列车自主控制系统在道岔安全区域的控制算法
2024-02-23王延峰谢泽会
王延峰 谢泽会
(郑州轻工业大学电气信息工程学院, 450002, 郑州)
随着城市交通运行需求不断提高,CBTC(基于通信的列车自动控制)系统逐步从以地面为中心的控制模式向以列车为中心的列车控制模式转变。目前,法国阿尔斯通公司提出的下一代CBTC解决方案Urbalis Fluence,能克服现有基于地面无线通信的列车控制系统之局限性,可将列车间隔缩短到60 s[1]。我国的交控科技股份有限公司[2]、中国中车股份有限公司[3]、中国铁道科学研究院集团有限公司[4-5]等科研企业对列车自主控制系统进行了设计和实践。列车自主控制系统成为我国城市轨道交通领域重点发展内容之一[6]。
列车在接近或行驶到一个道岔区段时,道岔的转动可能产生列车脱轨等风险事故。CBTC系统对道岔的操作控制由安全完整性等级为SIL4级的联锁系统完成。联锁系统在办理进路过程中,对道岔区段须采用严苛的检查、逻辑判断和锁闭等一系列复杂的安全控制程序,存在对道岔区段资源分配效率不高的现象。列车自主控制系统取消了地面联锁系统,使列车自主控制系统成为道岔的控制主动发起者。合理划分道岔区段和安全高效地控制道岔转动成为列车自主控制系统设计的关键点之一。
本文对以列车自主控制系统为对象,根据道岔转换的特点和需求,定义道岔安全区域,采用新的道岔区段控制算法,在保证列车安全通过前提下进一步提升道岔区段通行效率。
1 列车自主控制系统的架构
列车自主控制系统的架构如图1所示。该系统以列车为中心,由列车在行驶过程自主控制所需的进路资源,如轨道区段和道岔区段,系统架构图车载系统包括OR(车载天线)、ATP(列车自动保护)子系统、ATO(列车自动运行)子系统、里程计和应答器;地面系统包括RM(资源控制器)和轨旁设备。各部分功能如表1所示。
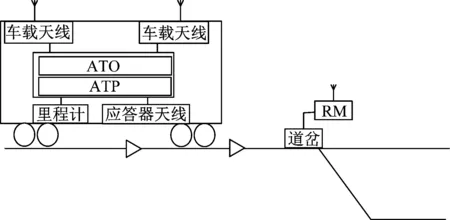
图1 列车自主控制系统的架构图
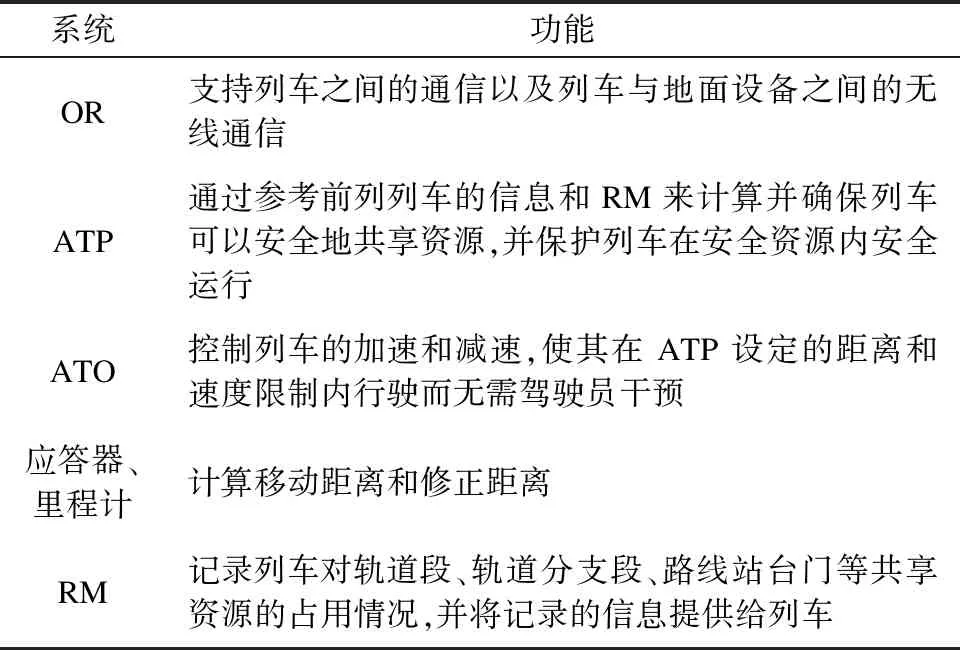
表1 列车自主控制系统的组成及功能
2 道岔安全区域控制算法
2.1 道岔安全区域
CBTC系统中的道岔区段根据联锁系统的控制需求,采用以地面为中心的安全防护逻辑,其划分的道岔区段安全范围过大。列车自主控制系统取消了地面安全防护系统,将安全防护功能转移到列车自主控制系统,因此道岔区段可根据列车长度进行精准分割,将道岔转动部分减少至道岔安全区域。
将道岔SA(安全区域)作为RM中的一个信号量区域进行管理,其长度控制为一列列车的长度,如图2所示。其中,SA起点坐标为PPB,终点坐标为PRSFP和PNSFP(PRSFP和PNSFP处为警冲标在两边钢轨的投影垂直点),Dp为警冲标距离轨道中心线距离。
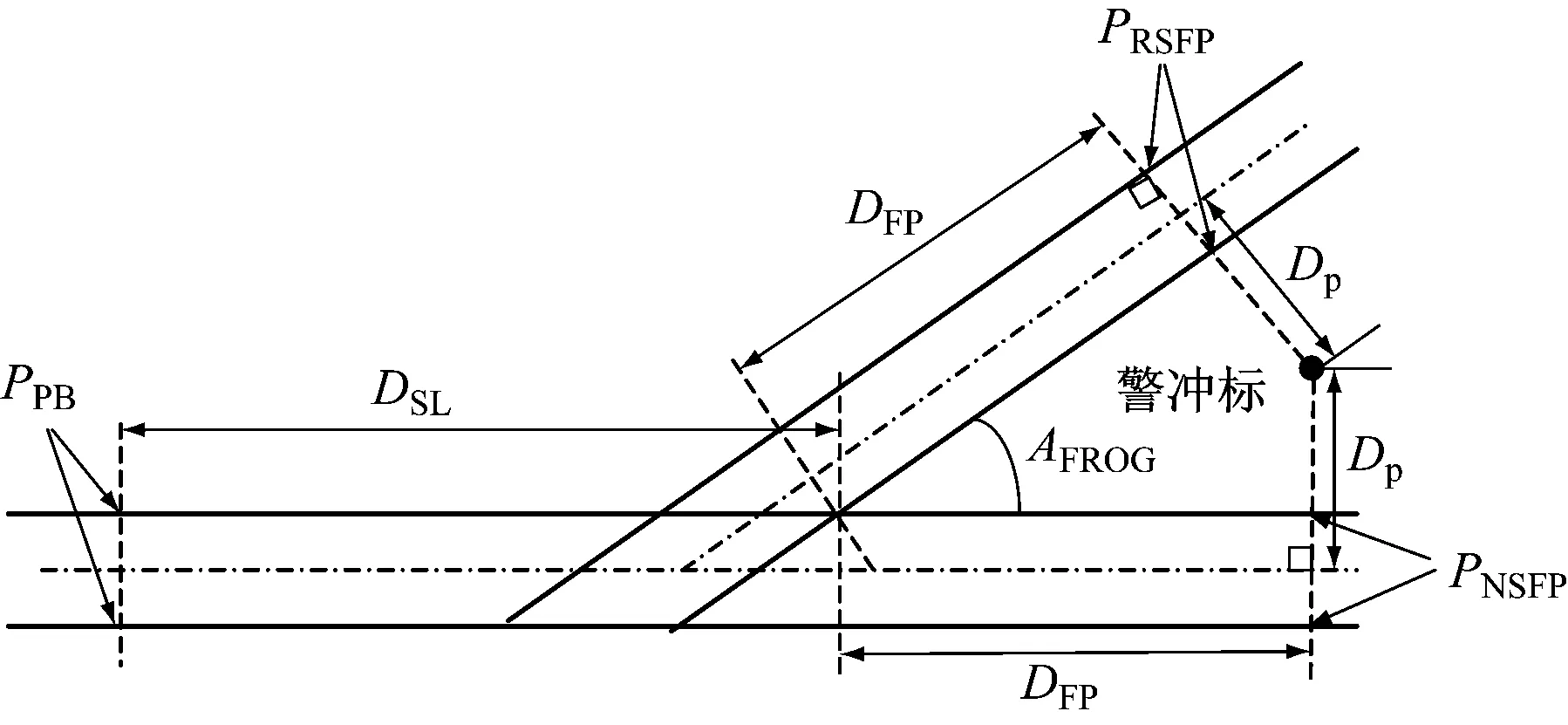
注:DSL—道岔叉心到道岔区段绝缘节的长度;DFP—道岔叉心到PRSFP或PNSFP的长度;AFROG—道岔角度。
结合图2可知:
(1)
式中:
DT——列车宽度;
DC、DD、DE——在道岔安全区域内的前、后和侧面的列车动态轮廓界限值。
道岔安全区域长度可用PPB-PRSFP和PPB-PNSFP表示,即:
(2)
式中:
DSWA——道岔安全区域长度;
DTRW——轨道宽度。
2.2 道岔安全区域逻辑向量
道岔安全区域的逻辑向量由6个变量构成,表示为[道岔 ID,参考TAG ID,道岔位置定/反位,道岔区域起始长度,道岔反位长度,道岔定位长度]。
不同道岔类型的道岔安全区域如图3所示。图3中,S、X、Y、Z为道岔的不同轨编号,P1、P2为转辙机编号,TAG#M、TAG#K、TAG#N为道岔的不同接入点,d1、d2、d3分别为道岔安全区域SA1的起始长度、道岔反位长度及道岔定位长度、d4、d5、d6分别为道岔安全区域SA2的起始长度、道岔反位长度及道岔定位长度。
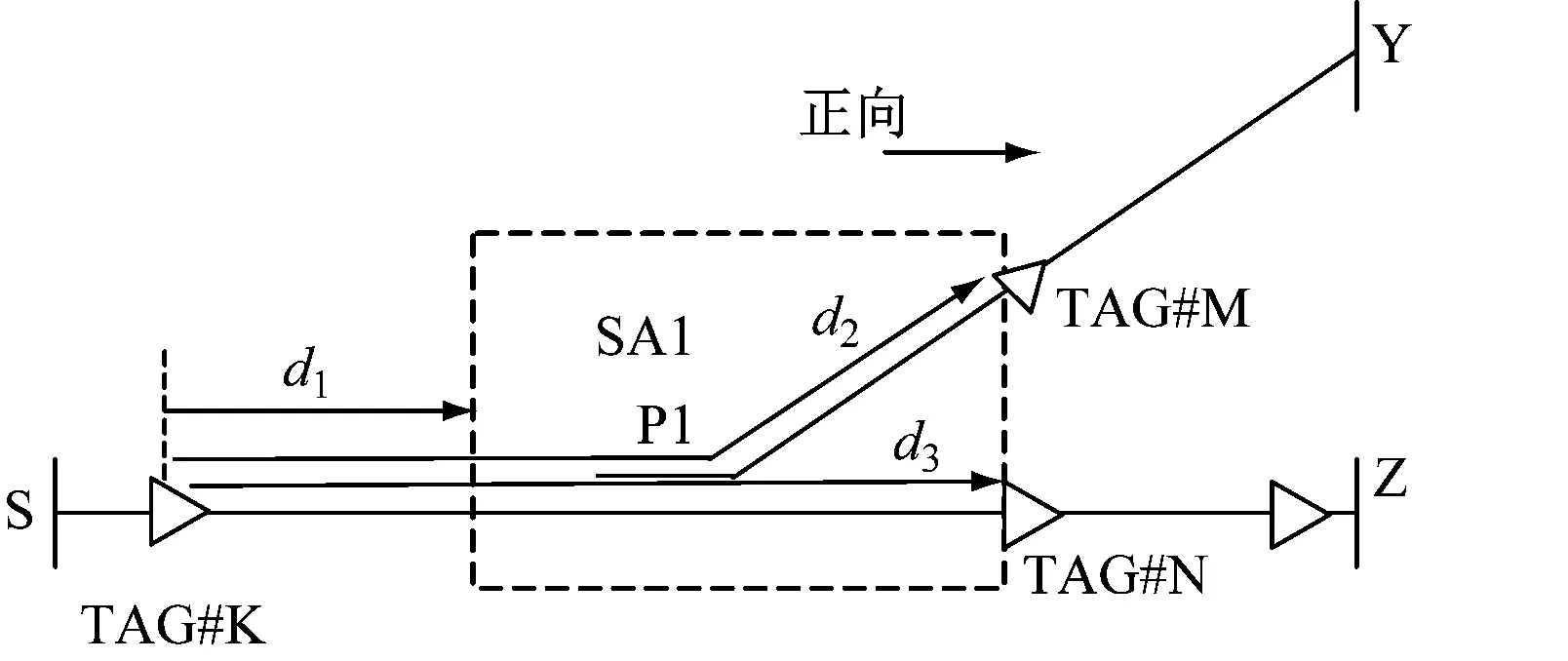
a) 单动道岔
以图3 a)的单动道岔为例,根据转辙机P1的操作,可能产生S↔P1↔Y或S↔P1↔Z方向的进路。S↔P1↔Y为道岔反位,S↔P1↔Z为道岔定位。由上文结合图3 a)可知,SA1的逻辑模型表示为[P1,TAG #K,定位,d1,d2,d3]。道岔定位和反位的SA1分别定义为TAG#K↔P1↔TAG#N和TAG#K↔P1↔TAG#M。
图3 b)为双动道岔。列车自主控制系统可对单个道岔进行操作。SA2的逻辑模型表示为[P2,TAG#L,反位,d4,d5,d6]。道岔定位和反位的SA2分别定义为TAG#L↔P2↔TAG#U和TAG#L↔P2↔TAG#M。
2.3 道岔安全区域控制算法
图4为交叉道岔区段列车自主控制系统在道岔安全区域的信息交互。图4中,列车T1在站台N出发后改变方向,准备沿Z→P3→P4→S方向进路运行(P3、P4为转辙机编号),T2在X→P1→P2→Y方向进路运行并准备停靠站台M。图4中列车自主控制系统的控制算法如下:
图4 交叉道岔区段列车自主控制系统在道岔安全区域的信息交互
1) 列车T2检查通过RM运行X→P1→P2→Y路线所需的资源状态。然后,锁闭轨道区段O、Q、E和道岔安全区域SA1和SA2,并向转辙机P1和P2发送转动到反位的控制命令。
2) RM收到列车T2的操纵道岔指令,将转辙机P1、P2转动到反位。
3) RM向列车T2发送转辙机转换到位以及资源占用状态。
4) 列车T2沿X→P1→P2→Y行驶。
5) 列车T1检查通过RM运行Z→P3→P4→S路线所需的资源状态——道岔安全区域SA3及SA4,以及轨道区段R及C,并记录在RM中。列车T1向RM发送转辙机P3及P4转动到反位的操作命令。
6) RM接收列车T1的操作道岔指令,将转辙机P3及P4转动到反位。
7) RM向列车T1发送道岔P3转换完成信息及资源占用状态信息。
8) 列车T1行驶到SA3的终点,须等待列车T2解除轨道交叉区段Q的占用状态。
9) 列车T1向RM查询交叉区段Q状态。
10) RM向列车T1发送轨道交叉区段Q资源占用状态和安全状态信息。
11) 列车T1通过交叉区段Q行驶到区段R。
3 列车自主控制系统的道岔区段场景
3.1 单开道岔运行场景
列车T1和列车T2,以相同速度运行到单开道岔区间后分离行驶。单开道岔区段运行场景如图5所示。列车T1和列车T2沿S→Y方向以最小间隔运行。为了与CBTC系统比较控制算法的性能,假设CBTC和列车自主控制系统的列车具有相同控制参数,以相同的最小间隔运行。

注:DMSD—列车间最小距离;DTL—列车长度;DTRL—道岔区段长度;DTS—两条轨道中心线的间距。
在CBTC系统控制的运行场景下,从列车T1进入道岔区段DTRL开始,直到列车T1尾部完全离开道岔区段,列车T2无法进入道岔区段。当列车T1完全出清道岔区段后,列车T2才可进入道岔区段。
在列车自主控制系统控制的运行场景下,列车T1进入道岔安全区域SA1后,列车T2则无法使用资源道岔安全区域SA1。当列车T1的尾部完全出清SA1后,列车T2才可进入道岔安全区域SA1。由图可知,列车自主控制系统控制资源单位——道岔安全区域SA1的范围要小于CBTC系统联锁安全防护的道岔区段长度DTRL。
DMSD同列车T2的紧急制动加速度aGT2相关,可以表示为:
DMSD=[(vT2+ve+aT2teGEBR)2-(vT2+ve)2]/2aT2+
(vT2+ve+aT2teGEBR)2/2aGT2+DPU
(3)
式中:
vT2——列车T2当前速度;
ve——车速传感器的速度误差;
aT2——列车T2的最大加速度;
teGEBR——GEBR(紧急制动率)等效制动的延迟输出时间;
DPU——列车的不确定性距离。
在CBTC系统控制情况下,列车 T1和列车T2之间的安全距离DCBTC为列车T1尾部完全离开道岔区段时2列列车间距离最大值,即:
DCBTC=DMSD+DTL+DTRL-(vT2-ve)2/2aT2-[vT2-
ve-aFT2(DTRL+DTL)/(vT1-ve)]2/2aT2
(4)
式中:
vT1——列车T1当前速度;
aFT2——列车T2的全制动加速度。
在列车自主控制系统控制情况下,列车T1和T2的安全间隔DATCS表示为:
DATCS=DMSD+DTL+DSWA-(vT2-ve)2/2aT2-[vT2-
ve-aFT2(DTRL+DTL)/(vT1-ve)]2/2aT2
(5)
3.2 交叉道岔运行场景
交叉道岔区段运行场景如图6所示。列车T1往Z→P3→P4→S方向行驶,列车T2行驶进路为X→P1→P2→Y。
注:DPL—站台长度;DX2P—安装弯道到站台的轨道段长度;DXM—弯道末端至末端的长度。
在CBTC系统控制的运行场景中, 在列车T1的尾部完全离开长度为DTRL的道岔区段前,列车T2只能在道岔区段外的轨道区段等待。只有列车T1完全出清道岔区段后,列车T2才可进入道岔区段,并最终停靠在站台M。列车T1行驶距离DeT1为:
DeT1=DPL+DX2P+2DXM+DCX
(6)
式中:
DCX——从P3到P4的对角线方向长度。
DCX和DXM分别表示为:
DCX=csc(AFROG)DTS
(7)
DXM=[DTRL-cos(AFROG)DCX]/2
(8)
列车T1的道岔通过时间teT1CBTC为:
(9)
式中:
aT1——列车T1的加速度。
列车T2行驶停靠到站台M所需时间teT2CBTC为:
(10)
式中:
aT2——列车T2的加速度;
DaT2——列车T2的行驶里程;
adT2——列车T2的制动加速度;
tthrow——道岔转动并锁闭的时间。
列车自主控制系统控制过程如2.3节所述,列车T1进路可以分为两部分:从站台N到道岔安全区段SA4的距离DeT1ATCS-1和经过交叉段Q后到达终点S经过的距离DeT1ATCS-2,分别表示为:
DeT1ATCS-1=DX2P+DXM+DSWA
(11)
DeT1ATCS-2=DB+DSWA+DXM+DTL
(12)
式中:
DB——轨道交叉段B的长度。
列车T1的道岔通过时间teT1ATCS可以表示为:
(13)
式中:
twait——列车T2完全通过轨道交叉段Q期间,列车T1在交汇区SA3末端等待的时间;
adT1——列车T1的制动加速度。
4 系统仿真
4.1 仿真参数
为了对比CBTC系统和列车自主控制系统在单开道岔区段和交叉道岔区段两个场景的运行性能,采用地铁A型车规格[7]和9号道岔作为仿真对象,车辆和道岔仿真试验参数如表2所示。

表2 车辆和道岔仿真试验参数
4.2 单开道岔运行场景性能分析
对图5中2列列车通过单开道岔的场景进行仿真。在CBTC系统中,列车T1以最大速度通过道岔区段,列车T2须等待列车T1尾部完全出清道岔区段;而在列车自主控制系统中,列车T2只需在列车T1完全离开SA部分后即可继续行驶。将列车T1和列车T2的安全间隔作为效率提升评价指标,列车自主控制系统在单开道岔区段运行场景安全间隔提升效率如图7所示。
图7 列车自主控制系统在单开道岔区段运行场景安全间隔提升效率
由图7可知,安全间隔提升效率随着列车紧急制动加速度的增大而减小,而加速度对安全间隔提升效率影响较小。在列车常规参数下,自主控制系统相比CBTC系统的安全间隔提升效率都有所提升,最大提升74.5%。
4.3 交叉道岔运行场景性能分析
对图 6中2列列车通过交叉道岔的场景进行仿真。将列车T1和列车T2从起始点出发到达目的点所需时间作为道岔通过时间提升效率评价指标,得到列车自主控制系统在交叉道岔区段运行场景道岔通过时间的提升效率如图8所示。通过图8即可定量评估列车制动加速度和加速度对道岔通过时间提升效率的影响。

图8 列车自主控制系统在交叉道岔区段运行场景效率提升率
由图8可知,道岔通过时间的提升效率随着列车加速度的增加而增长,而制动加速度对道岔通过时间提升效率较小。在列车常规参数下,相比CBTC系统,列车自主控制系统的道岔通过时间都有所提升,最大提升33.8%。
5 结语
为了安全高效的列车运行,定义道岔安全区域为列车自主控制系统在道岔区段控制的资源,提出道岔控制算法,并在单开道岔区段和交叉道岔区段两种常见的城市轨道交通运营场景进行了资源利用效率定量分析。
仿真结果证明,与现有的CBTC系统相比,列车自主控制系统的安全间隔和道岔通过时间效率有所提升。本研究可为列车自主控制系统的设计提供参考。在具体工程应用过程中,应结合具体项目特点进行适应性分析,实现效率安全可靠的提升。
