基于精确定位技术的无轨胶轮车超员报警检测
2024-02-12韩燕南
韩燕南
(1.中煤科工集团常州研究院有限公司,江苏 常州 213015;2.天地(常州)自动化股份有限公司,江苏 常州 213015)
辅助运输是井工煤矿生产的必要环节,其主要任务是实现设备、材料及人员在地面与井下工作面之间,以及井下各工作点之间的运输[1-2]。无轨胶轮车作为辅助运输重要的运输手段之一[3],在《智能化示范煤矿验收管理办法(试行版)》文件中已明确无轨胶轮车管理系统须具备车辆运行状态参数监测、智能安全预警、车辆精确定位等要求[4-6]。车辆超员报警检测已属于验收必备功能。
近年来,众多学者对矿井无轨胶轮车管理系统进行了大量研究。文献[7]基于交通信号、视频图像、位置信息等关联数据采集分析处理实现车辆智能调度管理;文献[8-9]结合车辆位置数据与红绿灯控制技术,实现了矿井车辆的信息化管理;文献[10-11]采用超高频RFID 模块识别乘车人员信息,超宽带UWB 模块调整输出发射功率结合的方式,实时统计车辆内载人数量,避免出现漏识别。
虽然矿井无轨胶轮车管理系统的研究取得了众多成果,但在车辆超员报警检测方面的研究较少。为此,设计了一种基于精确定位技术的车辆超员报警检测方法。首先,将UWB 基站输出的测距数据转换为三维坐标,减少轨迹数据对基站的依赖,形成连续性轨迹;其次,根据车辆(含乘车人员)行进过程中的物理特征,采用相邻时刻的定位数据确定行进方向向量,并执行轨迹预处理;再次,采用动态时间规整(DTW)算法执行车辆与乘车人员轨迹对齐,求解最佳路径,获取度量值;最后,人员轨迹与司机轨迹样本做匹配,确定人员是否为乘车人员,以及车辆是否超员。此方法在某矿进行了实验验证,证明了所提方法的可行性和有效性。
1 系统架构
系统架构由物理架构和软件模块组成。物理架构负责采集车辆实时位置,软件模块负责根据车辆实时位置,计算轨迹相似度,最终得出车辆是否超员的结果。
1.1 物理架构
物理部署架构示意图如图1。
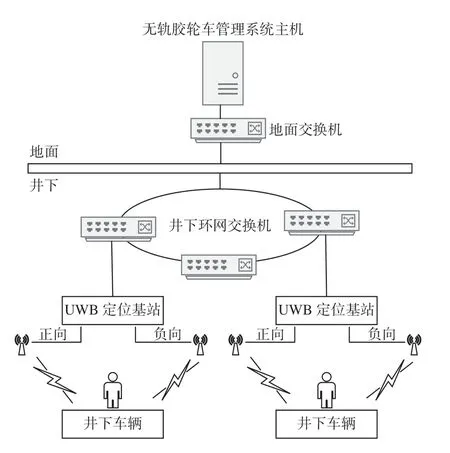
图1 物理部署架构示意图Fig.1 Physical deployment architecture diagram
物理架构可分为井上和井下2 部分。井上由无轨胶轮车管理系统主机和地面交换机组成,负责承载软件运行平台;井下部分由UWB 定位基站、井下环网交换机、井下车辆、车辆及人员识别卡组成,负责车辆、驾乘车人员的精确位置采集;井下和井下的交换机负责网络通信传输。
1.2 软件模块
软件模块主要由轨迹生成、轨迹预处理、轨迹相似度度量和轨迹匹配组成。软件模块处理流程如图2。

图2 软件模块处理流程Fig.2 Software module processing flow
1)轨迹生成。基站输出的测距信息属于相对定位模式,即其“作用域”仅在当前基站范围内有效,各基站间输出的测距信息无逻辑关联。利用三维空间转换算法,将测距信息转换为三维坐标,从而形成连续性轨迹。
2)轨迹预处理。受UWB 基站布置位置、多径效应、非视距误差等对定位精确的影响,其定位结果具有一定的波动性。利用车辆及司乘人员在行进过程中定位数据应呈现线性关系的物理特征,采用相邻时刻的位置数据生成行进方向向量,并依此执行轨迹预处理。以保留轨迹整体趋势,避免因干扰因素造成的误判,提高方法整体的鲁棒性。
3)轨迹相似度度量。受车辆与司乘人员轨迹采样频率不同影响,2 种对象的轨迹数据为2 个时间序列,采用动态时间规整(DTW)算法对其进行“拉伸”或“压缩”后,构建累计距离矩阵,求解最佳路径,求得相似度度量值。
4)轨迹匹配。构建司机轨迹度量值样本空间,衡量人员轨迹与样本空间的匹配程度。当人员的度量值处于标准差范围内,系统判定为乘车人员,再根据车辆基础配置信息,判定车辆是否超员。
2 具体实现
2.1 轨迹生成
车辆及人员的定位数据是由当前基站的测距信息确定的,不同基站产生的测距信息之间无任何关联性。利用以下空间转换算法,将基站的测距信息转换为三维坐标,生成面向整个矿井的、连续性的轨迹数据。定位基站测距典型场景如图3。图中:D 为定位基站;M 为移动目标;a为定位基站负方向中线点;b为定位基站正方向中线点;L为定位基站至正方向中线点距离;Lc为移动目标至定位基站距离。
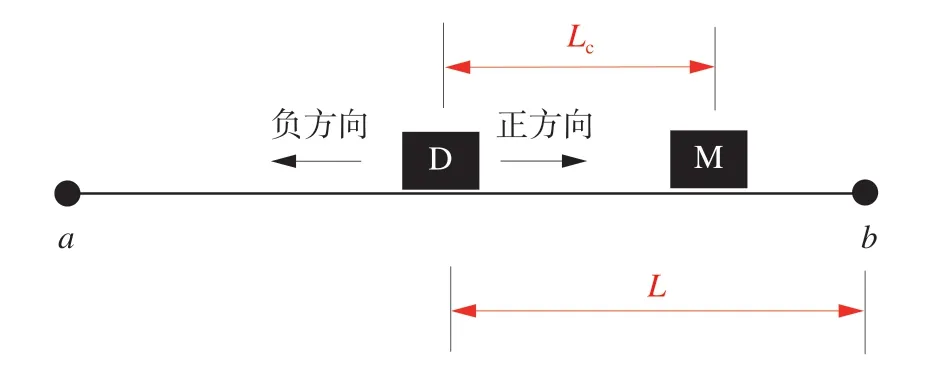
图3 定位基站测距典型场景Fig.3 Typical scene of positioning base station ranging
移动目标在L距离下的比值r可由式(1)计算:
式中:(xd,yd,zd) 为定位基站坐标;(xb,yb,zb)为正方向b点坐标;Lc为定位基站输出的测距距离。
移动目标坐标由式(2)计算:
式中:(xm,ym,zm)为移动目标坐标。
将移动目标坐标存储至FIFO 轨迹队列中,队列结构为如图4,队列元素的数据结构如图5。

图4 队列结构Fig.4 Queue structure
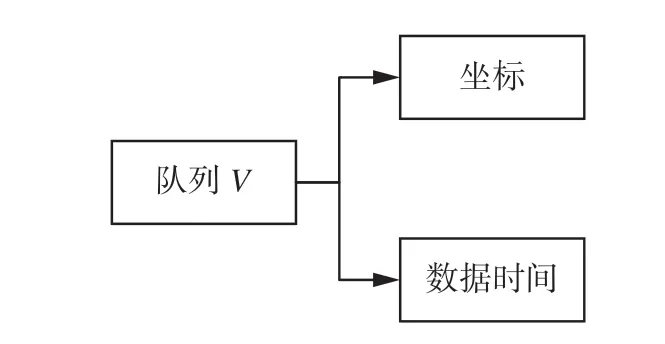
图5 队列元素数据结构Fig.5 Queue element data structure
2.2 轨迹预处理
受井下巷道断面空间限制,车辆及司乘人员轨迹应具有单向性,车辆及司乘人员行进示意图如图6,图中:D 为定位基站;M1、M2、M3为移动目标经过定位基站时的位置。车辆及司乘人员行进轨迹曲线示意图如图7。

图6 车辆及司乘人员行进示意图Fig.6 Vehicle and driver-passenger moving diagram
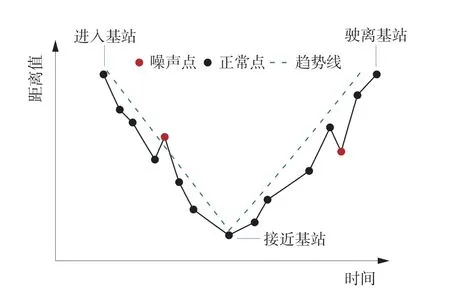
图7 车辆及司乘人员行进轨迹曲线示意图Fig.7 Vehicle and driver-occupant trajectory curve diagram
由图6 观察可得,轨迹曲线应呈现线性关系的物理特征。
由图7 从轨迹曲线来看:车辆首次进入基站信号覆盖范围时,距离值最远;当车辆及司乘人员接近基站时,距离值趋于0;当驶离基站时,距离值再次变大。受UWB 布置位置、多径效应、非视距误差等对定位精确的影响,UWB 定位结果具有一定波动性。车辆行进至红色处时将产生轨迹调头现象,但从实际现场情况来看,车辆是难以在短时间内完成调头动作,因此红色点可以判定为噪声点。另外,从曲线的整体趋势来看,轨迹曲线呈现“V”字形,进一步证实了红色为噪声点的判断。
因此,利用此物理特征,采用相邻时刻的位置数据生成行进方向向量,并依此执行轨迹数据预处理。
轨迹向量选择如图8,图中:a、b为相邻时刻轨迹点;c、d、e、···、j为下一时刻轨迹点(潜在点)。

图8 轨迹向量选择Fig.8 Trajectory vector selection
相邻时刻轨迹点ab生成的空间向量为,下一时刻的轨迹点构建的潜在空间向量为。根据图8 可 得:和向 量与原始向 量方向相反,即潜在轨迹点f点与g点为噪声点。
式 中:(xba,yba,zba) 为向 量;(xcb,ycb,zcb) 为向量。
根据内积值的正负性,确定两向量方向。对应关系如下:
根据上述定义,当m<0时为噪声点。
2.3 轨迹相似度度量
因车辆与司乘人员轨迹采样频率不同,2 类对象的轨迹数据是属于不同时间序列。故采用动态时间规整(Dynamic Time Warping,DTW)算法对2 类对象的轨迹相似度进行度量。该算法是一种用于比较2 个时间序列相似度的算法,其主要思想是对数据进行“拉伸”或“压缩”后“对齐”,求解其中的最佳匹配路径,从而得到相似性度量值。
假设车辆轨迹时间序列为V={V1,V2,···,V6},司乘人员轨迹时间序列为P={P1,P2,···,P4},轨迹数据匹配示意图如图9,图中:头节点为V1→P1;尾节点为V6→P4;中间节点为V2→P2、V3→P2、V4→P2、V5→P3。
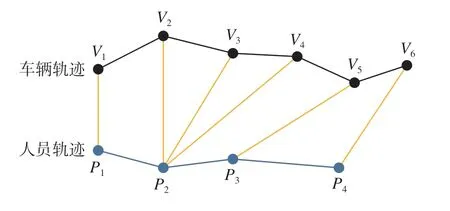
图9 轨迹数据匹配示意图Fig.9 Trajectory data matching diagram
度量过程分为:①构建累计矩阵;②路径回溯;③距离度量。
1)构建累计矩阵。结合先前的假设,构建4×6的矩阵D,对矩阵元素赋值。赋值后,形成累计矩阵示意图,累计矩阵示意图如图10。

图10 累计矩阵示意图Fig.10 Cumulative matrix diagram
式中:d为两点间的空间距离值;(xV,yV,zV)为V点坐标;(xP,yP,zP)为P点坐标。
2)路径回溯。路径回溯即求解最佳匹配路径过程。以右上角元素为起始点,与左、左下和下元素值进行比较,取最小值作为下1 次路径比对值。依此类推,完成整个矩阵从右上角至左下角的最佳匹配路径。比对方法如图11,最佳匹配路径示意图如图12。从示意图来看,最佳匹配路径为:[(V1 →P1),(V2 →P2),(V3 →P2),(V4 →P2),(V5 →P3),(V6 →P4)]。
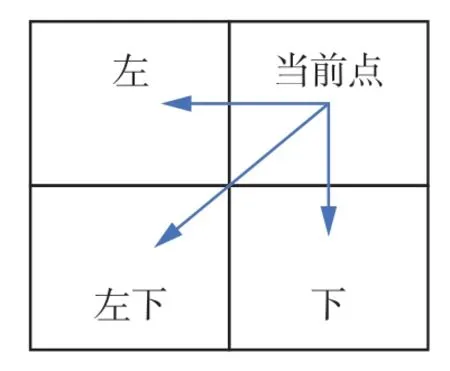
图11 比对方法Fig.11 Comparison strategy
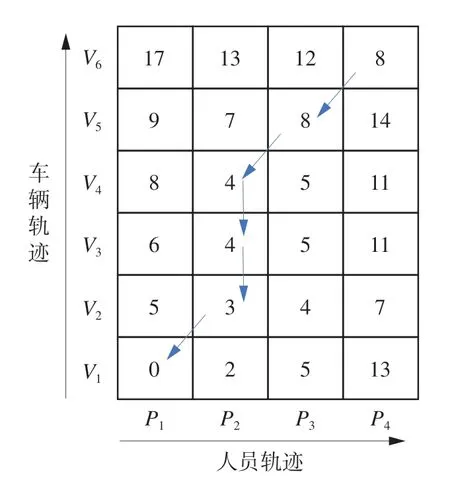
图12 最佳匹配路径示意图Fig.12 The best matching path diagram
3)距离度量。采用式(6)计算最佳匹配路径值distavg:
式中:disti(V,P)为 第i个 匹配对的空间距离;n为最佳匹配路径数量。
2.4 轨迹匹配
提取司机轨迹度量值作为样本,形成样本空间,以1 个标准差为相似度衡量范围,衡量人员轨迹与样本空间的相似程度,从而判定人员是否为乘车人员,再进一步根据车辆基础配置,判定此刻车辆是否超员。
轨迹匹配的工作流程如图13。
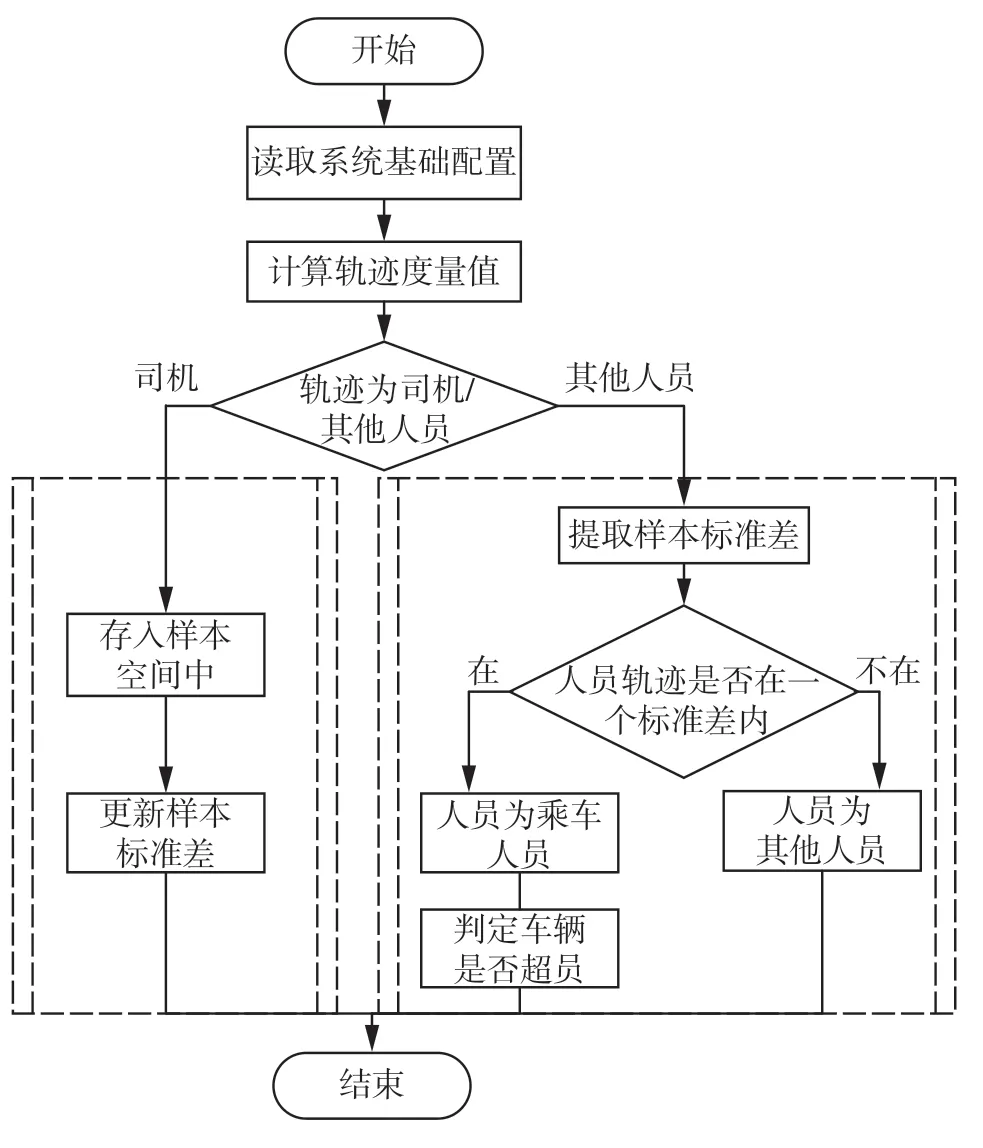
图13 轨迹匹配工作流程Fig.13 Trajectory matching workflow
1)第1 步。读取系统基础配置,包括人员、车辆标识卡号,司机与车辆的关系,车辆限员等配置信息。再根据基站输出的定位信息计算出人员与车辆的度量值。
2)第2 步。若轨迹为司机时,将度量值存入样本空间中,并更新样本空间的标准差。流程结束。若轨迹为其他人员时,进入下一判断流程。
3)第3 步。提取样本的标准差,判断人员轨迹是否在1 个标准差内,若在则判定为乘车人员,进而根据系统基础配置,判定车辆是否超员,若不在标准差内,则判定为人员为其他人员,流程结束。
以司机轨迹度量值为样本空间,设样本期望为 µ,其他人员轨迹度量值为随机变量X,通过大量数据观察发现:当X<µ时,人员为乘车人员概率逐渐增大;当X>µ时,概率逐渐变小;当X=µ 时,概率最大。故推断出随机变量X服从参数为 µ 和 σ2的正态分布。其中:σ2为方差;σ为标准差。根据正态分布特征,随机变量X取值落在区间(µ-σ,µ+σ)内的概率约为63%,落在区间(µ-2σ,µ+2σ)内的概率约为95.4%;落在区间(µ-3σ,µ+3σ)内的概率约为99.7%。
综合井下环境复杂,定位信息存在误差等情况,选取1 个标准差范围内作为乘车人员的衡量标准。
利用式(7)、式(8)、式(9)计算样本期望、样本方差和样本标准差:
式中:µ为样本期望;X为样本随机变量,N为样本例数。
3 试验分析
在某矿进行系统试验,该矿主巷道部署UWB定位基站61 个,已基本实现重点路段UWB 信号全覆盖;在册车辆数104 辆;在册人数870 人。选取“27-缓坡斜井1 000 m”和“115-辅运大巷800 m”2 个定位基站作为测试基站(以下以D1和D2描述),2 基站为连续分布,选取运人车为测试车辆。测试方法为测试车辆从缓坡斜井处行进至辅运大巷中,试验过程中记录定位数据、算法生成的中间数据和最终结果,通过数据比对和人为观察验证功能的准确性和算法的运行性能。试验环境如图14。
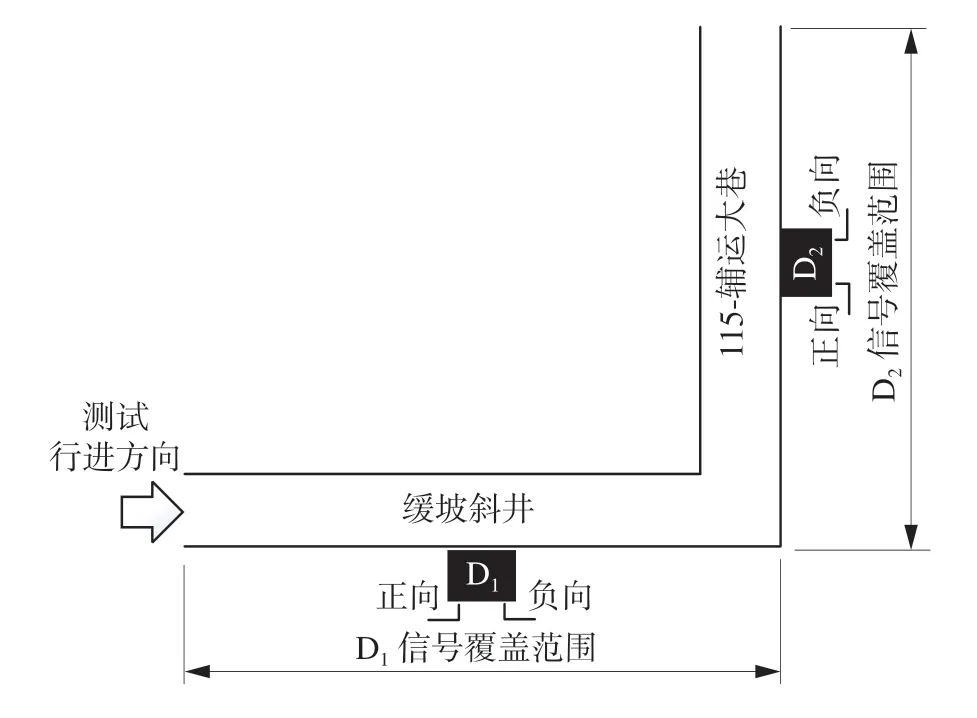
图14 试验环境Fig.14 Experimental environment
3.1 轨迹生成
1)单基站试验。以D1定位基站为测试基站,记录测试车辆经过基站时获取的测距信息,与算法转换后的空间距离(即转换后空间坐标与定位基站间的距离)做比对。试验结果表明:样本转换过程中产生的数据损耗约为48 mm,转换过程几乎无损,可满足应用要求。
2)跨基站试验。以D1和D2为测试基站,记录测试车辆经过2 个基站时的轨迹。跨基站试验结果如图15。从图15 观察可得:算法生成的运动轨迹点 {V1→V2→···→V7}为连续性轨迹。尽管轨迹点V4为2 基站信号重叠区域,经算法转换后,仍使得整个运动轨迹具有连续性。
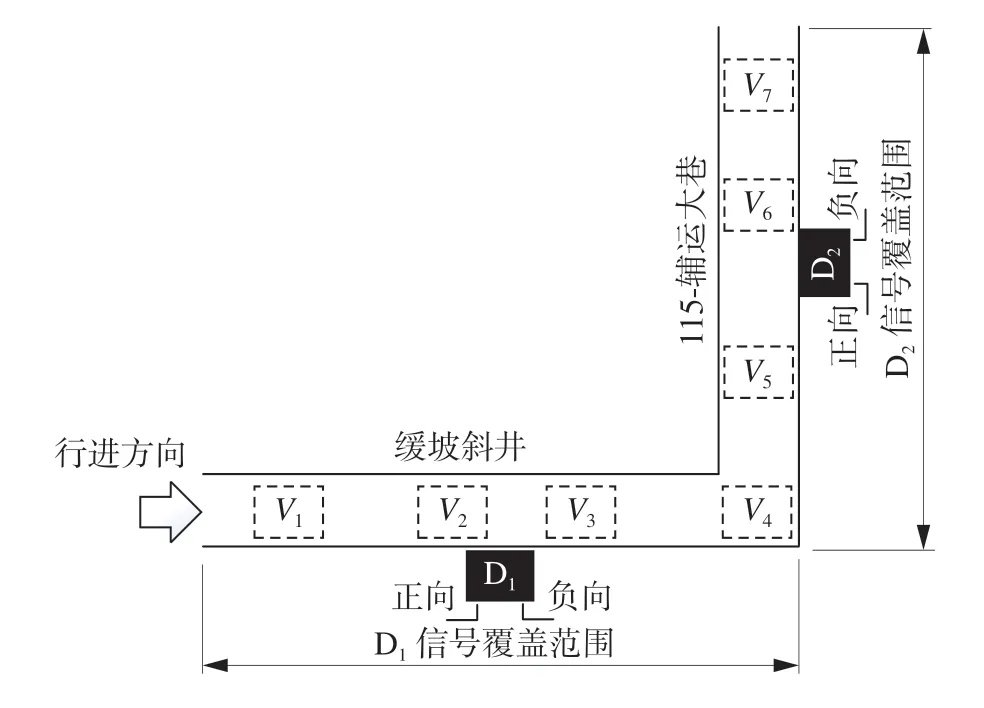
图15 跨基站试验结果Fig.15 Experimental result
3.2 轨迹预处理
以D1定位基站为测试基站,对比车辆经过基站的原始轨迹曲线与预处理后的轨迹曲线差异,以验证功能的准确性。原始轨迹与预处理后轨迹试验数据如图16。
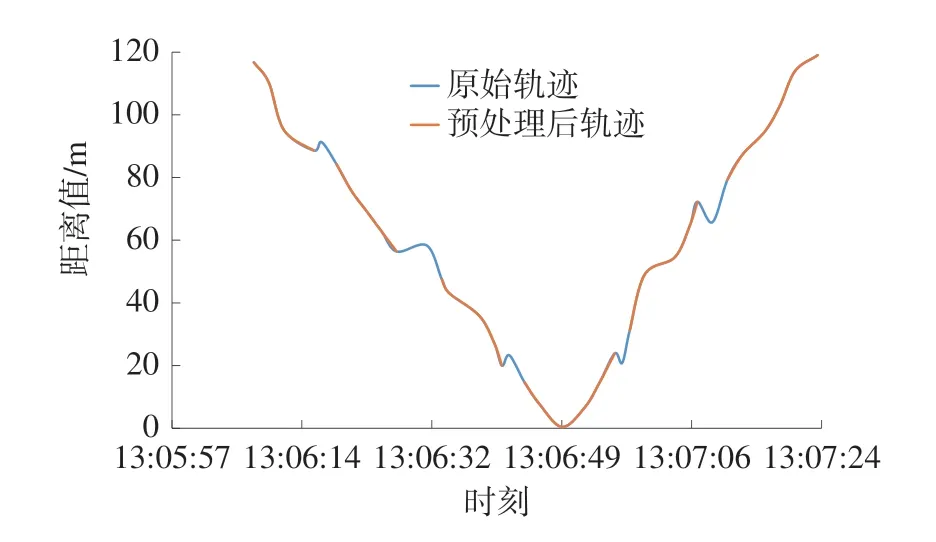
图16 原始轨迹与预处理后轨迹试验数据Fig.16 Experimental data of original trajectory and preprocessed trajectory
由图16 可知:预处理轨迹在保留原始轨迹趋势的前提下,可对凸起的噪声点进行有效屏蔽(即图中预处理轨迹缺失的部分),结果符合设计预期。
3.3 轨迹匹配
以D1定位基站为测试基站,测试车辆反复经过测试基站,获取司机的轨迹度量值曲线。
司机轨迹度量值曲线符合正态分布特征,样本期望为9.76,样本方差为2.02。
分别记录乘车人员和车外人员落在范围的概率,乘车人员和车外人员落在范围内的概率情况见表1。表1 中范围1、范围2 和其他的区间定义如图17。

表1 乘车人员和车外人员落在范围内的概率情况Table 1 The probability of passengers and people outside the vehicle falling within the range
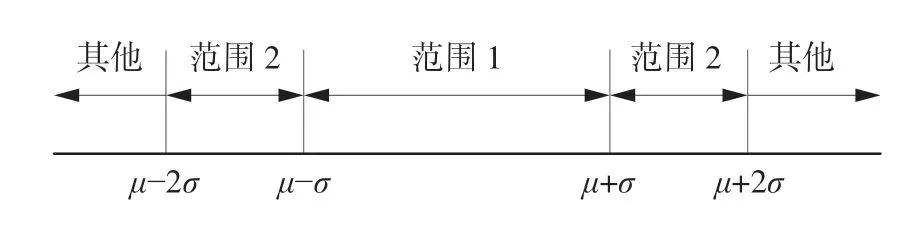
图17 区间定义Fig.17 Range definition
试验数据表明:轨迹匹配方法的正确率在95.12%,受环境因素以及车辆行进时速度不稳的影响,存在5%左右的漏判,无误判。
3.4 性能试验
以试验现场为例,在算法函数前后增加性能监听函数,经过一段时间的运行,累计记录2 000次性能记录,其中运行最大耗时为42 ms,最小耗时为20 ms,平均耗时约为30 ms。
试验结果表明:此方法的运行性能可满足于现场应用要求。
4 结语
1)为解决乘车人员漏识别,导致车辆超员无法有效管控,存在安全隐患的问题,设计了一种基于精确定位技术的车辆超员报警检测方法。该方法通过轨迹生成、轨迹预处理、轨迹相似度度量和轨迹匹配4 个步骤实现。
2)在某矿的现场试验结果表明:方法正确率在95.12%;方法平均逻辑响应时间约为30 ms,可满足现场应用要求。
3)方法具有2 项优势:①实用性:方法性能稳定、运行时效性高,可减少矿井安全隐患;②低成本:相比于硬件实现方案来说,软件成本较低。