高速水下无人航行器仿生外形设计与阻力数值预报研究
2024-02-25马镜兰飞翔游航
马镜,兰飞翔,游航
1. 海装装备项目管理中心,北京 100071
2. 哈尔滨工程大学 水下机器人技术重点实验室,黑龙江 哈尔滨 150001
3. 哈尔滨工程大学 南海研究院,海南 三亚 572000
随着科技的进步,水下无人航行器(unmanned underwater vehicles, UUV)在海洋能源开发、海底地形勘探、海洋科学考察、海洋权益维护、水下智能武器等方面都有着广泛的用途[1]。为满足各种复杂场合的应用,水下无人航行器的发展逐渐向系列化、大海深、长航时、高性能和高仿生[2]方向发展,其中高速和减阻是当前水下无人航行器的研究热点。本文针对某高速水下无人航行器的减阻问题开展研究。
对于减小UUV 艇体的阻力,大体可以从2 个方面进行研究:一种是采用流线型艇体并对其进行一定的优化设计;另外一种则是尽量避免突出艇身之外的附体。水下无人航行器的外形设计以回转体外形作为主流方向,如Seahorse AUV[3]、Autosub AUV[4]等,此外还有扁平形、仿生形以及特殊的外形,例如类似于“比目鱼”的 “SeaOtter”号[5]、 Talisman AUV[6]以及仿生蝠鲼机械鱼[7]等。通常来讲,回转体外形相比其他形状具有更好的水动力性能,且结构简单,制作方便。
目前研究水下无人航行器阻力的方法主要有理论分析、试验测量和计算流体力学(computational fluid dynamics, CFD)方法。其中, 理论分析的结果带有普遍性, 但往往要对计算对象进行抽象和简化才能得到理论解;试验测量方法可以得到真实可信的试验结果, 但是具有周期长、费用高、测试设备复杂和流动可视化困难等缺点;而CFD 方法克服了前2 种方法的弱点, 可以形象再现流场流动细节,且周期短,可以节省人力物力, 具有很好的重复性, 并且方便设置各个参数的变化及考察它们的影响。计算流体力学发展到如今已经相当成熟,数值模拟的精度可以部分替代大量模型试验,CFD 已经成为获取水下无人航行器水动力的重要手段。操盛文等[8]预报了高雷诺数条件下,艇体主尺度与计算域网格数量对潜艇阻力预报结果的影响,得到了网格数量和尺度效应对潜艇阻力数值预报结果的影响规律。李鹏等[9]探究不同湍流模型对直航潜艇阻力和流场仿真的影响。梁晶等[10]预报了带鳍舵的某无人水下航行器阻力特性。刘天天[11]计算了几何参数对不同形状的水滴形潜器和细长回转体潜器阻力系数的影响。Karim 等[12]基于雷诺平均方程(Reynolds average Navier-Stockes, RANS)的有限体积法,用非结构网格计算二维轴对称裸潜艇壳体绕流。Vaz 等[13]采用CFD 方法计算了SUBOFF 模型进行操纵运动所受到的力。徐妍等[14]对7 种不同附体布置的SUBOFF 潜艇模型进行直航运动的数值仿真,分析潜艇表面压力分布情况和潜艇周围速度场特性。
本文基于CFD 技术,针对SUBOFF 潜艇模型及其试验数据,研究了水下无人航行器阻力预报方法,通过与试验数据的对比验证了计算方法的可靠性。在此基础上,参考水下高速游动海洋生物海豚和鲨鱼设计了水下无人航行器仿生外形,预报了SUOBFF 光体模型、仿海豚模型和仿鲨鱼模型的阻力性能,基于计算结果设计了回转体外形,通过计算比较完成了UUV 外形的设计工作。
1 水下无人航行器阻力数值计算方法
1.1 计算模型
针对SUBOFF 标准模型,美国泰勒水池进行了大量的风洞和拖曳水池试验,为计算流体力学的研究人员提供了可靠的试验数据,相关的试验结果可以参考文献[15]。本节利用SUBOFF 全附体模型进行数值计算方法研究,并将其计算结果将与后续模型进行阻力性能对比。
SUBOFF 全附体模型主要包括1 个水滴形的主体部分、1 个围壳和4 个对称的尾翼[16],表1 列出了模型的主要参数。数值计算对象分别为全附体的SUBOFF 模型,记为SUBOFF-1,其三维视图见图1,去除围壳和十字翼的光体SUBOFF 模型,记为SUBOFF-2。

图1 SUBOFF 模型
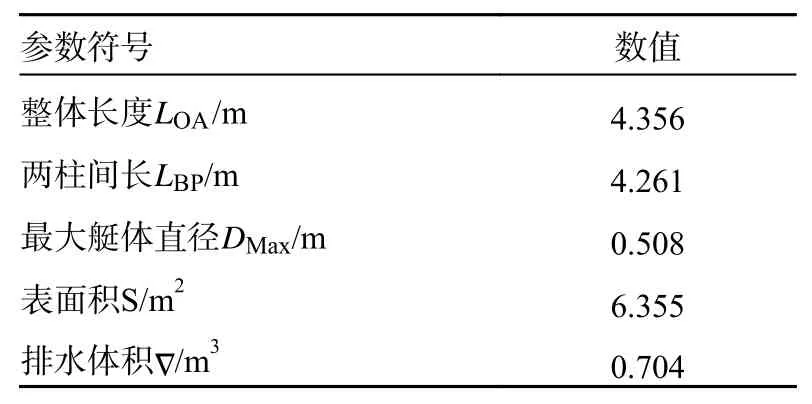
表1 SUBOFF 模型尺度
1.2 计算域及网格划分
计算域采用圆柱形,并用贴体坐标对计算域进行离散,使计算域的边界与坐标曲面一致,并尽量减少贴体坐标中的奇异点,并使网格的分布符合实际模型。为准确捕获近壁区的流场、提高计算精度、节约计算时间,在SUBOFF 模型周围进行网格加密,在远离模型的流场中网格较粗。计算区域由四面体非结构化的网格来进行离散,计算域和模型表面的网格分布如图2(a)和图2(b)所示,整个计算域体网格200 万。
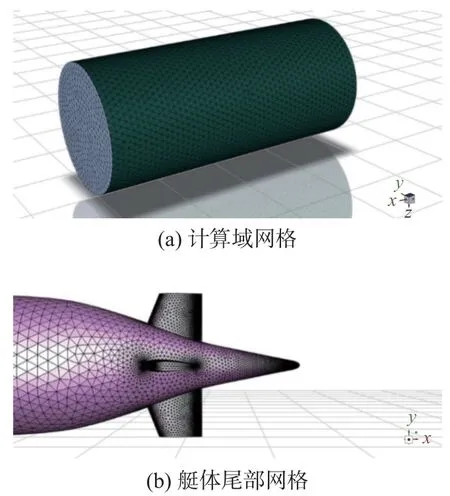
图2 网格示意
1.3 阻力性能计算结果
采用耦合(coupled)方法与剪切应力运输(shear stress transport, SST)k-ω湍流模型对雷诺平均纳维–斯托克斯方程进行求解。在此基础上,将压力方程离散为标准的离散形式,将动量方程、湍流方程和雷诺应力方程分别用二次迎风格式进行离散[17]。以SUBOFF-1 模型在3.046 m/s 的航速下为例,其计算结果的收敛情况如图3 所示,可以看出其阻力值在0.01 N 内波动,即相对于该航速的总阻力其波动在总阻力的万分之一内,说明计算结果收敛。其他模型和航速的计算结果在此不再赘述。
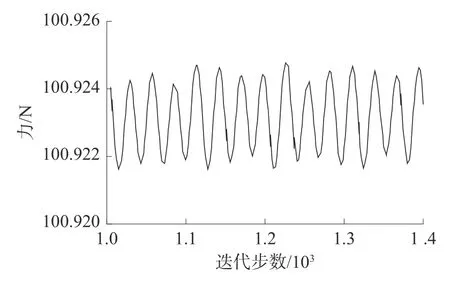
图3 SUBOFF-1 在航速为3.046 m/s 下的计算结果
图4 为SUBOFF-1 模型在3.046 m/s 的航速下的艇体表面压力图,艇艏、围壳以及尾翼为高压的,两者面对来流方向都产生了高压区。在围壳尾部形状收缩使边界层分离,压力急剧减小,这也是产生压差阻力的原因,与实际流场分布一致。

图4 SUBBOFF-1 压力分布云图
SUBOFF 潜艇全附体外形和光体外形的阻力计算结果见表2 和表3。附体对SUBOFF 潜艇总阻力的影响较大,相比于全附体模型,光体模型总阻力最多减小超过20%,且随航速的增加,摩擦阻力占总阻力的比值逐渐降低,由3.046 m/s 航速时的83.73%下降到15.432 m/s 航速时的79.66%,相应的压差阻力发生了同等比例的增加。

表2 SUBOFF-1 计算结果

表3 SUBOFF-2 计算结果
对于全附体的SUBOFF-1 模型,对数值计算结果和试验结果进行比较,具体结果见图5,SUBOFF 艇体的阻力在速度为6.096 m/s 时,阻力计算值与试验值误差相差最大,为1.93%,6 个航速下的平均误差为1.36%,试验值和计算值吻合很好,由此可知本文采用的计算方法具有可靠的计算精度。
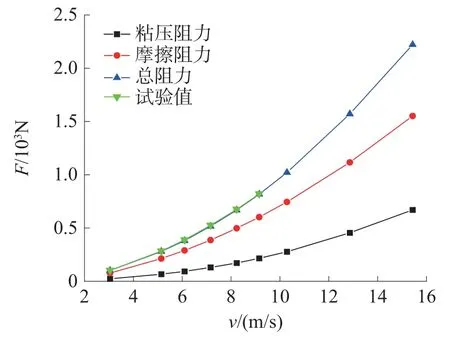
图5 计算与试验对比结果
2 仿海豚和仿鲨鱼外形设计及阻力数值预报
2.1 计算模型
2.1.1 仿海豚模型
仿海豚模型的原始模型通过三维扫描方式重构建模获得,为使计算具有可比性,仿海豚模型长度与标准SUBOFF 模型艇长一致,即艇长都为4.356 m。对仿海豚模型进行去附体处理,共得到3 种模型,第1 种为全附体模型,记为Haitun-1,见图6(a);第2 种为去掉胸鳍后的模型,记为Haitun-2,见图6(b);最后一种为光体的海豚模型,记为Haitun-3,见图6(c)。

图6 仿海豚三维模型示意
2.1.2 仿鲨鱼模型
同样,仿鲨鱼模型长度与标准SUBOFF 模型艇长一致,即艇长都为4.356 m。对仿鲨鱼模型进行去附体处理,共得到3 种模型,第1 种为全附体模型,记为Shayu -1,见图7(a);第2 种为去掉胸鳍后的模型,记为Shayu -2 ,见图7(b);最后1 种为光体的鲨鱼模型,记为Shayu -3,见图7(c)。

图7 鲨鱼三维模型示意
2.2 计算结果
2.2.1 仿海豚模型阻力计算结果
数值计算采用与标准SUBOFF 模型相同的边界条件和计算网格。在9 个航速下Haitun-1、Haitun-2、 Haitun-3 共3 个模型各自的阻力计算结果见图8。表4 给出了各海豚模型的摩擦阻力占总阻力的比值。

表4 海豚模型的摩擦阻力占总阻力比值
由表4 可以看出,随着航速的增加,摩擦阻力和压差阻力都在不断地增加,但是摩擦阻力在总阻力中的占比逐渐减少,3 个模型在航速达到15.432 m/s 时,摩擦阻力占比相比3.046 m/s 时分别降低了3.70%、4.67%、3.42%,且其中光体模型的摩擦阻力占比最高。另外,不同的附体模型,摩擦阻力和压差阻力的比值是不同的,即胸鳍和背鳍会使总阻力快速地增加,即在有背鳍的情况下,去掉胸鳍会引起总阻力减少20%以上;在无胸鳍的情况下,去掉背鳍会引起总阻力减少15%以上。另外通过数据对比发现,去掉胸鳍引起的阻力变化量随速度相对恒定,而去掉背鳍引起的阻力的变化量会随速度的增加有一定的增加。
2.2.2 仿鲨鱼模型阻力计算结果
仿鲨鱼模型Shayu-1、 Shayu-2、 Shayu-3 在9 个航速下各自的阻力计算结果分别见图9(a)~图9(c)。表5 给出各仿鲨鱼模型的摩擦阻力占总阻力比值。
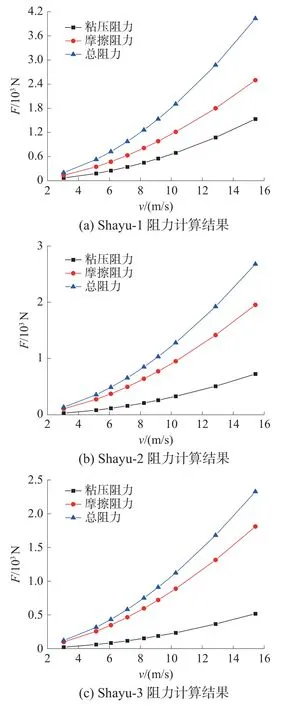
图9 海豚模型阻力计算结果

表5 各鲨鱼模型的摩擦阻力占总阻力比值
表5 显示随着航速的增加,摩擦阻力和压差阻力都在不断地增加,但是摩擦阻力在总阻力中的占比逐渐减少,3 个模型在航速达到15.432 m/s时,摩擦阻力占比相比3.046 m/s 时分别降低了4.54%、5.48%、4.08%。另外,不同附体的仿鲨鱼模型,其摩擦阻力和压差阻力的比值是不同的,仿鲨鱼模型的各鱼鳍会使总阻力快速增加,即在有背鳍的情况下,去掉胸鳍、腹鳍、上臀鳍和下臀鳍会引起总阻力减少30%以上;在无胸鳍的情况下,去掉背鳍会引起总阻力减少10%以上。另外通过数据对比发现,去掉胸鳍引起的阻力变化量随速度相对恒定,而去掉背鳍引起的阻力的变化量会随速度的增加有约3%的增加。
3 高速水下无人航行器构型优选
3.1 SUBOFF、仿海豚模型和仿鲨鱼模型阻力比较
为了比较不同模型的阻力性能,将前述计算的全部模型分为3 组,模型的艇长均相同,对于速度进行无量纲处理,采用雷诺数Re表征流体流动情况,Re定义如下:
式中:Re为雷诺数, ρ为流体密度,v为流体速度,L为艇体长度, µ为动力粘性系数。
采用阻力与排水重量的比值Kr作为阻力性能优劣的判断指标,Kr定义如下:
式中:F为总阻力, ρ为流体密度,V为模型排水体积,g取9.8 m/s2。
对全附体的海豚模型和全附体的鲨鱼模型,即Haitun-1 和Shayu-1 进行对比,Haitun-1 模型的排水重量为12 490.00 N,Shayu-1 的排水量为11 208.16 N,具体对比结果见图10(a);对SUBOFF-1、Haitun-2 和Shayu-2 进行对比,SUBOFF-1 排水重量为6 890.58 N,Haitun-2 模型的排水重量为12 206.00 N, Shayu-2的排水重量为11 004.42 N,具体对比结果见图10(b);对SUBOFF-2、Haitun-3 和Shayu-3 进行对比,SUB OFF-2 的排水重量为6 825.21 N,Haitun-3 模型排水量为12 081.34 N,Shayu-3 排水重量为10 916.32 N,对比结果见图10(c);图10(d)为以SUBOFF-2 为基准Haitun-3 和 Shayu-3 的减阻效果。
以上3 组对比结果都说明了在不同的附体情况下,以单位排水量的阻力为评价标准,海豚模型的阻力特性是最好的。但是通过不同组的对比,发现不同的附体对于结果也有很大的影响,可以看出在只有背鳍的情况下,海豚和鲨鱼的阻力性能十分接近。图10(d)表明基于SUBOFF-2 的阻力,在9 个航速下Haitun-3 的减阻效果都超过了22%,在雷诺数为6.7×107时,即航速为15.432 m/s时,其减阻效果达到了25.15%,而Shayu-3 的减阻效果在14%~18%波动,说明Haitun-3 的减阻效果最好。
3.2 水下无人航行器回转体模型设计
观察海豚的光体模型,此模型是左右对称的,上半部分的弧度要比下半部分的高,将海豚模型在水平面做纵剖面,将得到的纵剖新做180°的回转得到了一个新的模型,记为Haitun-4;再将海豚模型在竖直面做纵剖面,对于剖线的上下2 部分分别做360°的回转,得到了2 个新的模型,分别记为Haitun-5 和Haitun-6,模型见图11。

图11 改进模型示意
3.3 回转体模型计算结果和分析
Haitun-4、Haitun-5 和Haitun-6 共3 个回转体模型的阻力预报结果如表6~8 所示。从表6~8 中可以简单看出,Haitun-5 的阻力最大,其摩擦阻力占总阻力的比值是最小的,Haitun-4 的阻力在速度较小时略高于Haitun-6,在高速时阻力略低于Haitun-6,但是其摩擦阻力占总阻力的比值始终低于Haitun-6。

表6 Haitun-4 阻力计算结果
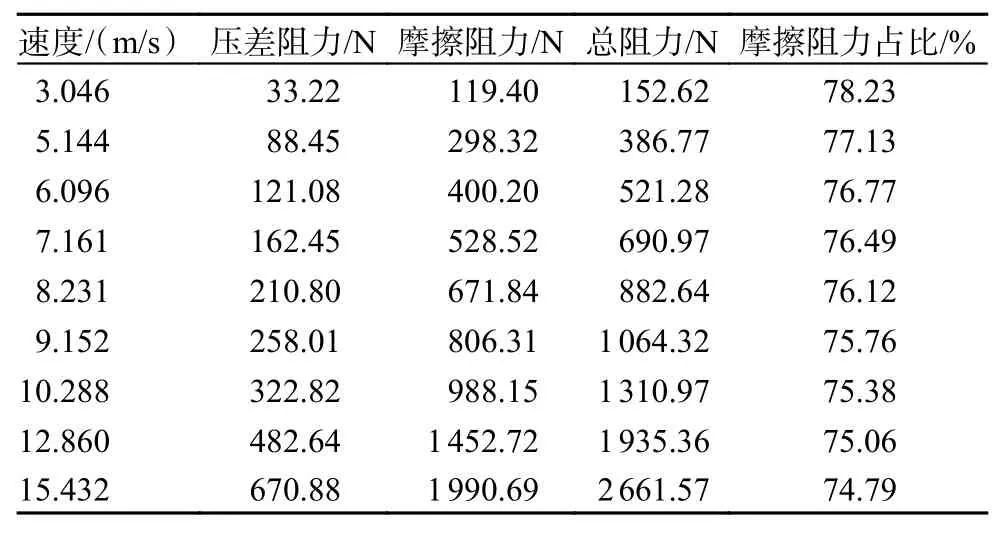
表7 Haitun-5 阻力计算结果

表8 Haitun-6 阻力计算结果
将 Haitun-4、 Haitun-5、 Haitun-6 的阻力和Haitun-3 的结果进行对比,采用Kr值作为评价阻力性能好坏的系数,Haitun-4 的排水重量为11 209.73 N,Haitun-5 的排水重量为17 188.61 N, Haitun-6 的排水重量为11 471.19 N。4 种模型的相关系数的对比见表9 和图12。
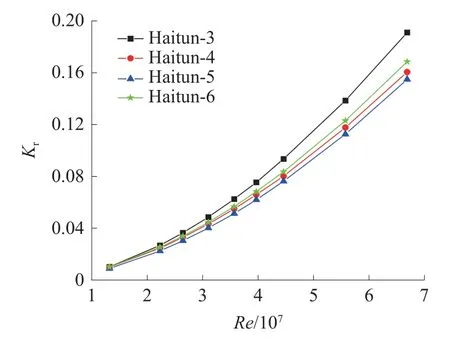
图12 Haitun-3、4、5、6 阻力特性对比

表9 Haitun-3、4、5、6 阻力特性对比
通过比较发现,Haitun-4、Haitun-5 和Haitun-6共3 个回转体模型的阻力均要优于原始模型,其中Haitun-5 模型的阻力特性最好。图13 是基于SUBOFF-2 模型各航速下的3 个优化模型的减阻效果百分比,其中Haitun-5 在9 个航速下的减阻效果均高于33%,在航速为15.432 m/s 时的减阻效果达到了将近40%。
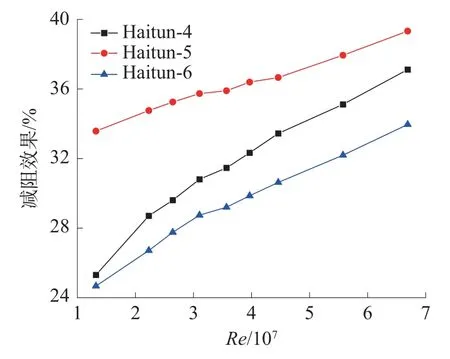
图13 减阻效果
4 结论
对于高速UUV,其阻力性能的优劣对航速和续航能力的提升是至关重要的一方面。本文从仿生角度出发,针对水下无人航行器的减阻需求,模仿海豚和鲨鱼2 种高速游动生物,设计了仿海豚模型和仿鲨鱼模型,运用CFD 技术对其不同附体模型的阻力性能进行了预报和分析,得出如下结论:
1)对全附体SUBOFF 潜器的阻力计算结果,在速度为6.096 m/s 时,阻力计算值与试验值误差相差最大,为1.93%,6 个航速下的平均误差为1.36%,验证了CFD 技术在高速水下航行器水动力性能预报上适用性和准确性。
2)在研究不同水动力外形的阻力数值模拟中,在航速由3.046 m/s 增加到15.432 m/s 时,摩擦阻力占总阻力的比例减小的较为均匀,总体减小了3.42%~5.48%不等。
3)不同的附体情况,摩擦阻力和压差阻力的比值是不同的,附体的存在会使总阻力快速地增加,对于仿生模型,去掉胸鳍引起的阻力变化量随速度相对恒定,而去掉背鳍引起的阻力的变化量会随速度的增加有一定的增加。
4)对于光体模型,Haitun-5 的Kr值最小,其在4 个光体模型中摩擦阻力占总阻力比值也是最大的,说明对于回转体外形,不能一味地追求外形的细长,对于构成回转体的曲线的曲率,或者说曲面的弯曲程度也对阻力有着显著的影响。本文的Haitun-5 可为高速UUV 的外形设计提供参考。
