空区域计算大气光值,以确保该值的准确性。
1.2.2 滤波细化折射率图
基于暗原通道算法得到的去雾图像容易产生白色光晕,即称之为Halo现象。产生Halo现象的图像不仅不利于人眼视觉的感官,而且会出现更多的边缘细节,不利于后续的车辆检测,因此本文采用了双边滤波快速细化折射率图[8-9]。
DR为复原图像R的暗通道图,可表示为:
式中,Ωx,y表示以x,y为中心的N×N大小的局部图像块。双边滤波的权值是由高斯和值域高斯函数的乘积组成的,对于暗通道图像的最小值滤波的窗口Ω,在处理图像时使用的是大小相同的窗口,首先对DR两边先除以大气光值A,然后再对这两边进行最小值滤波,得到公式为:
其中,Rcx′,y′表示复原图像颜色通道图,Icx′,y′表示雾天图像的颜色通道,为了使处理后的图像看起来更加舒适,引入常量ω使得图像远处部分留有小部分的雾气,该值一般设置为0.95,最后得出的折射率图为:
1.2.3 基于图像复原的图像去雾
对于大气散射模型而言,当折射率图tx,y趋近于0时,入射光衰减项Rx,y,tx,y也会趋近于0。因此,引入参数t0以保证在原雾气较浓的部分留有小部分的雾气,一般设置为0.1。本文使用分割图,计算出去雾图像R为:
其中I(x,y)表示雾天图像,由上式可知,利用区域分割图,可预先判别3个不同区域的增强程度。因此,原雾天图像的“天空”“远处场景”和“近处路面”这3个区域分别会产生不同的增强效果,以确保驾驶员所关心的中远方区域得到重点增强。
本文的去雾算法流程如图4所示。
暗通道算法由HE[10]提出,该算法通过对无雾图像特征统计,发现在大多数户外无雾图像的任意局部小块中,总存在至少一个像素,该像素某一个或几个颜色通道的强度值很低,且接近于零。本文在暗通道算法的基础上,根据能见度知识对雾天图像进行分割,对天空区域估算大气光值,对分割后的图像分区域进行不同程度的去雾处理,保留原图像的边缘色彩细节。本文改进的算法采用复原后的新增可见之比、可见边的规范化梯度均值、方差和运算时间对去雾结果进行定量估计[11],评估结果见表1。
由表1可以看出本文算法相较于暗通道算法,去雾视觉感官更佳,且其快速的运算时间适用于车载视频实时性的要求。
2 车辆识别
2.1 边缘检测算法
边缘检测算法是通过计算一组锚点来模拟点到点边界补全问题,这些点在给定图像的剧烈强度变化上呈现稳定的地标,然后使用智能路由算法连接连续的锚点。
边缘算法主要流程如图5所示。
2.2 前方车辆识别
由大量交通图像可知,行驶车辆驾驶员看到前方车辆的尾部,都是呈有规律的矩形结构。为了识别车辆垂直边缘,本文利用能够检测直线端点的霍夫变换,提取图像中感兴趣区域内具有车辆垂直边缘特征的峰值直线段[12]。
为了排除公路上路标、广告牌等因素影响,增加识别精度,本文在初次识别时,首先确定一个车辆可能存在区域,然后在此区域内使用霍夫变换提取垂直边缘。图6中T是两条车道线的交点,影响后方驾驶的车辆必定在(T±σ)区域内,其中σ为常量,根据车道线提取,一般取10~30。
3 车辆阴影宽度测距模型
阴影宽度测距法[13]的测距原理如图7所示。
L是前方车辆尾部实际宽度,通常为1.5~1.7 m,具有通用性;D是前方车辆尾部与摄像设备车辆的间距,f是摄像设备的焦距,用像素表示;m是前方车辆尾部在图像中阴影宽度的大小;S表示前方车辆在摄像设备的成像满屏时,前方车辆尾部与摄像设备的距离。
本文采用的摄像设备分辨率是600×400,假定社会中的车辆的尾部宽度一致。最后得到最终测距公式为:
4 实验结果
本文选取3段不同程度雾天的车载视频进行实验分析。3段分别为薄雾、中雾和浓雾的天气情况,实验结果如图8所示,对于上述3段视频的测距结果见表2。
由图8可知,本文改进的去雾算法可以提高雾天图像的清晰度,在交通图像上,不仅使驾驶员关心的前方车辆区域得到了重点增强,而且对图像过度增强的部分进行了有效的抑制,并且去雾后的图像能够更加清晰和准确地识别出前方行驶车辆。表2分别记录了3段实验中原图和去雾后试验车辆与前方行驶车辆的距离。由图8和表2可知,薄雾环境下,去雾前后都能够有效地辨别出行驶车辆,并且去雾前后测量前方车辆距离的数据相差不大,两者的误差不到1%;中雾环境下,去雾前能够检测出前方车辆尾部的垂直边缘,但是存在较大的误差,从而导致测距不够精确,去雾后的图像能更加精准地识别出车辆,去雾前后测量前方行驶车辆距离的数据存在较大的差异;浓雾环境下,原图不能够准确地识别出前方车辆,去雾后可以准确地识别出前方车辆,从而检测出与前方行驶车辆的距离。
5 结束语
基于图像处理技术,首先对雾天环境下交通图像进行快速去雾,再通过边缘检测和霍夫变换获得前方车辆的边缘特征,最后通过测距模型测量出雾天环境下前车的车距。该方法图像去雾不仅能更加准确地识别出前方车辆、提高前方车辆测距的准确性,而且能够有效地测量出雾天环境下前车行驶车辆的车距。在能见度极差的浓雾环境下,原图没有有效车距输出,去雾后测量车距9.49 m,在能见度小于100 m的情况下,能够准确测量车距,能够及时有效地向驾驶员示警,有效减少追尾事故的发生率,具有实际应用价值。但本文仅考虑了前方单个车道的车辆测距,对其他车道上的车辆没有检测,这具有一定的局限性。可以在后续的研究中,针对恶劣天气情况下,对前方行驶车辆完成测距测速等一系列的检测,可以保障恶劣气候下驾驶的安全性。
参考文献:
[1]潘晓东,蒋宏,高昂.雾天高速公路交通事故成因分析及安全对策[J].交通标准化,2006(10):200-203.DOI:10.3869/j.issn.1002-4786.2006.10.060.
[2]胡平. 基于图像分割的交通图像快速去雾算法[J]. 计算机系统应用,2014, 23(9): 134-138. DOI: 10.3969/j.issn.1003-3254.2014.09.025.
[3]毛祥宇,李为相,丁雪梅. 基于天空分割的单幅图像去雾算法[J]. 计算机应用,2017,37(10):2916-2920. DOI: 10.11772/j.issn.1001-9081.2017.10.2916.
[4]宋洪军,陈阳舟,郜园园. 基于车道线检测与图像拐点的道路能见度估计[J]. 计算机应用,2012,32(12):3397-3403. DOI: 10.3724/SP.J.1087.2012.03397.
[5]TOPAL C, AKINLAR C. Edge Drawing: A combined real-time edge and segment detector[J]. Journal of Visual Communication and Image Representation, 2012, 23(6):862-872. DOI: 10.1016/j.jvcir.2012.05.004.
[6]AKINLARC, TOPAL C. EDLines: a real-time line segment detector with a false detection control[J]. Pattern Recognition Letters, 2011,32(13):1633-1642. DOI: 10.1016/j.patrec.2011.06.001.
[7]KOHLER R. A segmentation system based on thresholding[J].Computer Graphics and Image Processing, 1981,15(2):319-338.DOI:10.1016/S0146-664X(81)80015-9.
[8]李炎炎,龙伟,覃宏超,等. 基于车行视程与大气光快速估值的车载视频去雾算法[J]. 工程科学与技术,2017,49(3):217-222. DOI: 10.15961/j.jsuese.201601407.
[9]陆士猛,刘昌锦. 无人机侦察图像快速去雾算法[J]. 红外技术,2015,37(10):847-851.DOI: 10.11846/j.issn.1001_8891.201510008.
[10]HE K, SUN J, TANG X. Single image haze removal using dark channel prior[J]. Pattern Analysis and Machine Intelligence, IEEE Transactions on, 2011, 33(12): 2341-2353.DOI:10.1109/TPAMI.2010.168.
[11]郭璠,蔡自兴. 图像去雾算法清晰化效果客观评价方法[J]. 自动化学报,2012, 38(9):1410-1419.DOI: 10.3724/SP.J.1004.2012.01410.
[12]CHENR B, ZHAO D, WANG Q L. Research on the algorithm of the front vehicle speed based on vehicle video[C]//29th Chinese Control and Decision Conference (CCDC). Chongqing, China: IEEE, 2017:7719-7724. DOI: 10.1109/CCDC.2017.7978591.
[13]佟卓遠. 基于机器视觉的前方车辆检测与测距系统设计[D]. 哈尔滨:哈尔滨工业大学,2015.