融合DenseNet和注意力机制的永磁定位方法*
2024-02-24郭鹏飞戴厚德杨千慧姚瀚晨黄巧园
郭鹏飞,戴厚德,杨千慧,姚瀚晨,黄巧园
(1.中国科学院福建物质结构研究所,福建 福州 350002;2.中国科学院大学,北京 100049;3.厦门大学 信息学院,福建 厦门 361005)
0 引言
永磁定位技术是一种通过磁传感器测量磁铁等永磁体产生的磁场来对永磁体进行定位的技术。与其他定位技术(激光雷达定位[1]、视觉定位[2]、二维码定位[3]、惯导定位[4])相比,永磁定位具有精度高、灵敏性好、不受视线遮挡、耐磨损和成本较低等优点,在运动跟踪、机器人定位导航和医疗无线胶囊内窥镜等领域中成为新的研究热点。
目前较为成熟的永磁定位方案采用圆柱形磁铁作为磁源,并使用磁偶极子模型对磁场进行建模;大多数研究采用LM(Levenberg-Marquardt)最优化算法根据建模后的信息求解磁铁的位置和姿态。然而,LM 算法需要初始估计值才能迭代寻找最优解,如果初始估计值与真值差距过大,算法容易陷入局部最优解以及降低计算速率。文献[5]提出使用粒子群优化(particle swarm optimization,PSO)算法对初始位姿进行估计;然而,新的代价函数增加了定位系统的计算复杂度,并进一步降低了系统的计算速率。与最优化算法相比,解析方法计算更快、结果更可靠。文献[6]提出基于简化磁偶极子模型的解析方法,可以推导出磁铁二维位置信息的解析表达式,但该方法无法获取磁铁的五维位姿信息,应用场景受限。文献[7]基于机器学习方法,使用反向传播(back propagation,BP)神经网络提升了定位系统的跟踪范围,但所用数据集固定了磁铁姿态,在近距离时定位精度有限。
为了解决永磁定位算法于依赖初始值、计算耗时受限的问题,本文提出使用深度神经网络对磁性目标进行定位,通过基于磁偶极子模型模型[5]的先验知识推导约束条件并构造惩罚函数,在密集卷积网络(dense convolutional network,DenseNet)[8]的基础上加入注意力机制的挤压和激励模块(squeeze and excitation block,SE Block)[9]以动态调整通道的权重,提出一种高精度、高计算速率的永磁定位方法。
1 基于磁偶极子模型的先验约束条件
本文研究方法采用轴向充磁的圆柱形磁铁以及组成4×4阵列的三轴磁传感器,当磁铁到磁传感器之间的距离远大于自身尺寸时,磁偶极子模型对磁铁产生的磁场有很好的近似模拟效果[5],如图1。

图1 基于永磁传感阵列的磁偶极子模型
1.1 磁偶极子模型
如图1所示,在全局坐标系下,磁铁的中心位置为(a,b,c),磁铁的方向矢量为H0=(m,n,p)T,第l 个磁传感器的位置为(xl,yl,zl),Fl表示从(a,b,c)到(xl,yl,zl)的方向矢量,则第l个磁传感器感应到磁铁产生的磁场强度Bl可以表示为
式中 BT为与磁铁性质有关的常数,N 为磁传感器的总数,单位坐标矢量i,j,k 分别对应于x,y,z 轴,Rl=为Fl的长度。
对式(1)求逆运算,并代入已知的参数和常数,则磁铁位姿变量(a,b,c,xl,yl,zl)关于磁场强度变量Bl的函数关系可以表示为
磁偶极子模型为多元高次方程,因此难以使用解析法对式(1)求逆,使用神经网络可对式(2)的非线性关系进行拟合,从而将磁偶极子模型的最优化问题转化为回归问题。
1.2 基于先验知识的约束条件
当圆柱形磁铁沿S-N轴向方向旋转时,磁场强度不会发生改变,因此无法计算磁铁沿轴向方向的旋转角[5]。H0 =(m,n,p)T为磁铁姿态的三维方向矢量,存在固定的约束条件
式中 m,n,p的取值范围为[-1,1]。
将4×4磁传感阵列上方的跟踪域定义为LM×WM×HM,结合边界约束以及式(3)可以构造以下约束条件
式中 Oa,Ob,Oc分别为磁铁的位置向量在x,y,z 坐标轴上的分量。
利用惩罚函数法,可对约束条件求最优解
式中 σi为惩罚因子且满足σi>0。
2 基于DenseNet的磁定位方法
2.1 DenseNet
深层神经网络对数据和模型的拟合效果更好,但往往面临梯度消失问题。为了应对上述挑战,文献[8]提出DenseNet,将每一层的特征映射作为输入连接到后续其他层中,以对更深层的网络进行更有效和更准确的训练。
鉴于DenseNet在图像分类等领域的优秀表现,本文使用DenseNet作为基础模型,同时在其基础上添加基于通道注意力机制的SE Block,最终网络的模型结构如图2 所示,包含3个密集块和2个过渡层和3个通道注意力模块。
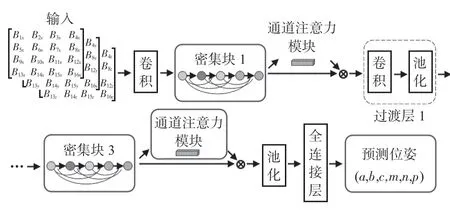
图2 加入SE Block的DenseNet
每个密集块由连续的批标准化(batch normalization,BN)、修正线性单元(rectified linear unit,ReLU)和3×3 的卷积层组成。假设初始卷积层的通道数为m,每一层的特征增长率为k,则第L层的特征通道数为m +(l-1)k。通过这种方式,可以将每一层的特征映射作为一种特征信息补充,拼接到后续层的特征中,克服在深层网络不断卷积过程中浅层信息的丢失。
每个过渡层由1×1的卷积层和2×2的平均池化层组成,用来连接每个密集块,加速网络的训练。
2.2 基于通道注意力机制的SE Block
当磁铁与磁传感器距离较远时,传感器测量的磁感应强度较小,对定位结果的影响相对较低。为了动态调整各传感器数据的权重,提升网络预测的稳定性与减少整体方差,本文采用SE Block,在DenseNet的基础上进一步添加了通道注意力机制。该机制在训练过程中动态评估网络各个通道的重要程度并进行加权,从而抑制非重要特征通道,提升对重要特征的关注度,使得DenseNet能够在众多特征拼接中提取关键信息,增加预测结果的准确性与稳定性。
注意力机制结构如图3所示,对于输入X∈RH×W×C,经由网络特征提取层得到的特征U∈RH×W×C。首先进行全局池化操作,得到1×1×C 的通道特征分布,然后通过全连接(fully connected,FC)层应用Sigmoid 自动学习得到每个通道特征的权重,最后加权输出,作为后续网络的输入。

图3 SE Block结构
3 实验与结果分析
3.1 永磁传感阵列
如图4 所示,本文研究方法采用直径10 mm,高度10 mm圆柱形铷铁硼(Nd-Fe-B)磁体作为磁源;并采用自主设计的4×4永磁传感阵列采集磁感应强度信息。永磁传感阵列包括16只三轴磁传感器、1 块单片机和标定板,其中,三轴磁传感器型号为LIS3MDL(STMicroelectronics,瑞士),单片机型号为STM32H743VIH6(STMicroelectronics,瑞士)。

图4 永磁传感阵列
通过调节标定板的高度和移动磁铁的位置,采集了在48~118 mm 高度范围内的5 312 个样本数据(高度间隔10 mm,每个高度采集664个样本数据),跟踪域LM×WM×HM定义为180 mm×180 mm×118 mm。
对采样得到的数据做去地磁干扰、消除非正交误差和零偏移误差等预处理[5,10],则网络的输入数据为来自16 只磁传感器的48个通道的磁感应强度数据,输出数据为磁铁在标定板对应位置的六维位姿向量。
3.2 网络训练
实验硬件配置为Intel®CoreTMi7—7700HQ处理器,8 GB内存,英伟达显卡GTX1050Ti。
磁感应强度数据经过转置后尺寸变为(3,4,4),为了保留边缘信息,对输入数据的边缘进行填充0 的处理(padding =2)使输入数据尺寸变为(3,8,8)。
密集块中的初始卷积层的通道数为m设置为24,每一层的特征增长率k 设置为12,则第L 层的特征通道数为12(L +1)。
实验中最大迭代数为1 000,初始学习率设置为0.001,且随迭代次数增加而减少。惩罚因子(σ1,σ2,σ3,)设置为(0.001,0.001,0.001),优化器选用Adam。
根据式(5),网络的损失函数可以定义为
式中 Ypre为网络的预测值,Ytrue对应磁铁的真实位姿,Emse为MSE均方误差函数。
3.3 实验结果分析
3.3.1 计算速率与稳定性
表1显示了不同初始估计值对LM 算法收敛到真实值所需时间的影响,磁铁的真实位姿为(0,0,78 mm,0,0,1)。

表1 初始位置对LM算法计算时间的影响
当初始估计值与真实值的差值越大,LM 算法完成收敛所需的计算时间将会大幅增加;显然,无需初始估计值的卷积神经网络永磁定位方法计算的鲁棒性和稳定性更佳。
表2比较了PSO-LM算法与基于DenseNet的永磁定位方法平均计算耗时。

表2 平均计算耗时对比
基于DenseNet的永磁定位方法将计算时间从98 ms减少至1.6 ms,大幅度提高了计算速率。
3.3.2 定位精度
为了评估定位算法的性能和精度,位置误差Ep与方向误差Eo的误差函数被定义为
式中(a,b,c,m,n,p)e为卷积神经网络的预测值,(a,b,c,m,n,p)t为磁铁位姿的真值,方向误差也可以用角度表示,计算公式为2arcsin(Eo/2)。
为了验证基于先验知识的约束条件和通道注意力机制的SE Block对模型预测精度的影响,表3 对比了不同条件下DenseNet的定位精度。

表3 不同算法的定位精度对比
实验结果表明,DenseNet对模型和数据的拟合效果不够理想,定位结果的均值和方差较大。经过添加基于先验知识的约束条件以及融合注意力机制,DenseNet的定位精度得到提升、模型拟合效果变佳,定位精度达到(1.79 ±1.05)mm和1.12° ±0.53°,足以满足大部分应用场景的精度需求。
4 结论
永磁定位具有毫米级的定位精度,且拥有计算频率快、不受视线遮挡等优点。目前主流的永磁定位方法基于磁偶极子模型以及LM 算法,计算速率有限且过于依赖初始估计值。
本文利用基于磁偶极子模型的先验知识构造惩罚函数,提出一种融合DenseNet[8]和SE Block[9]的永磁定位方法。在保持较高精度的同时大幅减少了定位单个磁铁的平均计算耗时,在运动速率更高、对计算速率要求更高的场景中有更好的应用前景。与此同时,深度神经网络的计算带来了额外计算资源的要求,相对提高了永磁定位系统的成本。
另外,基于标定板采集数据的方式较为繁琐,在之后的实验中可使用Vicon 光学定位系统辅助采集数据。同时,网络可以加入在线学习功能,增加其对于新数据的拟合性能以及抗噪能力。
