基于海天线的红外掠海小目标跟踪
2024-02-18李颖娟许开銮刘培桢宋金鸿曹玉举张旭辉
李颖娟,许开銮,刘培桢,宋金鸿,曹玉举,张旭辉
(西安应用光学研究所,陕西 西安 710065)
引言
在现代海战中舰船面临着大量不同类型的空中威胁,尤其是低空飞行的掠海目标,如掠海反舰导弹、制导炸弹和超低空飞行的飞机。为了实现精确打击,必须在远距离及时发现并锁定来袭目标,继而进行稳定跟踪。舰载雷达是检测和跟踪远距离空中或海面威胁目标的主要手段,但是雷达系统提供的俯仰数据精度差,无法满足舰船防御系统的要求。为了更好地应对来袭目标,需要光电跟踪仪对目标进行高精度跟踪。对光电跟踪仪来说,海上目标检测和跟踪也面临着诸多挑战。首先,海上环境复杂多变,常出现下雨、雾霾等恶劣天气;其次,受光照、风、海浪等多种自然因素的影响,海面环境一直处在动态的变化过程中,在海上环境中采集的视频数据包含了大量噪声和扰动信息,如杂乱无章的鱼鳞光、不规则运动的纹理丰富的波浪等;最后,海上目标可视范围小,视频信息抖动剧烈,位置变化严重,实时精准跟踪困难。
针对海上目标的检测,文献[1]提出了一种采用直方图先进行红外目标增强,然后通过二值化、开运算进行目标检测的算法;文献[2]采用了基于高斯拟合构建出具有目标导向特性的对比度自适应增强策略,研究了基于时域和空域融合提高信噪比的策略和基于暗通道理论的图像去雾,通过这些手段提高海上红外小目标检测的准确性;文献[3]提出了计算图像行均值和梯度,然后通过最小二乘法拟合海天线,再通过形态学处理抑制图像背景,在海天线附近进行目标检测和跟踪的方法;文献[4]利用Top-hat 算子进行形态学滤波处理,抑制平缓变化的背景并保留高亮度区域的目标和强噪声,通过选择结构元素进行形态学开运算,去掉细小的背景杂波干扰;文献[5]提出了一种基于神经网络的自学习功能进行优化训练,使得滤波过程变得更加智能化,从而实现背景抑制,但是该方法需要大量的训练数据,距离实时应用还有一段距离。
根据以上分析可知,面对复杂海洋天候环境下出现的新挑战,传统的目标检测技术已经无法满足海上数据实时、高效处理的需求。而且,在海天背景条件和远距离平视状态下,导弹、无人机、舰、船、艇等目标总是在海天线附近出现。因此,对弱小目标检测之前,需要海天线来进行辅助判断。本文分析了海天背景下红外小目标的特征,提出了一种基于海天线的红外掠海小目标跟踪方法。
1 红外掠海小目标检测流程
在目标搜索过程中,雷达发现远距离来袭目标会向光电跟踪仪发送目指指令,光电跟踪仪先判断是否有搜索雷达的目指信息,如果有,则以目指为中心自动检测雷达指定区域内的目标;如果没有,则判断是否有开启了海天线辅助判断功能。如果开启了,则以海天线为界,分别对海天线上下一定区域进行搜索,该搜索区域可以通过光电跟踪仪的相关参数计算出来;如果没有开启海天线辅助判断功能,则在系统指定的搜索波门范围内进行搜索。如果连续N帧搜索到的都是同一个目标,就跟踪该目标,如果搜索到多个目标,就根据目标的大小、亮度、位置、目标和海天线的距离等特征信息,采用文献[6]的方法确定威胁度最高的目标进行跟踪,算法流程图如图1 所示。
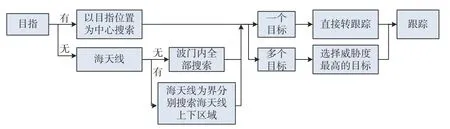
图1 红外掠海小目标检测流程图Fig.1 Flow chart of infrared sea-skimming small target detection
1.1 目标所在区域判断
在红外传感器的视距范围内,掠海飞行的导弹、飞机是最重要的威胁来源,掠海飞行高度很低,一般为海面以上5 m~40 m。在掠海目标来袭的过程中,目标在图像中一般处于海天线上下一定范围内。假设红外传感器架高为hc,目标距离为D,目标飞行高度hT,目标与海天线夹角为θ,红外传感器视场角为fov,图像纵向分辨率为ph,假设地球是理想球体,地球半径为R,根据参考文献[6]的分析可知目标和海天线的位置关系为
根据式(1)可以计算出目标不同飞行高度在由远及近距离变化时与海天线的位置关系。假设架高20 m,图像高度512 像素,红外传感器视场3°,当目标飞行高度分别为5 m、8 m、10 m、15 m、20 m、25 m、30 m、35 m、40 m,目标距离从15 km 到500 m逼近时,目标和海天线的相对位置如图2 所示。图2 中横坐标为目标与光电跟踪仪的距离,纵坐标为图像中目标与海天线的位置关系。可以看到,当目标较远时,目标在图像中的位置基本都在海天线以上50 像素范围内;当目标靠近时,飞行高度高于架高的目标会向上逐渐远离海天线,飞行高度低于架高的目标会逐渐向下靠近海天线,然后穿越海天线,最终向下远离海天线。例如,飞行高度为5 m 的目标在距离光电跟踪仪15 km 时,其在图像中的位置约在海天线以上3 像素左右,当其逐渐靠近时,在图像中的位置逐渐靠近海天线,在距离约8 km 时到海天线以下。当掠海目标在距离2 km 以外时,基本都处于海天线上100 像素至海天线下50 像素以内,因此对于低空掠海飞行目标可以以海天线为参考进行搜索和跟踪。
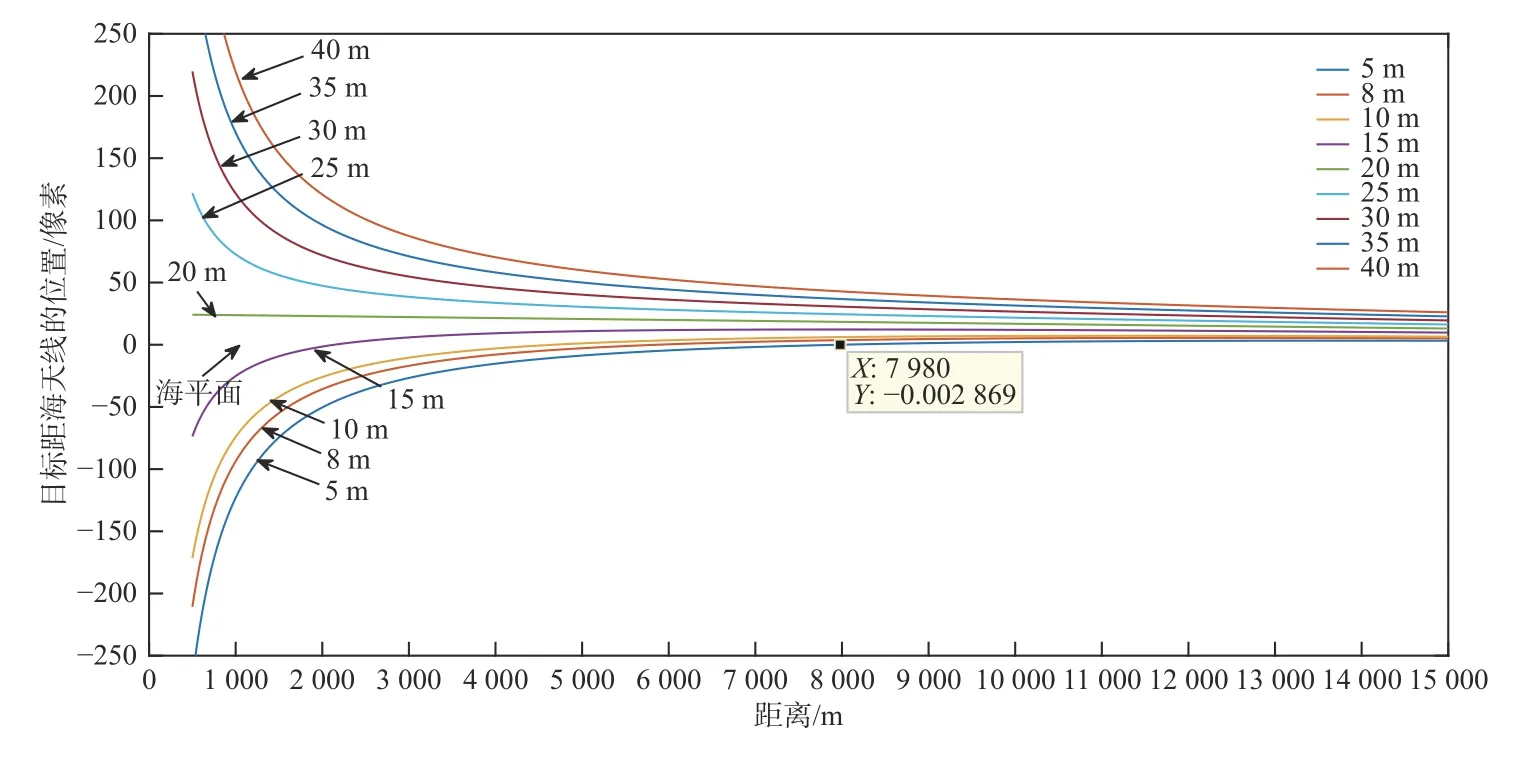
图2 目标与海天线的相对位置图Fig.2 Relative position diagram of target and sea-sky line
1.2 海天线检测原理
目前红外图像海天线检测主要是利用海面与天空的灰度特性来实现的[7]。例如计算图像列方向上的灰度梯度值,灰度梯度最大的地方被认为是海天线,这种方法的缺点是抗干扰能力差,容易受到天空连续杂乱的云层以及海面上纹理丰富的波浪影响,在舰船、岛屿、大的海浪等干扰的情况下,检测也会出错,形成伪直线。基于灰度共生矩阵和Hough 变换的海天线检测方法[8],数据量大,尤其针对10 位、12 位、14 位等高精度视频,数据量急剧上升,在线实现效率很低。针对现有的海天线检测的技术问题,提出了一种抗干扰能力强,且能够在复杂海面环境中有效、实时地进行海天线检测的方法。本方法的流程如图3 所示,首先计算采集到的红外图像的纵向灰度梯度图,对灰度梯度图进行阈值分割,得到二值化图像,搜索二值化图像的边界点,再通过Hough 变换计算海天线的截距和斜率。该方法对于天气变化、光照不均、云层干扰、海面波浪、岛屿、大型船只、海鸟、海岸景物干扰有很好的鲁棒性,不同倾斜度的海天线均能检测出来。该方法计算量小,内存占用小,算法原理简单,实现效率高。

图3 海天线检测原理Fig.3 Schematic diagram of sea-sky line detection
假设原图为F,如图4(a),则灰度梯度图Gray的计算公式为
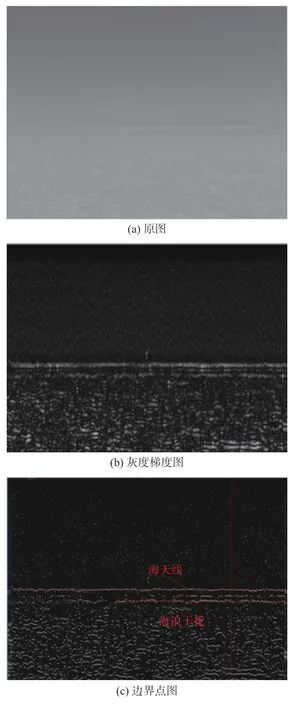
图4 海天线检测效果图Fig.4 Effect diagram of sea-sky line detection
分割阈值GThreshold可以通过加权灰度梯度图的灰度均值GAverage和方差GStd值得出:
式中k为系数。
对灰度梯度图图4(b)进行阈值分割,得到二值化图像。搜索整个二值化图像的边界点位置序列EdgeMapList,边界点图像如图4(c)所示,将边界点坐标送入Hough 变换函数进行计算,搜索Hough 空间的最亮点位置,记该最亮点的坐标为(ρ,θ),由于直角坐标系中的直线和Hough 空间中的点是一一对应的,即 ρ=x·cos(θ)+y·sin(θ)。因此,通过坐标转换可以计算出海天线的斜率k和截距b。
1.3 基于对比度的目标检测与跟踪算法
由于红外传感器是通过测量物体的热辐射来实现的,因此红外图像中的目标边缘经常比较模糊[9],在远处成像时,目标往往是中间较亮、周围较暗的斑点,而且由于红外传感器的自身缺陷,红外图像噪声较大,且伴有坏点、非均匀噪声等干扰,导致目标检测和跟踪非常困难。首先用8 方向的拉普拉斯滤波器对图像进行滤波,滤波模板如下:
该算法的计算公式如下:
这样就可以增加目标和周围背景的对比度,有助于把目标从背景中提取出来。按照1.1 节的分析,目标刚出现在视场内时,都是在海天线的上面,如果上位机没有发送目指信息,但是打开了海天线辅助检测功能,那么计算海天线的位置,只搜索海天线以上一定范围内的天空部分,这样可以滤除海面杂波和天空云层的干扰。确定了搜索范围后,经过分析现有的红外小目标跟踪算法[10-12],本文选用执行效率高、跟踪效果较好的多尺度块对比度算法(MPCM)[13-14]对搜索范围内的图像进行运算,计算公式如下:
式中:T表示块索引;N表示块尺寸;f(x,y)表示当前处理图像像素索引。
计算每个尺度下检测区域的中心区域和8 个邻域的灰度均值差,得到一个目标处比较亮的灰度图,如图5(b),对灰度图进行阈值分割,把目标从背景中提取出来。如果分割出来只有一个目标,那么就跟踪此目标;如果检测出来有多个目标,由于图像噪声和海杂波是闪烁不定的,亮度大小变化较大,而且不可能连续多帧同时出现,因此可以通过统计检测出来的目标的大小、亮度、位置等信息并进行比较,最终选出威胁度最大的目标进行跟踪。通过前面的分析可知,掠海飞行的目标一直会出现在海天线上下一定范围内,因此跟踪范围以海天线为界,在海天线上下一定范围内进行目标跟踪,可以有效避免海面杂波、船只、海鸟、天空云层、红外非均匀噪声的干扰。
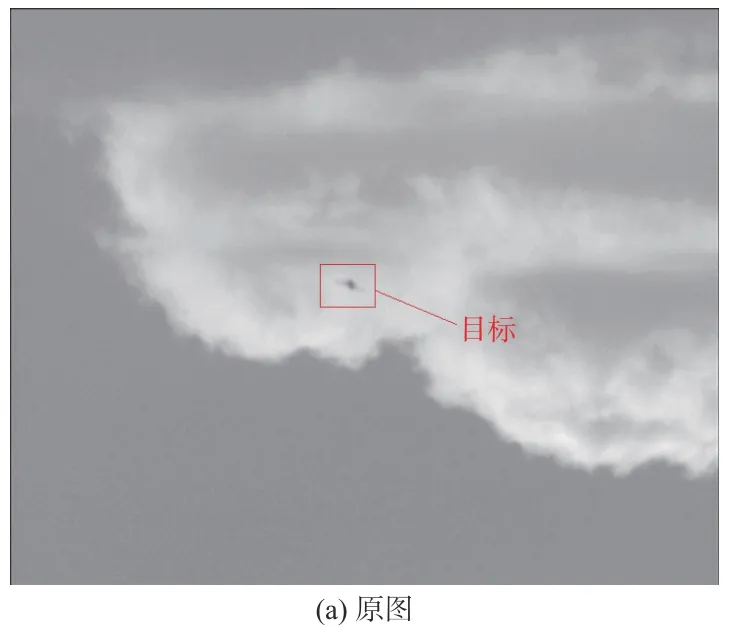
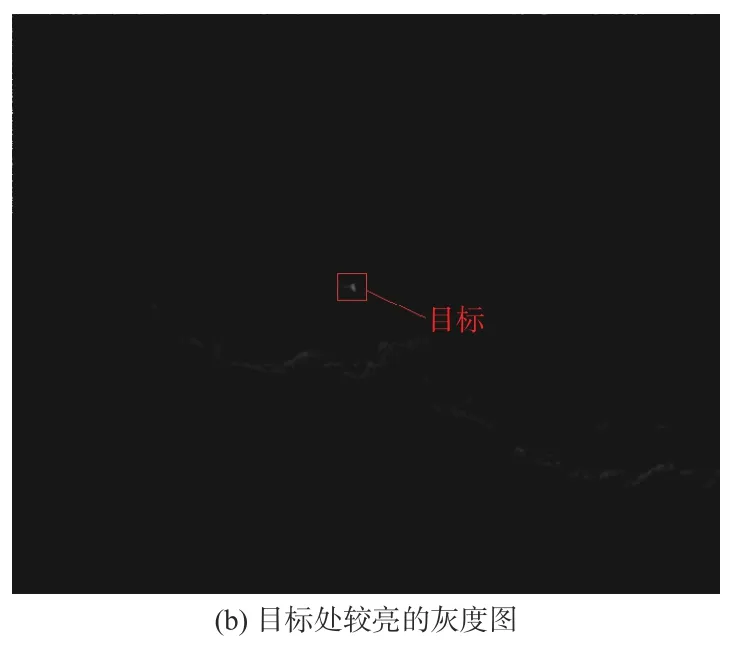
图5 目标提取效果对比Fig.5 Comparison of target extraction effects
2 仿真验证
2.1 海天线检测效果验证
为了检验海天线检测算法的效果,在某光电跟踪仪项目外场试验中对各种算法进行了验证。计算出海天线位置后在原图相同位置叠加白色线条作为标记,检测效果如图6 所示。根据算法原理,在海天线倾斜的情况下也是可以检测出来的。为了验证船摇状态下海天线检测算法是否有效,试验中使光电跟踪仪倾斜一定角度进行验证,检测结果如图6。图6 中(a1)、(b1)、(c1)、(d1)是采用OTSU(大津法)算法得到的海天线计算结果,图6的(a2)、(b2)、(c2)、(d2)是纵向灰度梯度最大值法得到的海天线计算结果,图6 中(a3)、(b3)、(c3)、(d3)是采用离散度阈值法得到的海天线计算结果,图6 中(a4)、(b4)、(c4)、(d4)是本文算法的海天线计算结果。
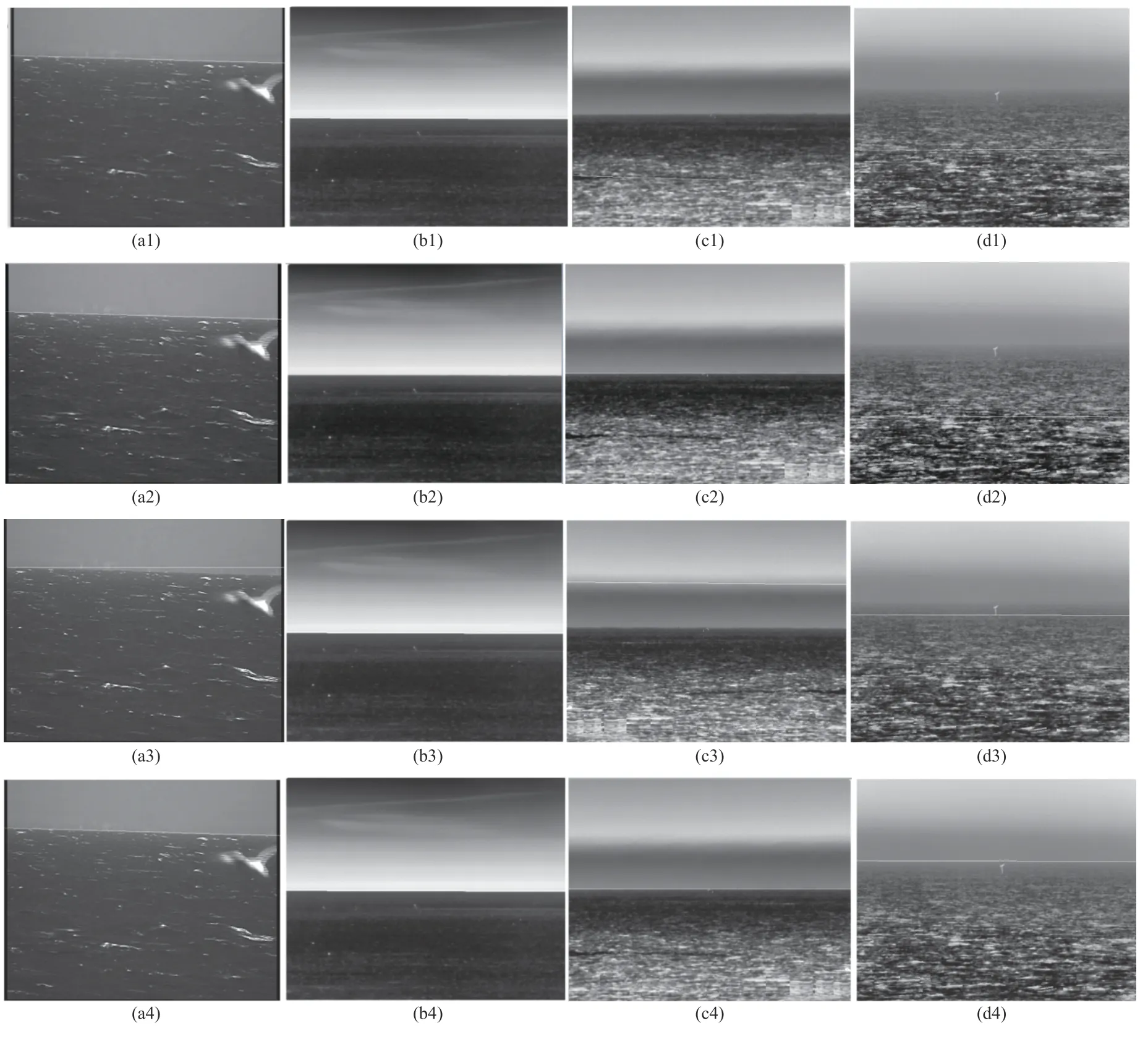
图6 不同方法的海天线检测效果对比Fig.6 Comparison of sea-sky line detection effects using different methods
可以看出,在海面和天空对比度大、海天线清晰、天空无云或仅有少量薄云、海浪比较小的时候,各种算法均能正确检测出海天线;当海天线倾斜时,离散度阈值法不能检测出海天线的斜率;天空云层较厚时,OTSU 法和离散度阈值法失效;海天线对比度小、海浪比较大时,OTSU、灰度梯度法、离散度阈值法均失效,而本文算法在这些情况下均能正确检测出海天线,具有很好的鲁棒性。
2.2 检测、跟踪效果的验证
为了检测算法对掠海弱小目标的检测、跟踪效果,在某型光电跟踪仪外场试验中采用本文算法进行了验证。光电跟踪仪的红外视频图像分辨率为640×512 像素,帧频为100 Hz,视场为1.5°。为了测试海天线对红外掠海小目标的检测、跟踪辅助效果,不发送目指信息,对同一弱小目标分别关闭和开启海天线辅助判断的检测、跟踪情况进行对比,如图7 所示。图7 中白色矩形表示波门,在没有搜索到目标时,显示较大的矩形框,当搜索到目标时,波门缩小并以目标中心作为波门中心。图7 中白色十字表示光电跟踪仪的轴位,当跟踪到目标后,伺服会将轴位调转至目标中心处,实现目标跟踪。图7(a)、图7(b)是有无海天线跟踪效果图对比序列,真实目标中心位于海天线以下约10 像素处,目标灰度均值为210,目标尺寸约为20×15 像素,目标面积约为200 像素,目标持续稳定出现。在海天线上有一干扰物,灰度均值约为200,尺寸在2×2 像素至10×10 像素之间随机变化,闪烁不定。
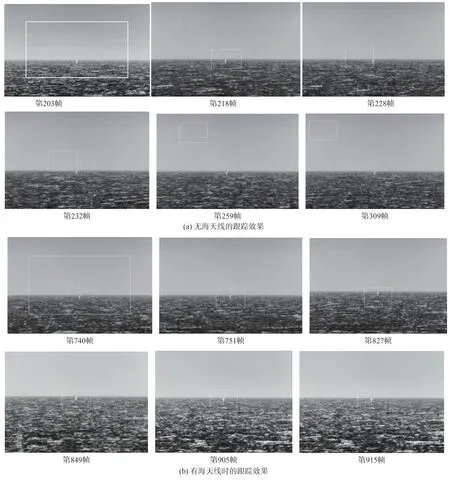
图7 有无海天线跟踪效果图对比序列Fig.7 Comparison sequence of tracking effects with and without sea-sky line
以图7 序列中的某一帧为例进行背景抑制计算,原图的方差为53 612,背景抑制后方差为5 748,信噪比为28 dB,可见背景得到了抑制。
图7(a)是一直关闭海天线的检测效果,可以看出,第203 帧处于搜索状态,第218 帧正确捕获到了目标,第228 帧捕获到了海面上的干扰物,第232 帧捕获到了海天线附近的天空,第259 帧、第309 帧明显捕获错误,并且远离真实目标。可以看出,在没有海天线辅助判断的情况下,有时可以正确检测出目标,有时会检测到噪声上,不能有效跟踪海天线附近的目标。图7(b)是开启了海天线的跟踪视频序列,图中海天线两侧的位置有白色“X”字符,表示检测出的海天线位置。可以看出,第740 帧时在搜索,第751 帧正确捕获到了目标,第827 帧和第849 帧是光电系统的伺服调转过程,第905 帧和第915 帧是光电系统已经稳定跟踪上目标了。视频序列中目标处于海天交界处,目标较小,亮度较弱,目标和天空对比度较小,并且目标周围有大量的海杂波干扰,采用原来的算法检测不出目标,也不能进行稳定跟踪。但是采用本文提出的方法打开海天线辅助判断后,算法能正确检测出目标,并引导伺服稳定地跟踪目标。
为了对算法的跟踪精度进行测试,在试验场对由远及近的掠海目标进行跟踪。远处目标在图像中较小,随着目标的靠近,目标在图像中所占像素逐渐增大,直至光电跟踪仪停止跟踪时,目标约占图像一半大小。图8~图10 是从远处捕获目标后一直跟踪至光电跟踪仪停止跟踪的测试结果。图中横坐标为帧数,纵坐标为目标在图像中的实际位置和跟踪点之间的误差,单位为像素。可以看出,稳定跟踪后的跟踪精度为1 像素;当跟踪快结束时,由于目标在图像中所占像素增大,跟踪误差也稍有增加。因此采用海天线辅助判断后,可以保证光电跟踪仪对红外小目标的跟踪精度。
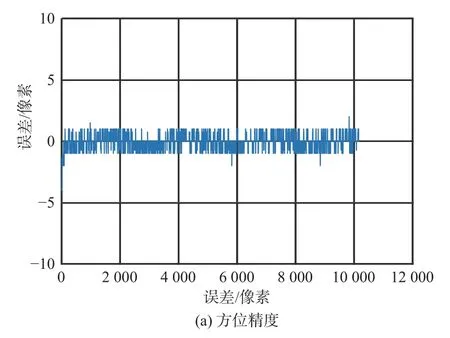
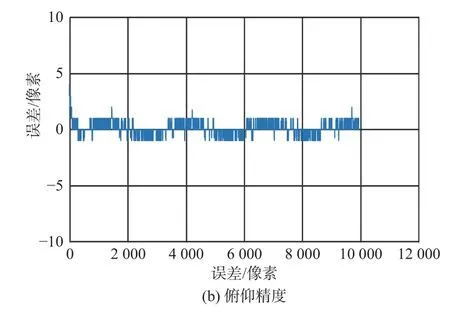
图8 第1 次跟踪精度Fig.8 The 1st tracking accuracy
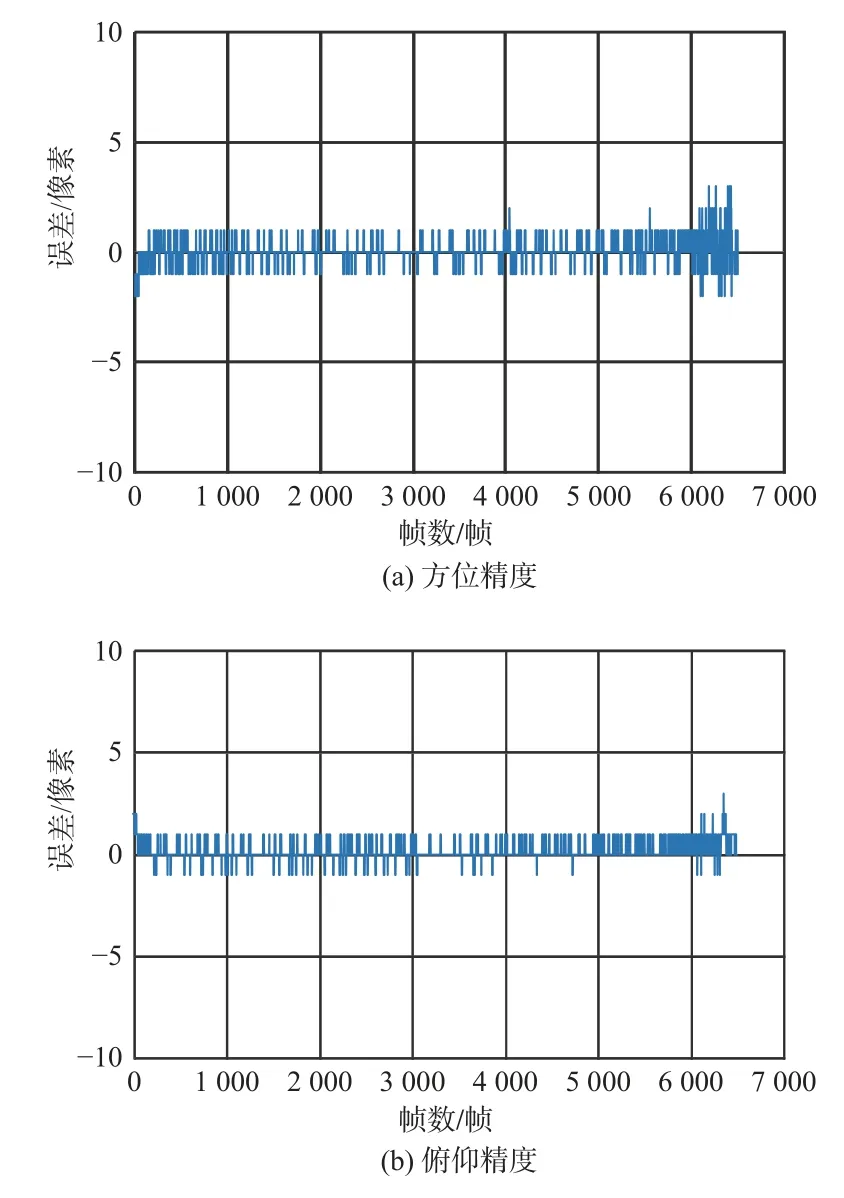
图9 第2 次跟踪精度Fig.9 The 2nd tracking accuracy
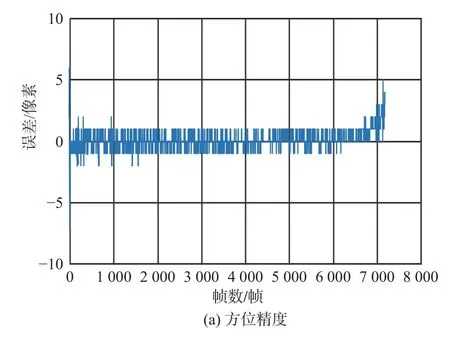
图10 第3 次跟踪精度Fig.10 The 3rd tracking accuracy
3 结论
本文针对掠海小目标在红外图像中成像对比度低,容易受到噪声、海面杂波等干扰,导致跟踪失败的问题,提出了一种基于海天线的红外弱小目标跟踪系统。在有目指信息时以目指为中心进行搜索,没有目指时启用海天线辅助判断。通过海天线划分出感兴趣区域,可以排除海天线区域外天空云层、雾霾、海浪、海鸟和海岸上背景等不必要的干扰信息,提高目标检测和跟踪的准确性。该算法只搜索海天线附近的区域,减少运算量,保证系统的实时性;对图像进行拉普拉斯滤波,提高信噪比,以海天线为界限,分别在海天线上下一定范围内搜索目标;搜索到目标后,对目标的位置、亮度、大小等信息进行多帧统计,最终得到真正的目标,进行目标跟踪。实验结果表明,该算法可以很好地检测出海天线,并能以海天线为参考进行准确的目标检测和跟踪,有效地提高光电跟踪仪的性能,具有一定参考价值。
