双臂移乘护理机器人起抱位置与移乘姿态规划*
2024-02-24陈梦倩李顺达杨志强郭士杰
陈梦倩,李顺达,杨志强,陈 力,郭士杰,
(1.河北工业大学 机械工程学院,天津 300132;2.日照职业技术学院 机电工程系,山东 日照 276826;3.复旦大学工程与应用技术研究院,上海 200433)
0 引言
随着人口老龄化加剧,失能/半失能老人数量增加,护理人手不足及护理人员身体负担过重等问题日益凸显。为了缓解护理人员的体力负担,移乘护理机器人的研发成为护理器械领域的一个研究热点[1]。日本理化研究所针对下肢失能老人研发了以RIBA机器人[2]为代表的一系列移乘搬运机器人;美国Vecna 公司设计的移乘搬运机器人BEAR能够把肢体不自由的伤残人抱起来移动[3]。由于双臂具备向多功能发展的潜力,笔者团队也在从事双臂护理机器人研究[4]。本文机器人可以用双臂将被护理人从床上抱起并移乘到轮椅上。然而,由于舒适性、安全性不足等问题,双臂护理机器人尚无法得到实际应用。
被护理人在移乘中的受力大小是影响移乘舒适性最重要的因素[5],肢体局部受力过大会使被护理人产生疼痛感,严重时还可能导致被护理人受伤。移乘中被护理人所受力分为外力和内力,其中外力为机器人双臂克服人体重力而产生的接触力(法向支持力与径向摩擦力),内力则为被护理人为了维持姿态而产生的关节内力、力矩。
为了分析移乘过程中被护理人受力情况,许多学者提出了基于刚体模型的被护理人受力分析方法。Zyada Z 等人[6]将人体简化为一个2 连杆刚体连杆模型,通过此模型只能计算2个人机接触位置的接触力对人体舒适性的影响,因此,舒适性评价函数精度不高,且计算得到的接触力精度过低。Ding M 等人[7~9]将被护理人简化为一个刚性4连杆刚体模型。此方法共考虑了5 个影响因素:膝关节内力矩、髋关节内力矩、颈关节内力矩、人体背部人机接触力及大腿下侧人机接触力。但由于其人体模型采用PCL(Point Cloud Library)[10,11]获取连杆长度,由于PCL的原理是从点云里提取出人体关节位置,该原理极易受衣服褶皱及床上其他物品(例如:枕头、被子)的影响,使得所生成模型的连杆长度存在较大误差,进而影响人体受力预估精度。其次,在基于受力分析对移乘中人体舒适性进行评估时,Ding M等人[7,8]并没有考虑各关节内力对舒适性的影响,使得舒适性评估的准确性较低。
鉴于上述问题,提出一种新的基于人体受力分析的舒适性评价方法。首先,通过视觉识别人体关节位置并结合人体质量分布信息建立人机力学模型;其次,对模型进行受力分析,根据各个力对人体舒适性的影响的程度建立舒适性评价函数;最后,将此评价函数应用于移乘护理机器人起抱位置与移乘姿态规划,并结合本团队自行研制的双臂移乘搬运护理机器人进行实验,以验证本文方法在提升移乘舒适性方面的实用性与有效性。
1 人机力学模型
1.1 4 连杆人体模型
基于连杆人体模型的人体受力计算方法将移乘中复杂的人机接触力、人体关节内力和力矩等效为单一的作用力,可以减少人体受力分析的计算量与计算时间。本文将人体关节位置信息与人体质量分布信息结合,生成简化的4 连杆人体模型。
如图1所示,首先,选用文献[12]的视觉识别方法检测被护理人15个关节的位置信息。此方法使用2 级卷积神经网络来预估人体3D 关节位置,其运算时间和关节预估准确率均满足护理机器人实时性和高准确性的要求,可以从根本上提高人体模型的精度。其次,基于人体解剖学数据的统计法[13],将人体划分为头、躯干、大腿(左右)、小腿(左右)、上臂(左右)、前臂(左右)共10 个部分,求出各部分惯性参数,并将惯性参数与三维人体关节位置结合,生成带有质量信息和位置信息的初级人体模型。由于初级人体模型自由度过多,不利于受力分析,本文将初级的人体模型进行了简化,得到4连杆人体模型。具体简化过程如下:将初级人体模型10个人体部分分为4 个模块,4 个模块均以刚性连杆表示,各连杆之间的铰接点依次为颈关节,左右髋关节中点,左右膝关节中点。记10个人体部分的质心位置Pm=(Pm0,Pm1,…,Pmi,…,Pm9),10 个身体部分的质量为M =(m0,m1,…,mj,… m9),通过式(1)计算出4连杆模型中每个连杆的质量

图1 4 连杆人体模型建立流程
式中 k =(1,2,3,4)为连杆索引,Mk为连杆k的质量,i =(0,1,…,9)为人体部分索引,mi为初级人体模型中部分i的质量,为属于连杆k 的身体部分质量之和。通过式(2)计算出每个连杆质心的位置
式中 Pk为连杆k的质心位置,Pmi为人体初级模型中身体部分i的质心位置,∑mi为属于连杆k的各身体部分的质量之和。
1.2 人机力学模型
为了获取移乘中被护理人的受力信息,本文在4 连杆人体模型的基础上,加入机器人姿态(双臂位置)信息,建立人机力学模型并对此模型进行力学分析,如图2所示。

图2 人机系统力学模型
图2右侧所示为双臂移乘护理机器人移乘中的人机系统力学模型,其中gi,Gi(i∈1,2,…,4)分别为连杆i 的质量及对应的质心位置;G 和g 分别为整个4 连杆人体模型的质心位置和质量;D和E为机器人双臂位置;A,B,C分别为4连杆人体模型的铰接点。机器人双臂和连杆之间的接触定义为刚性接触。(F1,f1)、(F2,f2)为人体与机器人双臂接触位置产生的法向支持力和摩擦力;Mi(i∈1,2,3)分别为铰接点A,B,C 处的力矩(关节内力);θ1,θ2,θ3,θ4分别为大腿、上身、小腿、头部与水平线之间的夹角。为了确保护理过程中被护理人的受力平衡,来自机器人双臂的所有提升力(F1,f1)、(F2,f2)都必须在垂直和水平方向上与人体g(g =g1+g2+g3+g4)的重力平衡;为了使被护理人保持移乘姿态不发生翻转,所有外力产生的转矩必须与关节内力平衡,可得
式中 Si=sin θi,Ci=cos θi。
2 舒适性评价函数
本文对传统的舒适性评价函数[13]进行了改进,将关节内力作为参数加入舒适性评价函数,以提高人体舒适性的计算精度,如图3所示。

图3 舒适性评价函数
改进后的舒适性评价函数考虑了移乘中被护理人受到由机器人提供的支持力与摩擦力、关节内力及关节扭矩对人体舒适性的影响,保证了对被护理人舒适性计算的精度
式中 | |为绝对值函数。w =(w1,w2,…,w10)分别为各力/力矩对舒适性权重参数,通过问卷调查[14]得w =(2,10,2,6,7,5,6,2,6,2)。
改进后的舒适性评价函数如式(5)所示,其中,v 为被护理人舒适性,v 值越小代表舒适性越高。M1,M2,M3分别为颈部关节、髋关节及膝关节处的关节力矩;(F1,F2)、(f1,f2)分别为被护理人在与机器人接触的2 个位置受到的法向支持力与径向摩擦力;Mimax(i∈1,2,3)为在没有任何外力支持时,平衡重力的最大扭矩;FAmax,FBmax,FCmax为在没有任何外力支持时,仅由各部位重力产生的关节内力,结果如式(6)所示
3 起抱位置与移乘姿态规划
如图4所示,初始状态下,A,B,C 分别为颈关节、髋关节和膝关节;D,E 分别为起抱位置在人体模型上的投影;为初始移乘姿态。由于头部与小腿自然下垂的情况下为最舒适状态,这里对头部和小腿姿态不做约束。为点B,D与点B,E之间的直线距离;D,E可分别在线段BC,BA上前后移动以调整起抱位置,其中

图4 起抱位置与移乘姿态规划
为了使被护理人移乘中的舒适性达到最佳,本文定义式(8)为舒适性优化函数:最小化v值,计算θ1,θ2,lBD,lBE,确定人体被抱起时的姿态(θ1,θ2),由于B点坐标已知,由(lBD,lBE)可得起抱位置D,E的坐标
式中 v为人体舒适性,v值越小舒适性越高。
4 舒适性评价实验
分别采用3种方法[15,16]对10名健康受试者(5名男性和5名女性)进行了如图5所示的移乘实验,并对其移乘中所受的接触力及竖脊肌的肌电(EMG)信号进行采集,力信号与EMG信号采集设备如图6所示。其中,图6左侧为贴在机器人双臂上的压力传感器,用于测量移乘中人机接触位置的接触力,其模拟输出值为0~255 raw,输出单元为32×32;图6右侧为贴在受试者竖脊肌处的EMG 传感器,用于测量移乘中受试者竖脊肌的EMG信号,其模拟输出范围为-5~5 V。实验结果如图7~图9所示。

图5 实验过程

图6 实验设备
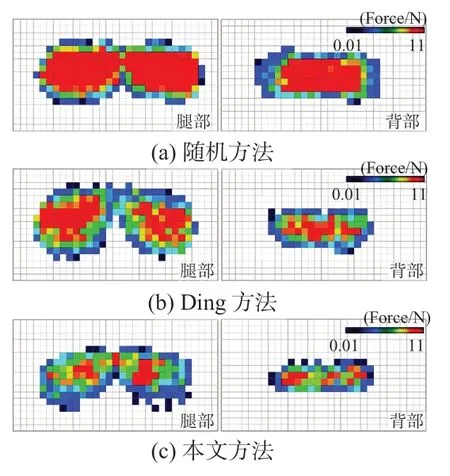
图7 不同方法下受试者背部与腿部受力大小及分布
图7所示为其中1组受试者在3种不同方法下的背部与腿部受接触力分布情况。为了方便描述与对比,记压力传感器每个单元的压力值为fij(i∈1,2,…,32;j∈1,2,…,32),通过式(9)将压力传感器每个接触区域的单元压力值相加除以接触面积计算每个接触区域的平均压力(average pressure,AP)。由于AP反映了接触区域处的整体受力,直接影响移乘的舒适性[17~19],本文将AP作为衡量舒适性指标进行对比,结果如图8所示。AP计算公式如下
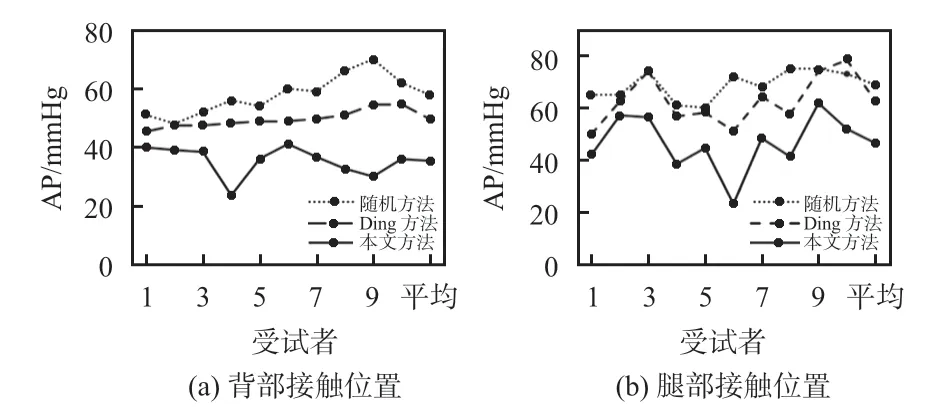
图8 机器人与受试者接触位置AP比较
图8所示分别为3 种方法下被护理人背部、腿部与机器人接触区域的AP,由图9 可知,随机方法得到的受试者移乘中背部和腿部接触位置的AP 是3 个方法中最高的,其AP均值分别达到了58 mmHg 与69 mmHg。这是因为,随机指定的起抱位置与移乘姿态没有经过科学的分析被护理人移乘中的受力情况,无法控制被护理人移乘中所受接触力大小;Ding M等人[7,8]的方法运用人体模型对移乘中的被护理人受力情况进行了预估,并使用舒适性优化函数对起抱位置及移乘姿态的受力进行了优化,得到的AP 较随机方法有一定下降,但由于人体模型精度偏低,通过人体模型解出的人体受力信息与真实的人体受力之间误差过大,这导致最后求出的起抱位置与姿态与真正的舒适性最优的起抱位置与移乘姿态之间存在偏差,无法保证移乘的舒适性。本文方法得到的背部和腿部AP 最低,分别为35 mmHg和47 mmHg。这主要是因为本文运用深度学习方法提取人体关节位置,采用受试者实际姿态的质量分布计算连杆质心位置,克服了人体模型精度低的问题。

图9 AREMG值对比
肌肉的基本行为是缩短,缩短会产生关节内力用于平衡外力及外力产生的力矩使移乘中的被护理人保持自身平衡。为了方便对比,首先对采集到的EMG 信号进行整流,得到整流EMG(rectified EMG,REMG)信号,再选取一段时间长度T的信号,N个点,点和点之间的时间差为Δt,该段信号为Data[i],由式(10)计算得平均REMG(average REMG,AREMG)值。因为AREMG 值与时间长短无关,能够很大程度体现出sEMG 的支配输出[20],本文选择AREMG作为竖脊肌收缩大小的衡量标准将3 个方法进行对比,结果如图9所示,公式如下
由图9可知,基于经验的随机方法因为没有进行受力分析,无法避免移乘中关节内力过大的问题,导致移乘中受试者竖脊肌收缩在3个方法中最大,AREMG值达到了19.7 μA,无法保证移乘的舒适性[8];文献[8]的方法通过舒适性评价函数规划起抱位置与移乘姿态对被护理人的关节扭矩进行了优化,使得其竖脊肌收缩明显减小,AREMG值较随机方法减小了4.8 μA。但由于其舒适性评价函数没有考虑关节内力对人体舒适性的影响,导致此方法仍然无法将被护理人的肌肉收缩进一步减小,移乘舒适性仍然不足;本文方法得到的AREMG值最小,仅11 μA,较随机方法减小了44.2%,这是因为本文采用的舒适性评价函数在文献[8]的基础上加入了关节内力对人体舒适性的影响因素,在规划起抱位置与移乘姿态时对各关节扭矩及内力同时按权重同时优化,最大可能地减小了关节周围肌肉收缩,提高移乘的舒适性。
5 结论
本文针对双臂移乘护理机器人移乘过程中被护理人舒适性低的问题,提出一种基于受力分析的舒适性评价方法,并将其应用到机器人起抱位置与移乘姿态规划中。实验结果表明:本文方法规划的起抱位置与移乘姿态能有效减小被护理人移乘中所受接触力和关节内力,提高移乘的舒适性。相较于现有方法,被护理人背部接触位置的AP 值减小了14 mmHg,腿部减小了16 mmHg,腰部竖脊肌的AREMG下降了约4 μA。这表明本文方法有效地提高了被护理人移乘中的舒适性,对今后移乘护理机器人的舒适性提升发展有一定的推动作用。下一步研究中,将结合移乘护理机器人的工作过程,将这种舒适性评价函数用于抱起和放下2个阶段的机器人双臂的轨迹规划。
