基于LiDAR的掘进机防碰撞系统
2024-02-23姜永晨周明星
姜永晨,周明星
(上海创力集团股份有限公司, 上海 201706)
随着国家大力推进煤矿智能化建设,掘进机作为开采巷道的主要装备,具备精准的主动防碰撞功能是其提供井下安全生产的保证。传统的掘进生产工艺,需要掘进机掘进一段后退出工作区,完成支护、锚固等作业。井下工作空间有限,掘进机通常需要靠着巷道边行走为其他工艺设备腾出空间。由于驾驶员存在视野盲区,通常需要其他人配合观察,再加之煤矿掘进工作面环境恶劣,煤灰与噪声对人的感知造成极大的影响,干扰工人间的配合,易出现行走的掘进机与巷道相撞的情况,对工人安全和机器造成危害。精准的掘进机与巷道位置信息可为远程操作控制人员提供决策的依据,对于综掘智能化建设具有重要的现实意义。
防碰撞方式可分为被动式的防碰撞机械机构与主动式的碰撞预防系统。王世杰等[1]从静力学属性角度对耐碰撞机构进行研究,优化耐碰撞机构结构设计,达到进一步提高机械强度的目的。被动式作为防护安全的最后屏障是不可缺少的,但无法主动避免碰撞的产生。刘俊、左夺等[2-3]研究解决了掘进机悬臂作业防干涉掘进规划、悬臂运动关节防干涉掘进规划以及悬臂与巷道之间的避碰处理问题、铲板部和截割部的运动干涉问题。杜春晖[4]研究设计了将UWB高精度测距技术与红外热成像目标识别技术相结合的采掘运输设备防碰撞系统,实现井下所有人员的防碰撞预警,尤其佩戴标识卡的人员实现了双重防护。目前,针对掘进机与巷道侧帮的防碰撞检测方法较少,因此提出了一种基于激光雷达的主动式掘进机与巷道侧帮防碰撞系统。
1 防碰撞系统总体设计
该系统主要由激光雷达数据处理模块、声光报警模块、数据显示模块组成。因其应用于掘进机上,工作在有瓦斯和煤尘爆炸风险的矿井环境,所有器件均采用本安电源供电。防碰撞系统总体设计见图1.

图1 基于激光雷达的掘进机防碰撞系统总体设计
激光雷达数据处理模块主要包括16线机械式激光雷达、工业以太网交换机、工控机。激光雷达主要采集巷道侧帮面的点云信息。交换机主要用于多激光雷达与工控机的信息连接,提供更多的连接端口。工控机主要用于运行后台算法程序,处理激光雷达原始数据,输出定位结果。
声光报警模块主要由基于STM32的控制器和RS485通讯模块以及声光报警器组成。控制器接收来自工控机的定位数据,判断是否报警,并将结果信息数据传递给显示模块。RS485通讯模块用于工控机与控制器之间的串口通讯,传递雷达定位信息。声光报警器采用矿用本安型,通过闪烁和语音进行报警提示[5].
数据显示模块分别使用掘进机机载的显示屏和远端集中控制中心显示屏显示。当现场操作掘进机时,可以在机载屏幕上查看定位信息及报警信息;在远端集控操作掘进机时,基于Qt开源版开发的掘进机自动化软件中显示出掘进机三维模型的位姿和与侧帮煤壁的相对距离,为远程操作提供数据支持。
2 防碰撞系统原理
2.1 确立坐标系
首先是坐标系的确立,在仅考虑掘进机与巷道侧帮发生碰撞的情况下,以俯视的角度可以将三维空间内的复杂问题简化为二维平面情形,所以建立掘进机俯视投影下的二维坐标系即可。掘进机以截割臂回转中心作为坐标系原点,沿机器中心线面向煤层为y轴正方向,垂直机器中心线向右为x轴正方向。考虑到在实际工作面工作时还有机器振动,煤巷中水雾粉尘都会对定位数据产生一定影响,导致激光雷达安装位置和方向尤为重要。振动影响方面,因为x向线振动仅在坡度存在时才会产生y和z向的定位误差,而y和z向线振动不影响x向定位精度[6].所以激光雷达安装时坐标系方向与掘进机坐标系相同,并在软件算法中加入均值滤波,可大幅减少振动对x方向定位精度的影响。由于截割臂截割时会在前方产生大量水雾煤灰,实际生产中放在机器前端的激光雷达易出现泥浆煤灰覆盖在表面且极难清理的状况,导致激光雷达测量数据失真,所以选择安装在掘进机后端右侧扫描巷道侧帮,避免了极端情形,再加上日常维护,可减少由于水雾煤灰对激光雷达产生的影响。激光雷达坐标系以安装位置为原点,坐标系方向与掘进机坐标系相同,具体位置见图2.
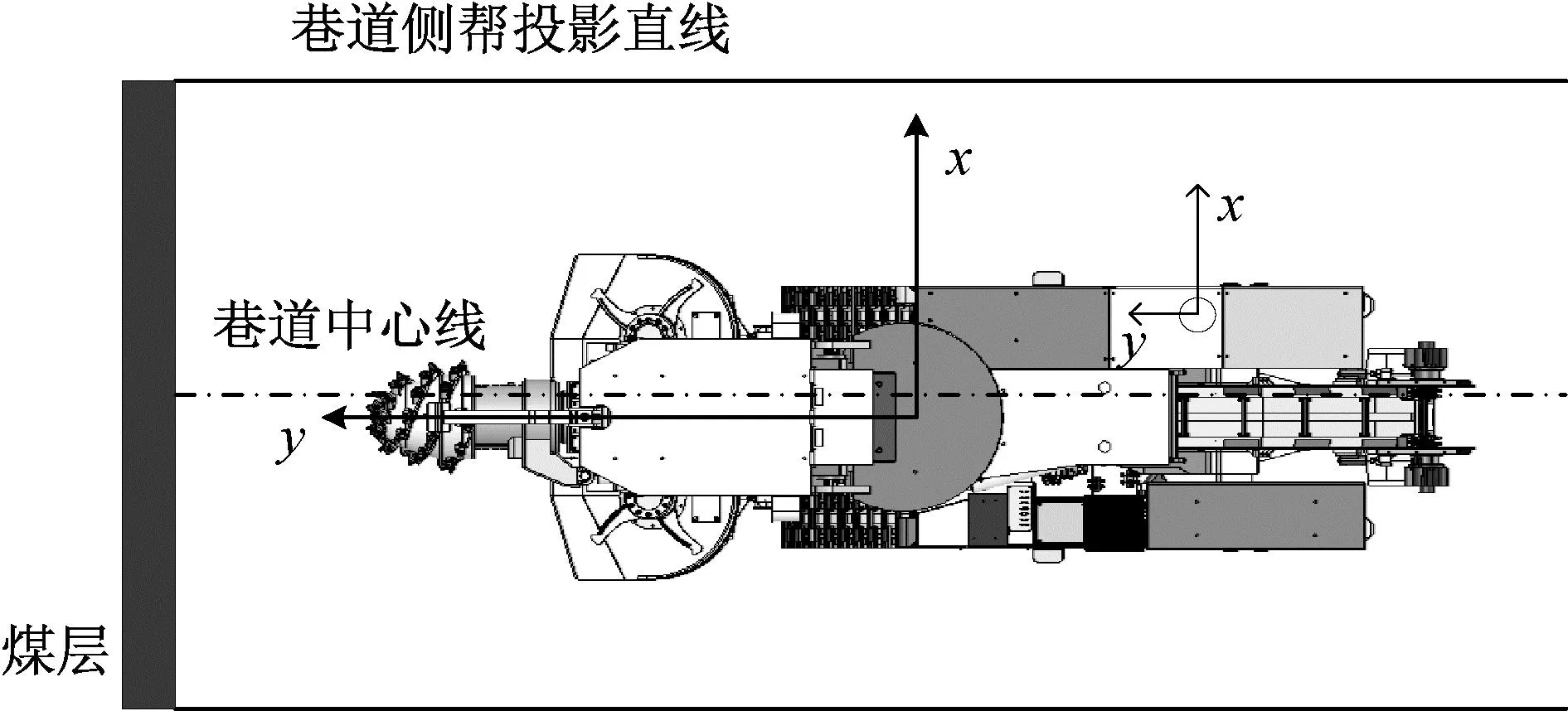
图2 掘进机坐标系与激光雷达坐标系示意
2.2 防碰撞原理
防碰撞原理流程图见图3,主要目的是得到掘进机与巷道侧帮的距离信息。首先基于多线激光雷达传感器扫描巷道的点云信息,经处理计算后得到掘进机在巷道中的定位信息,再结合掘进机机器模型参数得到机器角点与巷道侧帮的距离关系,当该距离小于设定的阈值时,掘进机进行报警提示。
2.3 掘进机定位
激光雷达扫描巷道侧帮,产生大量激光点云原始数据,先经过滤波处理,剔除异常点,接着选取特定角度范围内的点云,增加数据准确度的同时可以减少点云数据量,加快计算速度。使用PCL点云库中的采样一致性(sample consensus)模块对选取的点云进行分割拟合,提取平面模型,得到模型参数{a,b,c,d},则巷道侧帮的平面方程为ax+by+cz+d=0,其俯视投影线的方程为ax+by+d=0,斜率为k=-a/b. 当k>0时,见图4(a),侧帮俯视投影线的倾斜角β=tan-1(-a/b);k<0时,见图4(b),β=tan-1(-a/b)+π[7]. 雷达方位角α经顺时针旋转得到的为负角,反之为正角,由此结合图4可知α=π/2-β. 激光雷达安装在掘进机上可视为同一刚体,所以掘进机的方位角等于雷达方位角α.

α—方位角;β—侧帮俯视投影线的倾斜角p—雷达坐标系原点图4 巷道侧帮平面俯视投影
激光雷达坐标原点到巷道侧帮投影线的距离dc等于平面方程参数d的绝对值。雷达安装位置与掘进机坐标原点的距离关系见图5.

o—机器坐标系原点;q—雷达原点垂直机器中线交点图5 掘进机坐标原点与雷达坐标原点位置关系
机器坐标原点与巷道中心线在水平方向的偏移距离为:
Δx=wt/2-dc-xccosα-ycsinα
(1)
式中:wt为巷道设计宽度,m;xc为p点到q点距离,m;yc为O点到q点距离,m.
由此可得,掘进机在巷道中的方位角α和与巷道中心线水平方向的偏移距离Δx定位信息。
2.4 碰撞检测
结合掘进机4个边缘角点(包括掘进机铲板左右两角点与掘进机机身后方两角点)与回转中心的位置关系,可以得到掘进机4个角点与巷道两侧帮的距离,以此可检测是否发生碰撞。
根据勾股定理可以计算在俯视投影下角点到回转中心点的连线距离lr和该连线与机器中心线的夹角θ.
(2)
θ=tan-1(ls/2/lt)
(3)
式中:ls为铲板或机身宽度,m;lt为回转中心沿机器中线到铲板或机尾距离,m.
根据各角点与回转中心的位置关系,计算掘进机各角点与侧帮的距离。当掘进机顺时针转动到方位角α<0时,见图6(a). 以计算铲板角点与侧帮距离为例,此时优先计算铲板右角点与右侧帮壁的距离,铲板右角点距巷道中心线的距离为:

图6 掘进机角点与巷道侧帮位置关系
xr=lrsin(|α|+θ)+Δx
(4)
则铲板右角点到右侧帮距离为:
xa=wt/2-xr
(5)
则铲板左角点与左侧帮的距离:
xb=wt-lxcosα-xa
(6)
同理机身后方角点与侧帮距离需优先计算机身后方左角点与左侧帮壁的距离,不同处在于左侧角点距巷道中心线距离是xl=lrsin(|α|+θ)-Δx,其余计算过程相同。而当掘进机逆时针转动到方位角α>0时,见图6(b). 计算过程与方位角α<0时类似,不再列出,此时需要优先计算的是铲板左角点与左侧帮壁和机身后方右角点与右侧帮壁的距离。
根据计算得到的4个角点与巷道侧帮的距离,判断是否存在碰撞风险。如果任意一个角点与巷道侧帮的距离小于预设阈值0.5 m时,则认为存在碰撞风险,掘进机将发出声光警报,提示操作人员采取相应措施;也可以进一步设置当任意一个角点与巷道侧帮的距离小于预设阈值0.2 m时,掘进机将停止继续前进或后退。此阈值可以根据井下不同工作面的实际状况自主设定[8],同时由于惯性,理论上掘进机机型越大需要设定的阈值就越大,以此提高安全性。
3 试验测试结果
为验证基于激光雷达的掘进机防碰撞系统的有效性,使用C++在基于ROS的框架下编写的软件程序运行在工控机中,其核心是验证掘进机角点与巷道侧帮相对距离数据的准确性,使用自动化掘进机在模拟巷道中进行了测试。测试时工控机使用modbus_tcp协议与控制器通讯,同时电脑使用ModbusPoll软件进行数据读取。
试验方式:模拟巷道宽8.32 m,在巷道左右两侧各做离侧帮壁0.5 m的标记线,掘进机在巷道中靠边侧行走,依次将掘进机4个角点驶进标记线内,当掘进机某一角点小于设定的0.5 m阈值时触发警报闪烁并停止行走。记录此时软件上四角点离侧帮距离的数据,并使用钢卷尺人工测量此时该角点到标记线的最短距离,再计算该角点到巷道侧帮的实际值与程序计算值的差值,数据结果见表1.

表1 掘进机四角点到巷道侧帮距离的计算值和实际测量值数据 mm
通过分析表1中角点距离巷道侧帮实际值与计算值的差值数据可知,定位数据误差在±3 cm,可以满足实际需求。理论上定位数据误差值的产生主要取决于掘进机机械结构参数的实际值与设定值之间的差异,以及侧帮面并非完全平整,算法计算使用的是激光雷达到扫描的侧帮平面均值距离,而非人工测量时到侧帮面某点的距离。
通过掘进机停止时角点到标记线距离的数据可知,掘进机可以在设定阈值的±7 cm报警和停车,实现防碰撞功能。停车时掘进机角点距侧帮的实际值与设定阈值之间的误差除了定位数据的误差因素外,还有控制器发出停车信号后,机器不能立马停止。可以继续优化处理控制算法,减少与设定阈值的差距。
4 结 语
针对煤矿井下掘进工作面环境,设计一种基于激光雷达的掘进机与巷道侧帮防碰撞系统,当掘进机与巷道侧帮即将碰撞前主动发出声光报警,及时提醒驾驶者进行操作处理,必要时停止掘进机前进或后退,避免与巷道侧帮相撞,提高了掘进作业时的安全性,减少事故发生率。
