初速度不为零的平面欠驱动机械系统稳定控制
2024-02-13黄自鑫侯梦毓秦翔宇王乐君







摘 要:针对末端被动关节初速度不为零的平面多连杆欠驱动机械臂系统稳定控制问题,提出了一种基于模型降阶和开环迭代控制的控制策略。根据平面多连杆欠驱动机械臂的结构特点,采用模型降阶的方法,将原来的平面多连杆欠驱动系统降阶为平面虚拟两连杆欠驱动系统。根据降阶后平面虚拟两连杆欠驱动系统具有的幂零近似特性,设计了一种开环迭代控制器,控制该平面虚拟两连杆欠驱动系统到达目标状态。同时,平面多连杆欠驱动机械臂末端点也被控制到目标位置。最后,选择了不同结构参数的平面多连杆欠驱动机械臂系统进行仿真实验,实验结果验证了所提控制方法的有效性。
关键词:非线性系统; 平面欠驱动机械臂; 幂零近似; 模型降阶; 开环迭代; 稳定控制
DOI:10.15938/j.jhust.2024.05.012
中图分类号: TP242;TP273
文献标志码: A
文章编号: 1007-2683(2024)05-0105-09
Stable Control Strategy for Planar Multi-link Underactuated Mechanical System with Non-zero Initial Velocity
HUANG Zixin1,2, HOU Mengyu1, QIN Xiangyu1, WANG Lejun3
(1.School of Electrical and Information Engineering, Wuhan Institute of Technology, Wuhan 430205, China;
2.Hubei Key Laboratory of Digital Textile Equipment, Wuhan Textile University, Wuhan 430200, China;
3.Chongqing Key Laboratory of Complex Systems and Bionic Control,Chongqing University
of Posts and Telecommunications,Chongqing 400065, China)
Abstract:Aiming at the stability control problem of planar multi-link underactuated manipulator system with non-zero initial velocity of last passive joint, a stable control strategy based on model reduction and open-loop iterative control is presented. According to the structural characteristic of this planar multi-link underactuated system, the original system model is reduced to a planar virtual two-link underactuated system by using the method of model reduction. Considering the existence of the nilpotent approximation characteristic of the reduced system, the open iterative controllers are designed to drive this planar virtual two-link underactuated system to its target states. At the same time, the end joint of planar multi-link underactuated manipulator also reaches its target position. Finally, the planar multi-link underactuated manipulator system with different structural parameters is selected for simulation experiments. The experimental results verify the effectiveness of the proposed control method.
Keywords:nonlinear system; planar underactuated manipulator; nilpotent approximation; model reduction; open-loop iterative; stable control
0 引 言
相对于全驱动机械系统[1-2],欠驱动机械系统的控制输入数目少于系统的运动自由度[3-5],且该系统具有质量轻、能耗低等方面的优势[6-8],受到学者们持续密切地关注。同时,欠驱动机械系统还具有不同的非完整约束特性,使得其稳定控制具有很大的挑战性[9-11]。
平面欠驱动机械臂是一类典型的欠驱动机械系统,该系统忽略系统重力的影响。根据平面欠驱动机械臂不同的结构特点,当被动关节处于不同位置时,该类系统分别具有一阶非完整、二阶非完整等特性[12-13]。实际工作中,机械臂系统的末端驱动关节使用频率相对于其他驱动关节更高,其出现故障概率相对更大。所有末端关节为被动的平面欠驱动机械臂都具有的二阶非完整积分特性和角加速度约束关系[14-15],均属于二阶非完整系统。当系统的末端关节失效时,会使得系统无法正常工作,带来不利的影响和巨大的损失。当被动关节处于系统其余位置时,根据系统驱动连杆和欠驱动连杆之间的角度或角速度约束关系,可以通过控制驱动连杆来实现对欠驱动连杆状态的控制。但是当被动关节处于系统末端时,该类系统驱动连杆和末端欠驱动连杆之间不存在角度和角速度的约束关系,无法通过控制驱动连杆的角度和角速度来控制末端欠驱动连杆的角度和角速度。因此,无法直接控制系统末端点的位置,导致这类系统的控制具有很大的难度。为了保证末端关节失效后,机械臂系统仍能继续正常工作,需对末端关节为被动的机械臂系统其控制策略展开研究。
平面Pendubot是具有末端被动关节的最简平面欠驱动机械臂,对该系统的控制研究开展较早且成果丰富。Luca等[16]就针对平面Pendubot系统特性,提出了一种基于迭代转向范式的稳定控制方法。文[17]对平面Pendubot系统特性进行详细地分析,并据此提出了一种稳定控制策略,通过仿真验证了该策略的有效性。文[18]提出的一种基于迭代方式的控制策略,将初始状态为零的平面Pendubot系统控制到其目标状态。Wu[19]等也针对该系统,提出了一种基于傅里叶变换和智能优化的控制策略,实现了系统从初始位置到目标位置的控制目标。
对于具有末端被动关节的平面AAP(active-active-passive)系统,何广平等[20]对该系统的特性进行了详细的理论分析,并发现当对系统其余驱动关节施加合适的控制力矩后,被动关节将作自由螺旋运动。吴方朋等[21]针对平面AAP系统,基于分层模糊控制思想,提出一种有效的控制策略来实现系统的位置控制目标。文[22]所提控制方法通过平面AAP系统驱动连杆和欠驱动连杆之间的配合运动来实现系统位置控制。文[23]提出了一种基于系统连杆运动轨迹规划和跟踪的位置控制方法。上述文献针对具有末端被动关节的平面Pendubot和平面AAP系统,所提控制方法都是基于系统欠驱动连杆初始速度为零的前提,但实际情况中,当驱动装置损毁或故障,驱动连杆退变为欠驱动连杆并作旋转运动时,欠驱动连杆的速度并不为零,针对这一情况,现存控制策略研究较少。
考虑到工作环境的复杂,平面欠驱动机械臂的连杆数目不断增多,使得系统的控制输入也不断增加。因此,平面多连杆欠驱动机械臂系统各个连杆之间的状态约束也更加复杂。系统的控制具有更大的难度。本文以具有末端被动关节的平面多连杆欠驱动机械臂为研究对象,针对该系统欠驱动连杆初速度不为零时的控制展开研究,提出了一种基于模型降阶和开环迭代控制的稳定控制方法。在实现平面系统所有连杆控制目标的同时,系统末端点也从任意初始位置运动到目标位置。根据欧拉-拉格朗日法建立系统的动力学模型,并对该系统进行降阶。然后基于迭代控制理论,设计控制器,分两个阶段分别实现对系统驱动连杆和欠驱动连杆的控制,从而实现系统控制目标。最后,利用智能优化算法中的差分进化算法[24-25]求取一组系统连杆目标角度,进行仿真实验验证所提控制方法的有效性。
1 系统建模与控制方案
1.1 动力学模型
具有末端被动关节的平面多连杆欠驱动机械臂——平面AnP,其系统结构如图1所示。前n个连杆为驱动连杆,最后一个连杆为欠驱动连杆;mi为第i(i=1,2,…,n+1)杆的质量;Li为第i杆的长度;li为第i杆的质心到前一关节的长度;Ji为第i杆的转动惯量;τi为施加在第i关节的力矩;(x,y)为末端点的坐标。
根据欧拉-拉格朗日法建立平面AnP系统的动力学方程:
M(q)+H(q,)=τ(1)
其中:q∈(n+1)×1为角度向量;τ∈R(n+1)×1为控制力矩。第(n+1)个连杆为欠驱动连杆,其控制力矩τn+1为0。M(q)∈R(n+1)(n+1)是惯性矩阵,具有正定性和对称性。
H(q,)=(q,)-(1/2)(TM(q))/q∈R(n+1)×1是科式力和离心力的结合矩阵。
令状态变量为X=[XT1 XT2]T,其中X1=q,X2=。可得到平面AnP系统的状态空间方程为
1=X2
2=F(X)+G(X)τ(2)
其中,
F(X)=f1f2…fn+1T=-M-1(q)H(q,)
G(X)=g11…g1(n+1)
g21…g2(n+1)
g(n+1)1…g(n+1)(n+1)=M-1(q)(3)
系统控制目标是将末端点从任意初始位置移动到目标位置。如图1,末端点的坐标可表示为
x=-∑n+1i=1Lisin∑ij=1qj
y=∑n+1i=1Licos∑ij=1qj(4)
根据式(4),系统控制目标为控制所有连杆到目标角度。由于该系统同一目标位置对应的各杆目标角度存在多解性,因此使用差分进化算法[26]得到一组优化目标角度。定义差分进化算法中的评价函数为
h=|x-xd|+|y-yd|(5)
其中(xd,yd)为系统末端点的目标位置。
1.2 降阶模型
当平面AnP系统驱动连杆保持在各自目标角度时,被动关节保持在一个确定的位置,欠驱动连杆会自由旋转。此时,平面AnP系统降阶成为平面虚拟Pendubot,平面AnP系统第n、n+1个连杆分别为平面虚拟Pendubot的驱动连杆与欠驱动连杆。
平面虚拟Pendubot的动力学模型为
()¨+(,·)=(6)
其中,
()=1112
2122
(,·)=1(,·)
2(,·)(7)
=[12]T ·=[·1·2]T=[10]T(8)
11=b1+b2+2b3cos2
12=21=b2+b3cos2
22=b2
1=-b3(2·1·2+(·2)2)sin2
2=b3(·1)2sin2(9)
b1=mnl2n+mn+1L2n+Jn
b2=mn+1l2n+1+Jn+1
b3=mn+1Lnln+1(10)
平面虚拟Pendubot的约束方程为
21¨1+22¨2+2=0(11)
令¨1=u为辅助控制输入,可得:
¨1=u
¨2=--1222--12221u(12)
令=[12·1·2]T,平面虚拟Pendubot的状态方程可写为如下形式:
·=·1
·2
0
-Nsin2(·1)2+
001
-(1+Ncos2)u=
()+()u(13)
其中N=b3/b2。
1.3 控制方案
基于平面虚拟Pendubot的幂零近似特性,平面AnP系统的控制被分为两个阶段:
1)平面AnP系统模型降阶
控制平面AnP系统所有驱动连杆到达目标角度,并使平面AnP系统前n-1个连杆保持在目标角度,将系统的第n、n+1个连杆分别作为降阶后系统的驱动连杆与欠驱动连杆,则平面AnP系统降阶为平面虚拟Pendubot。
2)平面AnP系统位置控制
当平面AnP系统完成模型退化阶段后,将平面虚拟Pendubot的驱动连杆控制到其目标角度,使得其欠驱动连杆按照设计的开环迭代控制器稳定到目标角度,则平面AnP系统末端点到达目标位置,实现平面AnP系统的位置控制。
2 控制器设计
2.1 第一阶段控制器设计
根据第一阶段控制目标,设计Lyapunov函数如下:
V1(X)=∑ni=1Pi2(xi-xid)2+12x22i(14)
其中:Pi为一个正常数;xid=qid代表各驱动连杆的目标角度。
V1(X)的导数为
V·1(X)=∑ni=1x2i(Pi(xi-xid)+fi+Giτi)(15)
其中Gi=[gi1gi2…gin]。
为了确保V·1(X)≤0,设计控制器为
τi=-(Pi(xi-xid)+fi+Dix2i+Tj)g-1ii
Tj=∑nj=1,j≠igijτj(16)
其中Di为正常数。
显然,式(16)保证了:
V·1(X)=-∑ni=1Dix22i≤0(17)
将式(16)代入式(2)可得到闭环系统:
X·=Fa(X)(18)
设Ψ1为式(18)的不变集:
Ψ1={X∈瘙綆2n|V·1=0}(19)
式(19)的最大不变集为
M1={X∈Ψ1|xi=xid,x2i=0}(20)
根据LaSalle不变原理,当t→∞时,式(18)的每个解X都会收敛到最大不变集M1。
定义条件Sa为
Sa∶=|xi-xid|≤e1
|x2i|≤e2(21)
其中e1、e2为很小的正数。
当系统所有驱动连杆状态都满足条件Sa时,表明平面AnP系统所有驱动连杆的运动状态都到达了控制目标。同时,原始的平面AnP系统也被降阶为平面虚拟Pendubot。此时,第一阶段的控制目标完成,该时刻记为t1。
2.2 第二阶段控制器设计
根据式(6)和式(12),可以得到:
1=(M~11-M~12M~-122M~21)u+H~1-M~12M~-122H~2(22)
根据文[16]所提出的方法,可以计算得到平面虚拟Pendubot的幂零近似模型。根据向量场和向量场李括号{,,[,],[,[,]]}构造可达矩阵,并进行坐标转化得到系统在[0102·01·02]的特权坐标。
1=01-z3(a)
2=02+·02z1+αz3(b)
·1=z2(c)
·2=·02-αz2+βz3-γz4+βz1z2(d)(23)
其中:
α=1+Ncos02, β=N·02sin02, γ=N2sin202。
平面虚拟Pendubot的幂零近似模型为
1=1(a)
2=u(b)
3=-z2(c)
4=z222ρ1-(·02)2z214ρ2+αz32ρ1u(d)(24)
其中:ρ1=Ncos02 ,ρ2=Nsin02。
利用幂零近似模型(24)等效替代系统模型(13)来计算控制输入。在系统经历了一个周期循环控制之后,第一连杆的位置应该返回到(1d,0)。因此,根据¨1=u,u应该满足以下条件:
∫T0u(t)dt=0,∫T0∫t0u(τ)dτdt=0(25)
通过式(24b),(24c),以及式(25),可以得到:
z2(T)=∫T0u(t)dt=0(a)
z3(T)=-∫T0∫t0u(τ)dτdt=0(b)(26)
根据式(23b)和(26b),我们可以得到被动关节在第一个周期(k=1)的角度误差。
Δ2=12-02=·02z1(T)=·02T(27)
根据式(24a)可得:z1(t)=∫T01dt=T,式(27)表明2不依赖于控制输入,但是依赖于·02。
根据式(23d)以及(26),我们可以得到被动关节在第一个周期(k=1)的角速度误差。
Δ·2=·12-·02=-γz4(T)(28)
根据式(24d),我们能得到:
z4(T)=∫T012Ncos02z22(t)dt-
∫T0(·02)24Nsin02z21(t)+α2Ncos02z3(t)u(t)dt(29)
利用分部积分法,我们可以得到:
∫T0z21(t)u(t)dt=-2∫T0z3(t)dt(30)
∫T0z3(t)u(t)dt=∫T0z22(t)dt(31)
根据式(28)至式(31),可得:
Δ·2=N2sin02cos02∫T0z22(t)dt-
Ncos02(·02)2∫T0z3(t)dt(32)
式中:N2sin02cos02∫T0z22(t)dt的符号由02决定;Ncos02(·02)2∫T0z3(t)dt的符号由(·02)2决定。
辅助控制输入u(t)设计为如下形式:
u(t)=-Acos4πtT,t∈0,T2
Acos4πt-T2T,t∈T2,T(33)
其中A为控制输入u(t)的振幅。
根据式(24b)和(24c),可得3=-u,因此:
∫T0z3(t)dt=∫T0∫t0∫σ0u(ρ)dρdσdt=0(34)
∫T0z22(t)dt=∫T0(∫t0u(σ)dσ)2dt=T332π2A2(35)
根据式(32)、(34)和(35),可得:
Δ·2=A2T3N264π2sin202(36)
上式表明,Δ·2与sin202同号。
为了保证第二根连杆在每个迭代周期之后都越来越接近给定值,给出第一个周期的收敛关系,如下所示:
|d2-12|≤η1|d2-02|(37)
|·12|≤η2|·02|(38)
其中η1,η2∈[0,1),为收敛系数。
在不失一般性的前提下,假设:
d2-12=η1(d2-02)(39)
·12=η2·02(40)
根据式(27)和(39),我们得到:
T=(1-η1)d2-02·02,0≤η1lt;1(41)
由于Tgt;0,当式(41)成立时,以下条件应该满足:
02lt;d2
·02gt;0 or
02gt;d2
·02lt;0(42)
根据式(28)、(36)以及(40),可得:
A=8πNT·02(η2-1)Tsin202, 0≤η2lt;1(43)
为了确保式(43)中平方根为正,需要满足以下条件:
·02lt;0∶02∈Q1
02∈Q3,·02gt;0∶02∈Q2
02∈Q4(44)
其中Qi(i=1,2,3,4)分别为第i个象限。
将式(42)和(44)结合,能得到如下四种条件。只要满足其中一个,就能通过式(41)以及式(43)实现平面虚拟Pendubot的稳定控制。
d2∈Q1,02∈Q1, 02gt;d2,·02lt;0(a)
d2∈Q2,02∈Q2, 02lt;d2,·02gt;0(b)
d2∈Q3,02∈Q3, 02gt;d2,·02lt;0(c)
d2∈Q4,02∈Q4, 02lt;d2,·02gt;0(d)(45)
定义Sb∶=(45a)∪(45b)∪(45c)∪(45d)。当系统满足条件Sb时,我们可以利用控制器(20)持续的进行迭代操作以完成平面虚拟Pendubot的稳定控制。
为了保证该系统降阶为平面虚拟Pendubot并实现其稳定控制,当切换条件S1∶=Sa∪Sb满足时,控制器应该从式(16)转换至式(22)。
根据状态方程(13),可以采用迭代操作方法使平面虚拟Pendubot的两连杆角速度都为零,同时保证在每个迭代周期内第一根驱动连杆的初始状态与最后时刻的状态相同。
定义每个迭代周期为T,迭代周期的初始时刻为0=t1,平面虚拟Pendubot的初始状态为
0=x(t1)=[0102·01·02]=[q11q12012](46)
其中q11=qd1。
当平面虚拟Pendubot稳定时,定义该时刻为m=t2,状态为m=x(t2)。
m=[m1m200]=[qd1qd200](47)
基于上述定义,给出迭代操作算法基本流程为:
步骤1 设置0=t1,t2-t1=mT,k=0+kT和k=1,…,m。定义为第k个迭代周期的状态。k应该比k-1更接近m。
步骤2 控制平面虚拟系统到k,k从1到m。
步骤3 迭代开环控制律u(k+1)根据u(k)得到;当[k,k+1]时,系统状态再从k到k+1。一般情形下,k≠m。
步骤4 设置k+1=k+T。如果k+1=m,则迭代操作完成,否则,返回至步骤2。
3 仿真实验分析
为验证所提控制方法有效性,在本节选择合适的参数和对象来进行仿真实验。这里,以平面AAAP(active-active-active-passive)系统为实验对象进行仿真。平面AAAP系统的模型参数选择如表1所示。
选择驱动连杆对应的控制器(16)参数为:Pi=1.0、Di=1.8,式(21)的参数为:e1=e2=10-4。
设平面AAAP系统所有连杆的初始角度、初始角速度以及末端关节的目标位置为
[q10,q20,q30,q40]=[-1.0, 0.8, -1.3, -0.4](rad)
[10,20,30,40]=[0, 0, 0, 0.1](rad/s)
(xd, yd)=(2.0, 1.5)(m)(48)
其中,平面AAAP系统末端欠驱动连杆的初始速度不为零。
将差分进化算法的参数分别设置为pm=0.3,pc=0.7和η1=0.0001。通过差分进化算法,可以得到优化后平面AAAP系统各驱动连杆和欠驱动连杆对应的目标角度为
q1d=-1.0254(rad)
q2d= 1.3009(rad)
q3d=-1.1056(rad)
q4d=-0.9995(rad)(49)
仿真实验的结果如图2所示。
由图2可见,在t=0s时,平面AAAP系统驱动连杆速度为零,欠驱动连杆的初始角速度不为零,系统输入的力矩也为零。然后,控制器控制系统驱动连杆运动,其速度和角度不断变化。在t=20s时,所有驱动连杆皆稳定在其目标角度,并且末端欠驱动连杆以恒定的角速度做旋转运动。在20s≤t≤41s内,保持前两根连杆在其目标角度,此时原系统被降阶为平面虚拟Pendubot。通过控制平面虚拟Pendubot系统,实现对末端欠驱动连杆的控制。在t=41s时,末端连杆稳定在其目标角度q4d=-0.9995rad,该平面AAAP系统的末端点也被控到其目标位置。仿真结果证明本文所提控制方法的有效性。
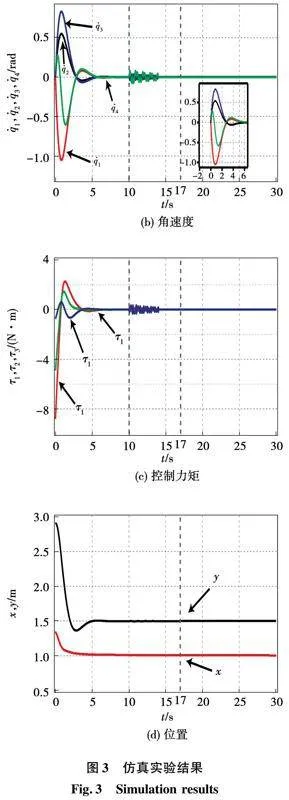
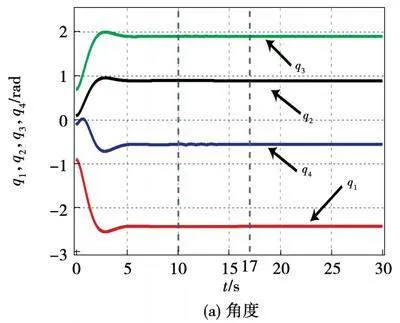
为了进一步说明本文所提控制方法对欠驱动连杆初始速度不为零时系统控制的有效性,这里进行第2组仿真,除欠驱动连杆初始速度外,其余仿真参数值选取与文[27]相同,当欠驱动连杆初速度取非零值(40=0.1rad/s),仿真结果如图3所示。
由图3可知,在t=0s时,平面AAAP系统驱动连杆速度皆为零,末端欠驱动连杆的初始角速度为0.1rad/s时,控制输入的力矩也为零。随着控制器输入参数的改变,系统驱动连杆开始运动,其速度和角度不断变化,在t=10s时稳定在其目标角度。在10s≤t≤17s内,稳定第1、2连杆在其目标状态,通过控制第3连杆目标状态出发最终回到目标状态,实现对欠驱动连杆的控制。在t=17s时,末端连杆稳定在其目标角度,系统的末端点也被控到其目标位置。上述结果证明当欠驱动初速度不为零,本文所提控制策略可将系统各个连杆和末端点从与文[27]相同的初始状态控制到相同的目标状态。充分证明了本文所提控制策略的有效性。
4 结 论
本文针对末端被动关节初速度不为零的平面多连杆欠驱动机械臂,提出了一种基于模型降阶和开环迭代控制的位置控制策略,实现系统末端点的稳定控制目标。根据平面多连杆欠驱动机械臂的结构特点,基于模型降阶方法,将原系统降阶为平面虚拟Pendubot。然后,根据平面虚拟Pendubot具有的幂零近似特性和开环迭代控制方法,实现对平面虚拟Pendubot系统的控制,从而实现了对原始系统驱动连杆和欠驱动连杆的控制目标。同时,原始系统的末端点也将被控到达目标位置。最后,通过仿真验证了该控制策略的有效性。
参 考 文 献:
[1] 李克讷, 杨津, 徐剑琴, 等. 机械臂初始位置误差的容错运动规划[J]. 哈尔滨理工大学学报, 2020, 25(1): 93.
LI Kene, YANG Jin, Xu Jianqin, et al. Fault-Tolerant Motion Planning with Initial Position Error of Manipulator[J]. Journal of Harbin University of Science and Technology, 2020, 25(1): 93.
[2] 王卫兵, 张霁, 徐倩. 一种六轴焊接机械手运动学分析[J]. 哈尔滨理工大学学报, 2019, 24(6): 125.
WANG Weibing, ZHANG Ji, XU Qian. Kinematics Analysis of a Six-axis Welding Manipulator[J]. Journal of Harbin University of Science and Technology, 2019, 24(6): 125.
[3] 王亚午, 赖旭芝, 吴敏. 基于可变设计参数的平面Acrobot位置快速控制方法[J]. 电机与控制学报, 2017, 21(9): 110.
WANG Yawu, LAI Xuzhi, WU Min.Rapid Position Control Approach Based on Variable Design Parameter for Planar Acrobot[J]. Electric Machines and Control, 2017, 21(9): 110.
[4] 王岳, 孙宁, 吴易鸣, 等. 深海起重机系统的实时轨迹规划方法[J]. 自动化学报, 2021, 47(12): 2761.
WANG Yue, SUN Ning, WU Yiming, et al. Real-Time Motion Planning of Deep Sea-Oriented Flexible Crane Systems[J]. Acta Automatica Sinica, 2021, 47(12): 2761.
[5] HUANG Zixin, LAI Xuzhi, ZHANG Pan, et al. Virtual Model Reduction-Based Control Strategy of Planar Three-link Underactuated Manipulator with Middle Passive Joint[J]. International Journal of Control, Automation and Systems, 2021, 19(1): 29.
[6] 黄自鑫, 秦翔宇, 陈振, 等. 基于智能优化算法的欠驱动机械臂位姿控制[J]. 控制工程, 2022, 29(11): 1948.
HUANG Zixin, QIN Xiangyu, CHEN Zhen, et al. Position-Posture Control of Planar Underactuated Manipulator Based on Intelligent Optimization Algorithm[J]. Control Engineer of China, 2022, 29(11): 1948.
[7] 黄自鑫, 秦翔宇, 王乐君. 二阶非完整平面欠驱动机械系统的位置控制[J]. 武汉工程大学学报, 2021, 43(5): 567.
HUANG Zixin, QIN Xiangyu, WANG Lejun.Position Control of Second-Order Nonholonomic Planar Underactuated Mechanical System[J]. Journal of Wuhan Institute of Technology, 2021, 43(5): 567.
[8] HUANG Zixin, ZHOU Yaosheng, CHEN Zhen, et al. An Universal Control Strategy for Planar 2-DoF Underactuated Manipulator with One Passive Joint[C]. 40th Chinese Control Conference, Shanghai, China, 2021: 468.
[9] ZHANG Ancai, SHE Jinhua, QIU Jianlong, et al. Design of Motion Trajectory and Tracking Control for Underactuated Cart-Pendulum System[J]. International Journal of Robust and Nonlinear Control, 2019, 29(8): 2458.
[10]范云生, 陈欣宇, 赵永生, 等. 基于扩张状态观测器的四旋翼吊挂飞行系统非线性控制[J]. 自动化学报,2023, 49(8): 1758.
FAN Yunsheng, CHEN Xinyu, ZHAO Yongsheng, et al. Nonlinear Control of Quadrotor Suspension System Based on Extended State Observer[J]. Acta Automatica Sinica, 2023, 49(8): 1758.
[11]黄自鑫, 侯梦毓, 危少奇, 等. 平面Acrobot和Pendubot的统一控制策略[J]. 深圳大学学报(理工版), 2023, 40(3): 275.
HUANG Zixin, HOU Mengyu, Wei Shaoqi, et al. The Unified Control Strategy for Planar Acrobot and Pendubot[J]. Journal of Shenzhen University Science and Engineering, 2023, 40(3): 275.
[12]黄自鑫, 王乐君. 一类平面欠驱动机械系统控制方法综述[J]. 武汉工程大学学报, 2021, 43(4): 448.
HUANG Zixin, WANG Lejun. Review of Control Method of Planar Underactuated Mechanical System[J]. Journal of Wuhan Institute of Technology, 2021, 43(4): 448.
[13]HUANG Zixin, WEI Shaoqi, CHEN Yanfei, et al. Motion Planning and Tracking Control of Space Underactuated Manipulator via Intelligent Algorithm[C]. China Automation Congress. Yunnan, China, 2021: 2190.
[14]黄自鑫, 赖旭芝, 王亚午, 等. 基于轨迹规划的平面三连杆欠驱动机械臂位置控制[J]. 控制与决策, 2020, 35(2): 382.
HUANG Zixin, LAI Xuzhi, WANG Yawu, et al. Position Control of Planar Three-Link Underactuated Manipulator Based on Trajectory Planning[J]. Control and Decision, 2020, 35(2): 382.
[15]XIONG Peiyin, LAI Xuzhi, WU Min. A Stable Control for Second-Order Nonholonomic Planar Underactuated Mechanical System: Energy Attenuation Approach[J]. International Journal of Control, 2018, 91(7): 1630.
[16]LUCA Alessandro De, MATTONE Raffaella, ORIOLO Giuseppe. Stabilization of An Underactuated Planar 2R Manipulator[J]. International Journal of Robust and Nonlinear Control, 2000, 10(4): 181.
[17]HE Guangping, WANG Zhilv, ZHANG Jie, et al. Characteristics Analysis and Stabilization of A Planar 2R Underactuated Manipulator[J]. Robotica, 2016, 34(3): 584.
[18]HUANG Zixin, LAI Xuzhi. Control Strategy Based on Iterative Method for Planar Pendubot[C]//37th Chinese Control Conference, Wuhan, China, 2018: 858.
[19]WU Jundong, WANG Yawu, YE Wenjun, et al. Control Strategy Based on Fourier Transformation and Intelligent Optimization for Planar Pendubot[J]. Information Sciences, 2019, 491: 279.
[20]何广平, 陆震, 王凤翔. 平面三连杆欠驱动机械臂谐波函数控制方法[J]. 航空学报, 2004, 25(5): 520.
HE Guangping, LU Zhen, WANG Fengxiang. Harmonic Function Control of Planar 3-DOF Underactuated Manipulator[J]. Acta Aeronautica et Astronautica Sinica, 2004, 25(5): 520.
[21]吴方朋, 余跃庆. 平面三自由度欠驱动机器人末端的位置控制[J]. 组合机床与自动化加工技术, 2016(8): 111.
WU Fangpeng, YU Yueqing. Position Control of The Endpoint of Three-DOF Planar Underactuated Robots[J]. Modular Machine Tool amp; Automatic Manufacturing Technique, 2016(8): 111.
[22]任志全, 余跃庆, 周军. 水平运动的三自由度欠驱动机器人的位置控制[J]. 机器人, 2010, 32(6): 741.
REN Zhiquan, YU Yueqing, ZHOU Jun. Position Control of A 3-DOF Horizontal Underactuated Robot[J]. Robot, 2010, 32(6): 741.
[23]刘庆波, 余跃庆, 苏丽颖. 欠驱动机器人最优运动轨迹生成与跟踪控制[J]. 机械工程学报, 2009, 45(12): 15.
LIU Qingbo,YU Yueqing, SU Liying. Optimal Path Planning and Trajectory Tracking of Underactuated Robots[J]. Journal of Mechanical Engineering, 2009, 45(12): 15.
[24]张子恒, 吴定会, 杨朝辉, 等. 基于改进差分进化算法的微网容量优化配置[J]. 控制工程, 2023, 30(1): 90.
ZHANG Ziheng, WU Dinghui, YANG Zhaohui, et al. Optimal Configuration of Microgrid Capacity Based on Improved Differential Evolution Algorithm[J]. Control Engineering of China, 2023, 30(1): 90.
[25]程强, 高元杰, 初红艳, 等. 基于多目标差分进化算法的机加工柔性作业车间调度[J]. 北京工业大学学报, 2023, 49(3): 335.
CHENG Qiang, GAO Yuanjie, CHU Hongyan, et al. Flexible Job Shop Scheduling Based on Multi-Objective Differential Evolution Algorithm[J]. Journal of Beijing University of Technology, 2023, 49(3): 335.
[26]YANG Ming, LI Changhe, CAI Zhihua, et al. Differential Evolution with Auto-Enhanced Population Diversity[J]. IEEE Transactions on Cybernetics, 2015, 45(2): 341.
[27]HUANG Zixin, HOU Mengyu, WEI Ziang, et al. A Consecutive Control Strategy Based on Quadratic Differentiable Trajectory for Plane Multi-DoF Underactuated Manipulator with Last Passive Joint[C]// IEEE International Conference on Industrial Cyber-Physical Systems, Wuhan, China, 2023: 1.
(编辑:温泽宇)
基金项目: 湖北省自然科学基金(2023AFB380);智能机器人湖北省重点实验室创新基金(HBIRL202301);湖北省数字化纺织装备重点实验室开放课题(KDTL2022003).
作者简介:黄自鑫(1988—),男,博士,副教授;
侯梦毓(2001—),女,硕士研究生.
通信作者:王乐君(1991—),男,博士,讲师,E-mail:wanglj@cqupt.edu.cn.
