基于指部感觉刺激的手功能康复系统研究
2024-02-02曹大迪邓华送权家友
曹大迪, 张 彦, 邓华送, 权家友, 王 勇
(合肥工业大学 机械工程学院,安徽 合肥 230009)
0 引 言
手是人体最灵活的器官之一,在日常生活中起着决定性的作用[1],然而脑卒中、建筑工地伤残、交通事故等意外常常导致人出现手功能障碍[2]。脑卒中即脑血管意外,别名卒中,中国拥有世界上最大的脑卒中群体[3]。作为全球第2大死亡原因,脑卒中有高致残率、高发病率、高死亡率,由此导致的上肢功能障碍患者需依赖他人进行日常活动[4]。约3/4的脑卒中患者初期存在上肢功能障碍[5];半数患者在脑卒中发作后3个月无法单独进行日常生活功能性活动[6]。随着现代康复治疗技术不断更新发展,脑卒中死亡率有所降低,但致残率和复发率仍很高。目前脑卒中无法通过药物治疗,只能通过康复手段治疗,而传统的康复治疗手段比较低效,因此将智能制造技术与中医理论相结合成为热门的脑卒中康复治疗手段。
对于手功能康复治疗问题,国内外学者展开深入研究。文献[7]运用虚拟现实 (virtual reality,VR)技术研发的上肢康复训练平台使用压力传感器采集手部压力信息,通过摄像头实时监控使用者上肢和手部活动获得场景信息;文献[8]提出感觉功能可以通过神经可塑性恢复,开发了新型鲁棒性手指触觉抓取式刺激器恢复手指运动和感觉功能;文献[9]研究了一款基于磁流变液阻尼器的手功能康复训练系统,患者可以结合康复训练辅助游戏进行手指锻炼;文献[10]将手功能康复训练和计算机反馈系统应用于偏瘫患者手功能康复,根据患者的训练评估表和表面肌电图来评估手功能恢复情况;文献[11]设计了一款手功能康复的指力按压器,患者根据软件画面中音乐提示符的节奏按压按键进行康复训练。
结合国内外关于手功能康复系统的研究不难发现,手功能康复机器人系统仍存在以下问题:
1) 手功能康复训练设备多为穿戴式,相对比较笨重,训练时容易挤压到患者手部,使用不方便。
2) 多数手功能康复设备只能对手功能的恢复起到一定作用,康复效果不理想,同时还缺少有效的康复效果评估手段。
3) 多数手功能康复设备适用于手部功能有一定恢复基础的患者,康复训练时不够灵活,不能快速连续地进行刺激。
康复医疗机器人已经广泛应用在肢体的临床康复中,并取得了不错的效果,由于手部康复治疗的复杂性,容易对手指造成伤害,目前针对手部康复治疗的装置不多,且多为穿戴式,相对笨重,康复治疗效果不佳。针对以上问题,本文研制一种无需穿戴、集康复训练和康复效果评估于一体、适用于不同程度的手功能障碍患者的手功能康复平台系统。
1 手功能康复训练系统构成
手功能康复训练系统整体框图如图1所示。上位机包括无线网络通信功能模块和康复治疗功能模块。上位机通过WiFi作为无线传输网络通信协议接收肌电信号,并通过以太网向下位机发送控制指令进而控制康复机构对患者手指进行康复训练。上位机可实时显示并保存手指的按压力度,让患者直观地看到压力值,同时这些信息也作为评估患者康复情况的依据。
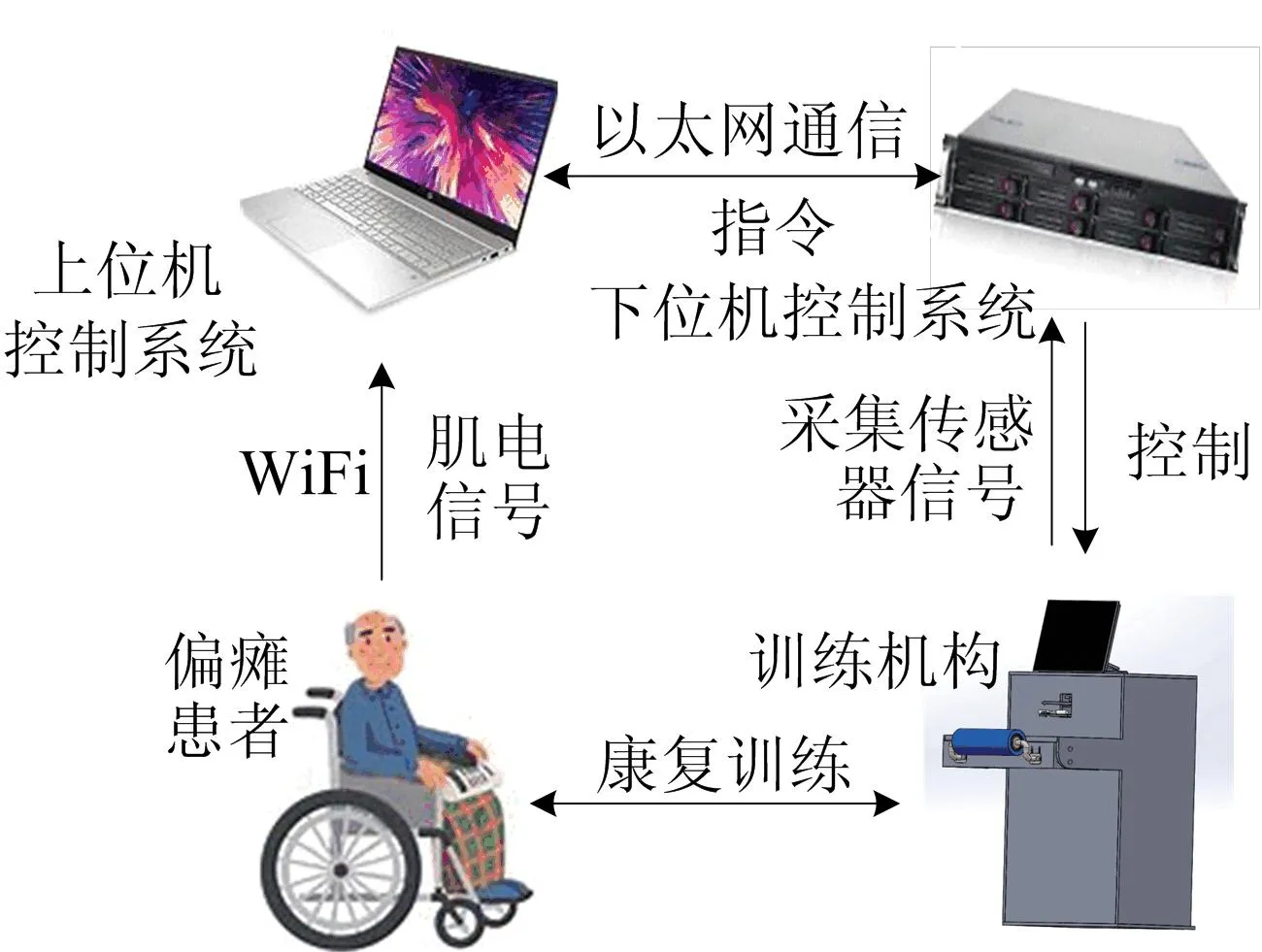
图1 手功能康复训练系统
针对患者手指痉挛状态,康复训练装置设有3种不同按压力度的训练模式。康复训练时,根据患者手指的痉挛状态在主界面中选择相应的康复训练模式,在直流电机的作用下,带动按压横梁,进而对手指进行康复训练。训练过程中通过压力传感器和肌电信号采集设备采集患者手指所受压力信息和表面肌电信号,帮助评估患者的康复状况,同时,还设置有光栅尺和限位开关用来保证康复训练的精准控制和安全性。
下面主要介绍手功能康复训练系统的机械结构和控制方法。
2 手功能康复训练系统结构设计
2.1 手指生物特性分析
现代临床医学证明手骨主要由腕骨、掌骨和指骨构成,手指的各种运动主要依靠肌肉带动指骨来实现。
人手有27个自由度:6个臂部自由度,表示手的位置和方向;21个掌部自由度,其中大拇指有5个自由度,其余4指均有4 个自由度[12-13]。
安徽医科大学第二附属医院医师临床研究发现,对脑卒中患者偏瘫侧实施指部徒手感觉刺激能够立即且显著地松弛屈指肌,使5指伸展,1次刺激效果可维持30~50 min,能够有效改善患者手功能运动障碍。基于这个临床发现,本文研制了一款用于偏瘫患者手指刺激的康复训练装置,用来代替医生对患者进行指部刺激。
2.2 康复训练系统结构设计
本文设计的手功能康复装置通过实现按压头可控的直线移动对患者手部进行按压刺激。该装置适用于不同程度的手功能障碍患者,无需穿戴,减少了患者手部负担,可用于每个手指的康复训练。该手功能康复平台系统机械本体的整体结构如图2所示。
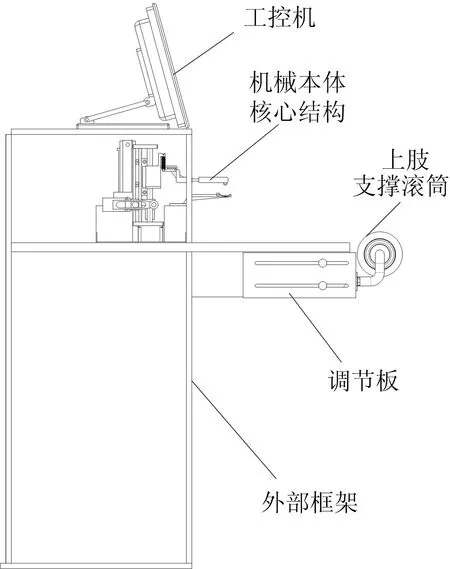
图2 机械本体整体结构
手功能康复装置的机械本体核心结构如图3所示。

1.滚珠丝杠模组 2.光栅尺 3.拉簧 4.铰链 5.压力传感器 6.激光模块 7.上按压横梁 8.下按压横梁 9.电机 10.底座 11.限位开关 12.固定板图3 机械本体核心结构
限位开关11、滚珠丝杠模组1、光栅尺2和下按压横梁8设置在底座10上,底座固定于平台上。上按压横梁7通过铰链4与固定板12进行铰接,并通过拉簧3提供预紧力,实现按压时的机械过载保护。患者在进行康复训练时,将手指放在下按压横梁8前端的凹槽中,通过激光模块6准确定位到需要按压的部位,工作时,在驱动传感装置控制下电机转动,滚珠丝杠模组将电机的旋转运动转换为滑块的直线运动,滑块再带动上按压横梁上下运动,实现上按压横梁前端的按压头对手指的按压刺激。
上按压横梁前端的按压头是对手指施力的主要结构,将其设计成圆锥状可以有效提高刺激压力,使更大的力作用于指甲处;压力传感器获取按压的压力值,实现力信息反馈。限位开关可以防止电机被误操作或者失控导致电机运转超出设定范围损坏机械结构;光栅尺可以准确定位按压头的位置,保证训练的安全性。
3 控制系统设计
3.1 控制系统总体结构设计
基于指部感觉刺激的手功能康复平台系统下位机采用模块化设计,包括运动控制器、压力传感器、驱动控制模块、光栅尺和电源管理模块。控制系统总体结构设计框图如图4所示。

图4 控制系统总体结构设计框图
核心控制模块运动控制器选用ZMC004WE,运动控制器收到上位机发送的控制指令后,对压力传感器采集数据的处理、光栅尺位移信息的采集以及伺服电机驱动器进行控制,还通过EtherCAT工业以太网与工控机进行通信。按压手指时,下位机实时采集压力传感器的数据,利用采集到的数据对电机进行控制,将压力数据发送到上位机并实时显示。驱动控制模块中伺服电机在伺服驱动器的控制下为装置提供执行动力。电源管理模块为运动控制器、激光模块等提供电源。
3.2 装置的选型与设计
3.2.1 应变片式压力传感器
为通过手指所受压力来实现力反馈以及对按压力度的控制,本文设计了应变片式压力传感器,它由导出线、应变箔、绝缘保护片等组成。此传感器依据的原理是金属应变箔在外力作用下产生微小变形时,电阻值会随之改变,通过电路转换将应变箔电阻的变化对应于输出电压的变化。
3.2.2 激光模块
本文装置在上按压横梁头部设置了激光模块,激光模块发出的红光可穿过按压头中部的小圆孔照射到手指指甲上,按压头会对激光照射的位置进行挤压,从而确保患者在康复训练中对手指进行精准按压,避免对手指造成二次伤害。
3.2.3 驱动控制模块
系统选用一川伺服电机60ST-M01330A配合伺服电机驱动器实现对伺服电机的驱动。采取的电机控制方法是位置脉冲指令驱动。
3.3 手势识别
基于临床发现,在对偏瘫患者患侧某一手指指甲进行按压刺激时,患侧部分手指会不自主地做伸展运动。针对这一发现,设计一种通过对手指进行挤压刺激来改善患者手指灵活度的训练装置。根据表面肌电信号识别康复训练前、后患者手部伸展程度,定量判断患者手部康复治疗效果。将手指活动角度和相应的手指灵活度分为4个等级,见表1所列。
手部从蜷缩状态开始,掌指关节分别转动20°、40°、60°、80°,将这4个手势分别定义为手势1~手势4,如图5所示。

图5 4种手势动作

图6 下位机的程序设计流程
根据表1,为患者设置3种康复治疗模式:对手指可轻微伸展的采用模式1;对手指可小范围伸展的采用模式2;对于所有手指都可伸展和可进行各种抓握状态的采用模式3。为研究对手部伸展动作识别的效率,选择10名无肌肉损伤以及3 d内无疲劳运动的健康受试者,在无干扰的环境中,重复做上面4种手势,采集受试者指伸肌的肌电信号,对采集的sEMG信号进行小波变换去噪和活动段检测等预处理,再对sEMG信号进行特征值提取处理。
通过分析,选用一对一(OVO-SVM)、一对多(OVR-SVM)、二叉树(BT-SVM)这3种支持向量机多分类策略对4种手势动作进行识别,3种方法平均识别率分别为(89.6±2.7)%、(90.0±2.1)%、(91.0±2.4)%。通过比较可知,BT-SVM多分类算法训练时间和决策时间都相对最短,最终选择识别效果最好的BT-SVM多分类算法。
4 康复训练方式设计
4.1 康复训练模式
本文康复训练装置由电机驱动,带动患者进行被动训练。康复训练时,由直流电机带动按压头对手指进行按压刺激,下位机需要实时采集压力传感器的数据,当按压头对手指的压力达到设定的阈值时电机反转,按压头向上运动回到设定的原点位置。
康复训练装置被动训练控制流程如图 6所示。训练时通过改变压力阈值大小来调节按压力度,根据患者手部痉挛的不同状况,该装置设置了3种模式,分别对应不同的按压力度。通过该装置进行周期性训练,可以使患者获得更加科学的康复训练实践,从而达到更好的康复效果。
4.2 保护措施
手功能康复训练的安全性是康复机器人首要考虑的问题,涉及到康复机器人的设计、制造、操作、维护等环节。本文手功能康复训练装置设置了正负限位开关、原点开关、急停按钮、光栅尺确保伺服电机运行的精确性和安全性。同时上位机上的人机交互界面会实时显示患者指部所受压力大小,避免压力过大对患者手部造成二次伤害。
手功能康复机器人的危险性在于装置本身故障、装置与患者碰撞以及操作失误。对于以上危险本研究采取了相应的安全措施。在康复训练时,运动控制器会并行运行3个任务以保证训练的安全性。具体任务以及安全措施如下:
1) 任务1:康复训练时,实时采集手部压力数据,判断压力值是否达到设定的压力阈值,若达到阈值则反向运转电机回到设定的位置,然后继续等待上位机发送新的控制指令。
2) 任务2:判断是否有急停按钮按下的信号,若有,则立即使电机停止运转。
3) 任务3:判断运动机构是否接触到正负限位开关,若接触,则让电机反转到设定的位置停下来。
5 试验结果与分析
为测试系统各模块相关功能的正确性以及整个系统的稳定性,下面对系统软硬件相互协调能力、硬件以及机械结构的可靠性和手势动作模式识别的有效性进行验证。
5.1 压力传感器、伺服电机、光栅尺测试
在压力允许范围内任取压力阈值25 N,点击按压按钮,电机正转,当压力值达到25 N时电机反转回到设定位置,压力曲线如图7a所示;经过测试,将电机转速设为1 000 r/min,患者有较好的治疗体验,其转速曲线如图7b所示;根据光栅尺可获得上按压横梁的精确位移,如图7c所示。

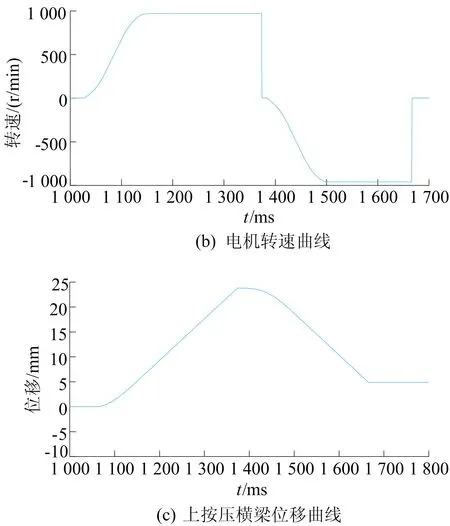
图7 压力、转速、位移测试曲线
本文将压力值从0增大到某一值再减小到0花费的时间定义为按压刺激时间。从图7a可以看出,按压刺激时间达到200 ms左右,一般人的反应时间为200 ms以上,在治疗时可极大地减少患者的痛苦。
从图7b可以看出,电机的加减速度较平滑,工作状态较稳定;位移曲线7c展示了上按压横梁的位移,最大位移为24 mm,按压刺激结束后回到位移为5 mm处。
5.2 手功能康复系统压力阈值测试
为保证手部康复治疗的有效性和安全性,对手指刺激的压力值范围进行试验测试。
本文选择20名健康人员进行手指压力测试,男女比例为4∶1,年龄为23~26岁,体质量指数为(23.08±2.87) kg/m2,将产生疼痛时的压力值作为按压刺激的最小阈值,5根手指的压力阈值测量点为指甲盖中心位置。将测试人员5根手指压力阈值的试验数据进行处理,得其平均值,具体见表2所列。
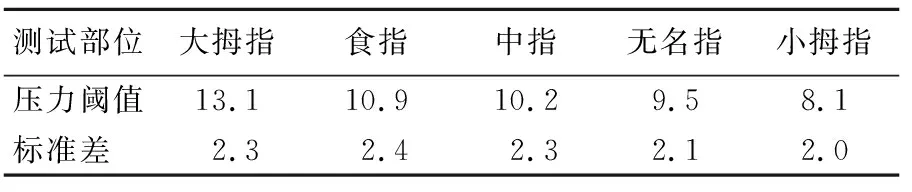
表2 5根手指指尖的平均压力阈值和标准差 单位:N
此处的压力阈值是可调节的,正常人和偏瘫患者的压力阈值有所区别,不同患者在不同时期指部所能承受的阈值也不一样,后期与医院进行合作,在对患者进行康复训练时,将根据患者当时的反应来确定压力阈值大小。
测试手指最大承受压力时疼痛感较大,这里只选择2名人员进行测试,记录各手指指甲压出红色印记的压力值作为最大承受压力值。最大承受压力值见表3所列。
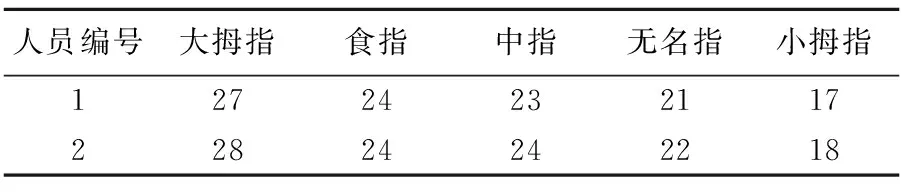
表3 2名测试人员指部最大承受压力值 单位:N
通过测量可以得到指部压力阈值和最大承受压力值,注意不能对患者手指造成二次损伤。取正常人手指压力阈值的2.00、1.75、1.50倍分别作为康复治疗模式1、模式2、模式3的压力值,见表4所列。

表4 3种康复模式设定的压力值 单位:N
5.3 手功能康复系统识别算法测试
为验证手势动作识别功能是否能与其他功能共同协作完成康复治疗,招募5名3 d内无剧烈运动的健康受试者,验证手功能康复系统的稳定性和动作识别的准确率。
测试识别算法试验如图8所示。
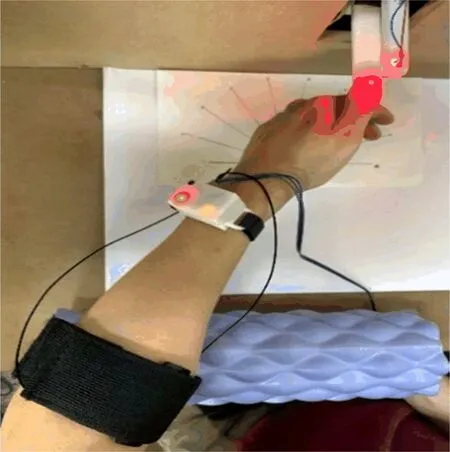
图8 测试识别算法试验
试验时,测试人员佩戴好自制的肌电信号采集设备,在设备前保持坐姿;当受试者受到按压刺激时,按照本文给出的4种手势动作运动,每个动作获取30组样本数据。将5名受试者各自的肌电信号样本训练的分类模型对其手势动作进行模式识别。
使用20组样本作为训练样本,10组样本作为测试样本,试验最终结果见表5所列。表5中的数据为10个样本全部被正确识别的个数。

表5 5位测试者掌指关节转动不同角度时手势识别结果
从表5可以看出,系统平均识别率可达到92%,基本满足本文装置的要求。由此证明BT-SVM多分类算法可以较好地应用在本文场景中。识别结果准确率稍微偏低,后续工作中会进一步优化,提高手势识别率。
由试验结果可知,本文设计的手功能康复平台系统手势识别准确率较高,且界面响应以及机械动作反应较快,能够根据康复训练前、后患者手指张开的角度实现定量评估康复治疗效果。
6 结 论
针对手动刺激指部缓解痉挛的治疗方法,本文提出了一种基于指部感觉刺激的手功能康复平台系统。试验结果表明:康复训练时,按压刺激时间为200 ms,小于一般人的反应时间,极大地减少了患者的痛苦;工作时电机的加减速度变化比较平滑,工作状态较稳定;一次按压结束后按压头能准确地回到设定位置,确保了按压过程的安全性和有效性。根据测量手指承受压力的阈值设定3种模式的压力值,再针对不同的手指进行康复训练,保证了康复训练的有效性;手势动作识别率达到92%,能够满足通过识别患者康复训练前、后的手势对康复效果进行定量评估。
本文手功能康复系统操作简单、响应速度快、按压力度精准可控、稳定性高,能够代替医生对患者进行指部刺激训练和康复效果评估;系统存储的康复训练数据为今后按压手法的标准化提供了保障,为进一步研究肌电信号与指部痛觉之间的关系打下了基础。该手功能康复系统的康复效果和评估效果还需要与医院进一步合作,继续完善不足之处。
