基于瞬变电磁阵列的地下金属定位系统设计*
2024-02-24康良伟边瑞卿董浩森张永杰
康良伟,边瑞卿,董浩森,张永杰,李 凯
(中北大学 信息与通信工程学院,山西 太原 030051)
0 引言
在城市现代化建设中,浅层金属探测[1]、市政管道检测[2]、城市地下遗留障碍物[3]检测等问题急需解决,针对以上需求,需要一种对浅层[3]地下金属目标进行定位的方法。电磁探测技术[4]由于其具有非接触式、设备便携[5]等特点,长期以来一直是地下金属探测领域的研究热点。电磁探测技术主要分为瞬变电磁(transient electromagnetic,TEM)法和频域电磁(frequency domain electromagnetic,FEM)法[6],其中,TEM 法具有施工效率高、探测深度大的优点[7],有巨大发展前景[8]。
在基于电磁感应原理的地下金属目标定位领域,学者主要对定位算法和传感器结构进行研究。Tao Y等人[9]采用LM(Levenberg-Marquardt)算法基于磁梯度张量模型对地下金属目标进行反演,从感应信号中获得地下金属的材料特性并进行识别,实验装置为8 个圆周排列的接收线圈构成的传感器阵列;Zheng Y X 等人[10]通过变分模态分解(variational mode decomposition,VMD)算法与LM算法融合根据测磁数据得出目标的位置、磁矩等信息,结果表明该方法定位近地表目标的误差在10 cm 以内,探测传感器由2个铯光泵磁力计和1个磁通门磁力计组成。上述方法均采用复杂度较高的定位算法,需要待测数据量较多,且探测目标形状单一,探测效率较低。
为满足复杂环境的多形状地下金属目标定位需求,本文设计了基于TEM 阵列式传感器的地下金属目标定位系统。建立基于TEM线圈阵列传感器的目标定位模型,根据传感器阵列接收信号间的差异性对地下金属目标进行定位,最后通过模拟实验验证了该定位方法的有效性。
1 TEM传感器工作原理
TEM探测结构及工作流程:信号产生模块生成双极性梯形电流i1(t),将其通入到传感器的发射线圈中,向地下发射一次磁场B1(t),在梯形波关断瞬间一次磁场B1(t)快速衰减,会激励地下金属物体产生涡流i2(t),该涡流会逐渐衰减并在地质体中产生衰减的二次感应磁场B2(t);通过传感器的接收线圈将感应磁场的变化值转换为感应电动势信号,然后通过信号接收模块获取上述过程中的感应电动势衰减曲线v(t),最后通过信号处理模块对感应电动势曲线进行分析,得到地下金属目标的电导率、埋深等信息。其中采集到的感应电动势由一次磁场引起的干扰信号v1(t)和二次磁场引起的有效信号v2(t)共同构成。
TEM传感器的工作原理如下
式中 v(t)为接收线圈总感应电动势,r0为收发线圈间距,r2为地下目标与接收线圈间距,v1(t)为一次场感应电动势,v2(t)为二次场感应电动势,B1(t,r0)为一次发射磁场在接收线圈处的磁感应强度,B2(t,r2)为二次散射磁场在接收线圈处的磁感应强度,S为接收线圈的有效面积。
TEM传感器探测结构可近似为单磁偶极子模型[11],其中B1(r1)和B2(r2)如下
式中 I0为发射电流幅值,l1为发射线圈线元,r1为地下目标与发射线圈间距,m为金属目标的偶极矩,G(r2)为格林函数[12],N为金属目标的磁极化率张量矩阵,Nxx,Nyy,Nzz为主极化元素,与目标的形状、大小、取向、磁导率、电导率有关。
2 系统设计
2.1 系统结构设计
如图1所示,4个相同的接收线圈位于同一平面上,在发射线圈周围等间距,并且与发射线圈之间有一定的垂直距离,从而可以从4 个不同的方向获得地下目标的感应电动势信号。采用上述传感器装置进行探测时,由于发射线圈和接收线圈距离较近,发射线圈和接收线圈之间的互感较大,使得衰减曲线中的干扰信号较大,对地下目标的探测影响较为严重,采用偏心自补偿结构对传感器[13]的结构进行优化。图1为传感器的实物和电路结构示意。
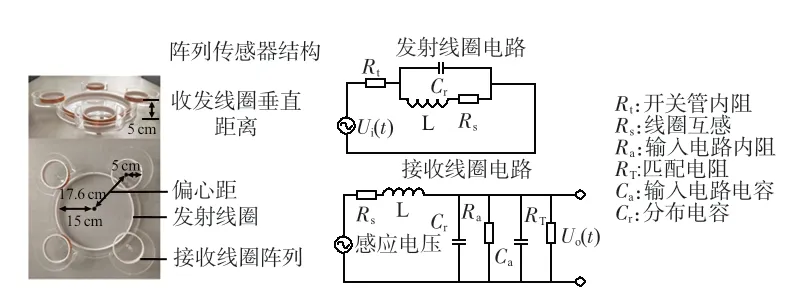
图1 系统设计
2.2 传感器系统目标定位模型
当传感器系统位置固定时,将探测装置与目标之间的响应模型分为4 类:目标水平位置改变、目标垂直埋深改变、目标形状改变、目标体积大小改变。
假设4个接收线圈接收到的感应电动势分别为v1(t),v2(t),v3(t),v4(t);其中,v1(t)=v1i(t)+v2i(t)。v1i(t)和v2i(t)分别为接收线圈i 接收到的一次磁场和二次磁场感应电动势。由式(1)可知,在探测装置位置固定时,r0不变,因此v1i(t)大小不变。
2.2.1 目标水平位置改变
探测模型如图2(a)所示。当水平位置改变时,r1和r2i均发生改变,接收线圈感应电动势v2i(t)如下
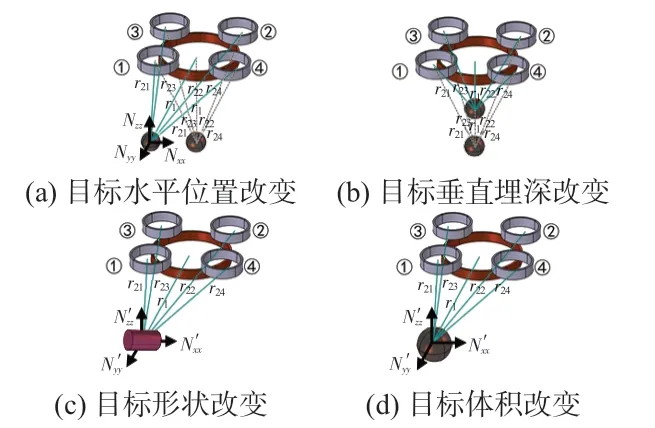
图2 TEM探测响应模型
如图3(a)所示,金属目标A,B与接收线圈1、2中心均位于X-Z平面。其中,A点位于发射线圈中心正下方,B点位于发射线圈1 中心正下方。对于接收线圈1,当金属目标由A点沿路径X 轴负方向移动时,r1逐渐增大,r21先减小后增大,在B点时r21最小。因此地下金属目标在A,B之间时,接收线圈1的感应电动势信号与相关,在B点沿X轴负方向移动时,感应电动势信号逐渐降低。
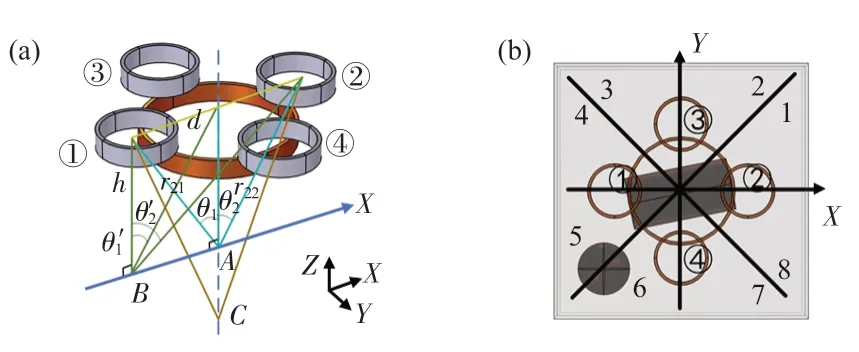
图3 目标水平位置及埋深变化示意
在同一时刻,4个接收线圈的感应电动势V如下
当金属目标位于A点时,r2i(i =1,2,3,4)相等,此时接收线圈i接收到感应电动势信号相等;在X-Y平面时,当金属目标位于X <0,Y >0的空间时
此时,接收线圈阵列的感应电动势为
因此通过接收线圈阵列采集到感应电动势的大小差异即可判断金属目标的水平方位。按照接收线圈的位置将发射线圈平面划为8个区域,如图3(b)所示。根据各个接收线圈接收到感应电动势的大小,可判断地下目标水平位置。
2.2.2 目标垂直埋深改变
探测模型如图2(b)所示。如图3(a)所示,C 点位于A点正下方,当埋深增加时,r1和r2i均增大,由上述公式可知,此时B1,B2均增大,接收线圈阵列的感应电动势v2i(t)均减小。
2.2.3 目标形状及体积大小改变
探测模型如图2(c)、(d)所示。当目标参数改变时,目标的磁极化张量N发生变化,二次散射磁场在接收线圈处的磁感应强度B2(r2)发生改变,使得接收线圈阵列电动势v2i(t)发生变化,如下式所示
式中 N为磁极化率张量矩阵,q(t)为与目标与收发线圈距离有关的响应函数。基于上述理论,目标参数及位置变化时,传感器接收线圈阵列的感应电动势会发生改变,因此本文采用基于接收线圈感应电动势差异的方法对地下目标进行定位。
3 目标定位方法
目标定位流程如图4 所示,传感器首先获取待测环境的空场信号和待测目标的标签信号;然后,采集待测目标的数据,结合空场信号定位地下目标的水平位置;最后,结合待测目标的标签信号定位待测目标的埋深。

图4 目标定位流程
1)预处理过程:为了消除环境噪声的影响,首先将传感器系统放置在待测目标的场地上,采集环境空场的响应信号;然后,根据待测目标的材料等参数,选择已知的金属标签模型,放置在发射线圈正下方,改变埋深,进行多次实验。将传感器获得的感应电动势信号作为标签信号,根据指数衰减规律拟合目标埋深与感应电动势之间的响应曲线。
2)目标水平位置定位过程:通过传感器系统对待测目标进行检测,得到接收线圈阵列采集到的感应电动势衰减曲线。选取衰减曲线后期同一时刻的感应电动势值进行比较,得到目标的水平方位。
3)目标埋深测量过程:在获得目标的水平方向后,将传感器系统移动至待测目标上方。通过再次测量,得到了接收线圈的感应电动势衰减曲线。选取衰减曲线后期同时刻的感应电动势值,代入上述埋深与感应电动势拟合曲线,得到待测目标的埋深。
4 实验验证
根据实际探测环境,搭建1 m×1 m×0.5 m的层状介质模拟装置。该实验装置由多个不同大小的透明亚克力板组合而成,由于亚克力材料在电磁传播过程中影响较小,因此采用TEM法进行地下目标探测实验过程中,可忽略其产生的影响。
实验采用的目标分别为半径5 cm的球体、边长5 cm的立方体和半径为5 cm,长度10 cm的圆柱体,其材料均为相同铁质金属。发射线圈激励电流采用信号发生器产生的双极性梯形波,经过功率放大器后其发射电流为1.5 A。激励信号波形图5(a)所示,图5(b)为接收线圈感应电动势衰减曲线,由于激励信号经过功率放大器后下降沿产生失真,故采用M1处上升沿衰减曲线进行分析。

图5 发射信号与接收信号波形
4.1 水平位置定位验证
测试目标处于同一埋深下,接收线圈阵列的定位功能。首先,在未放置目标时,测量实验平台的背景磁场,1~4 接收线圈的感应电动势衰减曲线如图6所示。
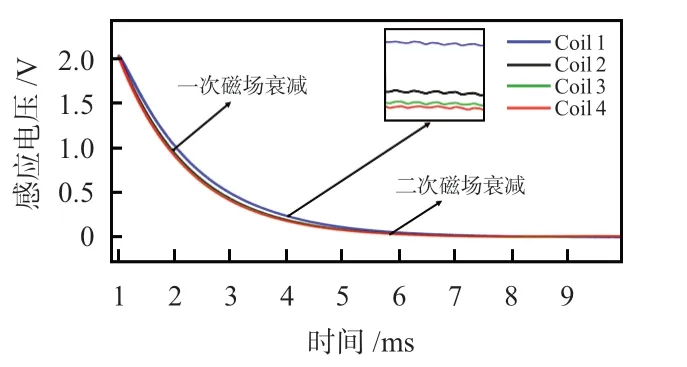
图6 背景感应电压信号
分别将球体置于发射线圈下方埋深0.25 m 处不同水平位置进行探测,图7(a)为接收线圈阵列感应电动势与背景值的差值曲线,可看出目标水平位置差异。接着分别将球体、立方体、圆柱体目标置于发射线圈正下方埋深0.25 m处进行探测,图7(b)为接收线圈阵列感应电动势与背景值的差值曲线。
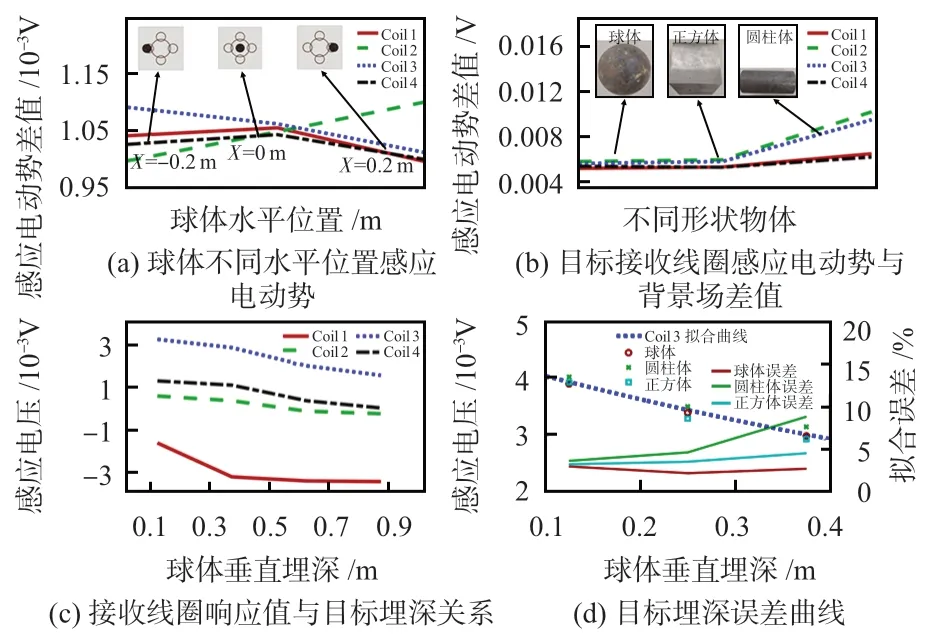
图7 TEM阵列传感器定位结果
4.2 垂直埋深验证
将球体置于发射线圈正下方,等间隔改变埋深至0.05~0.375 m,1~4接收线圈测量结果如图7(c)所示。可以看出,随着埋深的增加,接收线圈感应电动势信号逐渐降低。对上述感应电动势曲线进行拟合,通过实测值估算出埋深。图7(d)为不同形状目标分别在发射线圈正下方0.125,0.25,0.375 m处时,接收线圈3 的感应电动势与拟合曲线的误差图。由图7(d)可示,随着埋深增加,在深度为0.5 m以内时,球体、圆柱体、正方体的埋深误差分别稳定在2.4%,7.9%,5.9%左右。
5 结论
采用阵列线圈传感器结构,在层状介质模拟装置下进行试验,3种地下目标球体、立方体以及圆柱体能够准确判别水平方位,其垂直埋深误差在8%以下。结果表明,该系统可满足设计的基本需求。
