基于圆曲线最小通过宽度的无轨电车轨迹跟随点选择
2024-02-23石俊杰王铁成季元进黄有培
石俊杰 崔 涛 王铁成 徐 练 季元进 黄有培
(1. 中车唐山机车车辆有限公司, 063035, 唐山;2. 同济大学铁道与城市轨道交通研究院, 201804, 上海)
虚拟轨道列车是一种新型城市轨道交通系统,具有公共路权、灵活编组、智能循迹等特点。与传统道路公交相比,多模块虚拟轨道列车大幅度增加了客运量并降低了能源消耗。与有轨电车相比,虚拟轨道列车无需轨道,可充分利用现有道路基础设施,因此可降低建设成本[1]。
目前,对于虚拟轨道列车的轨迹跟随控制研究,均为通过控制车辆后轴跟随点对前车跟随点的轨迹跟随,以实现减小车辆曲线通过时的通过宽度[2-5],并没有考虑车辆跟随点选择方式,一般都默认车辆车轴所在点或者车辆铰接点所在位置为跟随点。文献[6]讨论选择不同跟随点时车辆的轨迹偏差表达式,对比分析头车前轴、头车后轴、前轴与后轴之间、铰接点4种不同跟踪点方案。研究表明:当跟随点在前轴中心到后轴中心之间时,列车轨迹偏差相同;当跟随点为铰接点时,由于铰接点在头车后轴中心点之后,因此列车轨迹偏差变大。本文基于某型三模块六轴虚拟轨道列车,分析车辆曲线通过的最小通过宽度对轨迹跟随点选择的影响,为跟随点位置选择提供了依据。
1 车辆通过宽度
传统列车转弯通过宽度是指牵引车最外端一点到转向中心的距离与最后一节挂车最内侧外沿到转向中心最短距离之差,因此主要取决于牵引车和挂车的结构形式与几何尺寸。转弯通过宽度是列车机动性的重要指标之一,而对于三节编组六轴无轨电车的全轴转向形式,可按照单车情况考虑。
1.1 圆曲线
以列车中车体最长的车辆为例进行分析。如图1所示,根据几何分析容易证明,当车辆相对于线路坐标系的摇头角为0°时,车体的内、外偏距最小,车辆的通过宽度最小。按照几何关系可以得到目标轨迹左右侧偏差量和车辆通过宽度的解析表达式。考虑到实际运营情况,根据车体左右偏差量来合理布置线路中心标志(如车道线、磁钉),可以使得车辆通过宽度得以有效利用。分情况进行讨论。

注:w—车体宽度; L—车体长度; ξ—循迹控制点到车体端部占车辆长度的比值; R—曲线半径。
1) 当期待线路标志布置在线路中心,且希望车辆轨迹的左右侧偏差量保持一致时。依据图1几何关系可知,轨迹左右侧偏差量为dLR=lC′E-lG′F(lC′E为车辆最外端一点到线路中心线距离,lG′F为车辆最内沿到线路中心线距离),即:

(1)
为保证轨迹左右侧偏差量相等,令dLR=0,得到:
(2)
参考无轨电车车辆参数:w为2.5 m,L为6.66 m,R选择范围为15~55 m;车体长度变化范围为5.5~7.5 m,车体宽度变化范围为2.0~3.0 m。计算不同圆曲线半径下L、w与ξ的关系,结果如图2所示。左右侧偏差量相等条件下,L、w的变化对ξ的影响较小;随着曲线半径的增大ξ逐渐减小,但ξ都在0.16左右。

图2 不同圆曲线半径下车辆L、w与ξ的关系
2) 当需要尽可能减小车辆通过所占面积时,依据图1几何关系可知,通道宽度Wtd的表达式为:

(3)
式中:

为保证车辆通过宽度最小,令∂Wtd/∂ξ=0,得到ξ=0.5。
参考无轨电车车辆参数,不同ξ与Wtd的关系如图3所示。由图3可见,按照轨迹左右偏差量最小得到的Wtd并非最小。

图3 不同ξ与Wtd的关系(R=15 m)
1.2 过渡曲线
对于车辆通过过渡曲线情况,给定一个单参数曲线簇:
F(x,y,s)=0
(4)
式中:
x、y——横、纵坐标值;
s——轨道参数;
F——连续可微函数。
曲线簇的包络线是跟该曲线族的每条线都有至少一点相切的一条曲线。
依据包络线的定义,车体的包络线包含在以下两个方程中:
(5)
式中:
i——车体所在位置;

车辆轮廓扫过的边界是车辆端点轨迹、车辆包络线和车体外形这三部分的组合,如图4所示。外侧粗线分别为车体尾部顶点形成的轮廓、车体前端顶点形成的轮廓及车体左侧墙和右侧墙形成的包络线,虚线为车体的外形。车辆通过过渡曲线扫过的边界可表示为:

注:state为车辆运行状态。
Fboundary(si)=max(Fvertex,Fenvelope(si),Fcarbody(si))
(6)
式中:
Fboundary——车辆动态边界;
Fvertex——车辆顶点形成的轮廓;
Fcarbody——车辆前开始和终点车体外形;
Fenvelope——车辆的包络线。
车辆通过宽度是车辆轮廓移动过程中扫过范围边缘和轨道前进方向之间的法向距离,此时将公式(6)所得到的轮廓边界按照轨道方向展开,求解车辆通过宽度,如图5所示。车辆通过宽度Wtg表达式为:

图5 车辆通过过渡曲线的通道宽度
(7)
式中:
di——轨迹右侧偏移量;

2 列车几何通过模型
三模块无轨电车的结构示意图如图6所示,其中,J1、J2为车体间铰接点,J0、J3表示头车和尾车的虚拟循迹点(与铰接点J1、J2以头车和尾车的车体中心相对称),P0—P3为确保车体左右侧的偏差量相等条件下的比例系数对应(此处控制点到车体端部长度占车辆长度的比值取为0.16)的跟随点。

注:φj—车体j的航向角,j=1,2,3。
目标轨迹方程为:
(8)
式中:
l——车辆在目标轨迹路径上运行距离;
λtarget(l)——目标轨迹。
车辆的运行状态为:
qk=[xikyikφ1kφ2kφ3k]T
(9)
式中:
qk——k时刻车辆运行状态;
(xik,yik)——k时刻对应车体在i位置的横坐标及纵坐标值;
φ1k、φ2k、φ3k——k时刻第1、第2和第3节车的航向角,逆时针为正。
依据几何关系求解列车位置过程步骤为:
1) 按照车辆运行速度,得到第一跟随点对应的坐标(xP0(sk),yP0(sk));
2) 以第二控制点P1与第一控制点的距离为半径,以第一控制点为圆点与目标轨迹的交点确定第二控制点坐标(xP1(sk),yP1(sk));
3) 依据第一控制点与第二控制点的坐标得到车辆的偏航角φ1k=arctan((yP0k-yP1k)/(xP0k-xP1k)),进而求得铰接点坐标(xJ1,yJ1);
4) 重复步骤2)、步骤3),得到车体φ2k和φ3k,以及P2、J2、P3、J3点的坐标。
3 仿真分析
依据表1无轨电车车辆几何参数,参考列车几何模型,设置4种典型循迹控制跟随点工况:
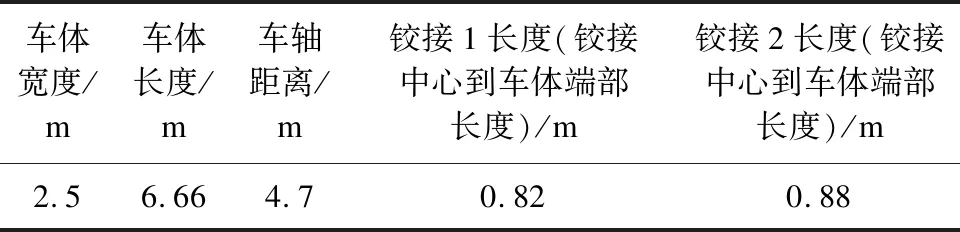
表1 无轨电车车辆几何参数
工况1:跟随点选为ξ=0.16;
工况2:跟随点选为第1节车的车体端点+铰接点;
工况3:跟随点选为车体端点:
工况4:跟随点选为铰接点+头车虚拟铰接点(图6中J0点)。
参照列车几何模型,4种工况下列车由直线进入R=20 m圆曲线的通过宽度Wtg的仿真结果如图7所示。表2给出R分别为20 m、40 m、60 m下通过宽度的稳态值和最大值计算结果。依据图7及表2可知,当跟随点对称且位于车辆的铰接点处(如工况4),车辆的最大通过宽度最小。当按照工况1和工况3设置跟随点时,车辆稳态通过宽度最小。

表2 车辆通过不同曲线半径圆曲线通过宽度计算结果

a) 工况1
4 结语
本文推导了稳态圆曲线车辆的轨迹左右侧的偏差量和通过宽度计算公式,仿真计算结果表明:随着曲线半径的增大,最优循迹跟随点到车体端部位置占车辆长度的比值逐渐减小,但比值都在0.16左右;车辆需满足一定位姿条件,即车辆中心线与轨迹半径垂直相交于中心线中点,方能使车辆的通过宽度最小。本文也分析了车辆在不同轨迹跟随点组合工况下的车辆通过宽度指标,当车辆的跟随点对称且位于车辆的铰接点处,车辆的通过宽度综合指标最优。因此,轨迹跟随点应尽可能选择在车辆的铰接点,使得车辆能以最优的通过宽度通过曲线。
