基于动力源分类的无人机起飞方式综述
2024-02-02郑济沅
郑济沅,周 亢
(北京理工大学 机电学院, 北京 100081)
0 引言
无人机(UAV)是无人驾驶飞机(unmanned aerial vehicle)的简称。在第一次世界大战中以“零伤亡”为初衷,无人机概念被第一次提出。但在此之后的几十年间无人机通常被当作训练靶机使用[1]。无人机第一次执行军事任务是在越南战争中,美军利用其良好的灵活性和机动性进行侦察和目标指引工作[2]。
随着计算机以及相关电子技术的迅猛发展,在20世纪晚期西方各国逐渐意识到无人机在军事行动中的重要性,投入大量人力财力到先进无人机研发中。如今,无人机已经在战争中扮演了不可或缺的角色。此次俄乌战争中,双方都意识到无人机的不可替代性,提早向无人机技术大国购买了先进机型。例如乌克兰向土耳其购买TB2察打一体无人机[3],俄罗斯向伊朗购买Shahed-136自杀式无人机。
作战时,无人机的起飞方式是关键因素,决定了无人机作战的灵活性、机动性和高效性等。目前无人机的起飞方式已由最初的滑跑起飞发展成如今各式各样的起飞方式,如弹射起飞、火箭助飞、垂直起飞、空中投放、手掷起飞等。以往根据无人机起飞平台的位置不同将起飞方式分为陆基起飞、空基起飞和海基起飞3大类[4-5],也可根据是否有外部设备为无人机起飞提供动力分为自力发射和他力发射2大类[6]。本研究中按照无人机起飞的动力源不同,将起飞方式分为势能膨胀力作为动力源起飞、电磁力作为动力源起飞、气体反冲力作为动力源起飞和人力作为动力源起飞4大类。
1 势能膨胀力作为动力源的起飞方式
势能膨胀力作为动力源的起飞是指推动介质产生的膨胀力在推动无人机起飞时,其势能转化为无人机的动能从而实现无人机的起飞。根据推动介质的形态可分为气压弹射、液压弹射及弹性元件弹射。将推动介质的势能膨胀力作为动力源的这类起飞装置结构简单且绿色无污染。但由于物理规律,推动介质的势能膨胀力会在无人机起飞过程中逐渐减小,这导致无人机在此过程中所受应力的变化较大,对无人机机身结构具有较大影响进而降低了无人机的使用寿命。
1.1 气压弹射
气压弹射是指气体作为推动介质,在无人机起飞过程中气体的势能转化为无人机的动能,实现无人机的起飞。这种起飞方式主要包括蒸汽弹射起飞、压缩空气弹射起飞等。蒸汽弹射器通常装配在航空母舰上用于舰载机的起飞;压缩空气弹射器常用于陆基和海基无人机的无跑道起飞,能够实现中小型无人机快速起飞。
1.1.1蒸汽弹射起飞(舰载)
蒸汽弹射器是将舰船主机锅炉产生的水蒸汽所蕴含的势能转化为舰载机动能的起飞装置。蒸汽弹射器常用于舰载机的有跑道起飞,能实现大型飞机的舰载起飞,也是目前主流的舰载机起飞装置。完整起飞过程是:蒸汽蓄热器的气压达到目标值后,蒸汽通过发射阀被按需释放到汽缸中。进入汽缸的蒸汽所产生的膨胀力对活塞做功推动活塞向前运动,活塞带动弹射梭和舰载机进行直线加速运动,最后实现舰载机起飞[7]。复位装置能够快速使活塞及弹射梭回到下一次起飞的初始位置,这使得每部弹射器理论上能30~45 s发射一架飞机[8],具有较高的发射频率。这提高了航母作战的反应速度,有利于机群的快速作战。但由于发射能量来源于舰船主机锅炉,每弹射一架飞机后锅炉压力会降低,这会导致航母航行速度下降,不利于航母全速作战。蒸汽弹射方式在当时占有绝对优势,并在之后的半个世纪里绝大多数航母的起飞装置都是蒸汽弹射器。但由于蒸汽弹射器弹射调节能力有限,只适用于弹射20~35 t的大型飞机。
1.1.2压缩空气弹射起飞
压缩空气弹射的基本原理与蒸汽弹射相似,只是用压缩空气代替水蒸汽作为推动介质。该弹射系统通常由空气压气机、高压储气罐、气压动作筒、复位动作筒、加速滑轮组、阻尼器、滑轨车及锁定装置等部件组成[9]。图1为压缩空气弹射装置的结构原理图。
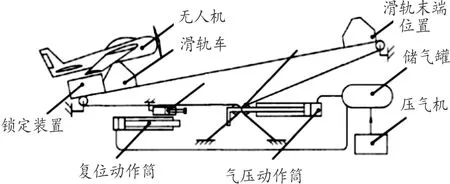
图1 压缩空气弹射装置结构图
压缩空气弹射具有结构和原理简单、工作成本低、能量密度高、机动性强、方便维护等显著优势,且只需调节储气罐目标压力就可实现对不同规格无人机(范围在中、小型无人机内)的起飞,具有比蒸汽弹射较好的普适性。这些优势使得压缩空气弹射在中小型无人机的起飞中得到广泛应用。例如,美国“扫描鹰”(ScanEagle)无人机(如图2),其最大起飞质量为15 kg,它使用的是“超级楔形”(SuperWedge)气动弹射架;“黑杰克”(Blackjack)无人机,它使用的“Mark4”气压弹射器;英国“不死鸟”(PHOENIX)无人机,其最大起飞质量209.2 kg;以及我国西工大研制的NPU-GT01无人机。

图2 “扫描鹰”无人机
1.2 液压弹射
液压弹射是指液体作为推动介质,在无人机起飞过程中液体的势能转化为无人机的动能,实现无人机的起飞。液压弹射的推动介质一般采用油性液体。液体具有不可压缩性,所以液体有较高的传动力,同时也导致液体不能作为储能物质,因此通常需要在液压弹射系统中增加气体储能装置。这使得液体弹射与压缩空气弹射具有较为相似的工作原理,储能装置中的高压气体挤压并推动液压油高速流动,液压油推动液压缸内的活塞运动,活塞又带动无人机助推器快速运动,最终实现无人机起飞。
20世纪40年代,第1个液压弹射装置问世并装配到航空母舰作为舰载机的起飞装置。二战后战斗机领域发展迅猛,出现了质量更重、起飞速度要求更高的喷气式战斗机。为了能使这类战斗机舰载起飞就必须增加液压弹射的弹射能力,而弹射能力与液压弹射装置的总体积和质量成正比,这就导致当时的航母无法搭载如此大体积大质量的液压弹射装置。再加上液压油在作为推动介质时处于高压高温高速状态下,很容易发生液压油沸燃的现象,存在较大的安全隐患。这些致命缺陷导致液压弹射装置不适用于喷气式战机的舰载起飞。但后来由于无人机的兴起,液压弹射起飞又再次进入大众视野。由于无人机相比于喷气式战斗机具有较小的质量,液压弹射装置的质量和体积也随之变小。这种小型液压弹射装置具有发射周期短、机动性强等优势。
国外对此类液压弹射装置的研究已经十分成熟,已有多款此类装置实现了商业化。例如,芬兰罗伯尼克(Robonic)研发的MC2555LLR液压弹射装置[10](如图3)、英国“不死鸟”无人机液压弹射装置[11]以及瑞士RAUG公司研制的DC4型液压弹射装置[10]和荷兰罗格航空公司设计的ARCHER式液压弹射装置。

图3 MC2555LLR液压弹射器
1.3 弹性元件弹射
固体推动是指固体作为推动介质,在无人机起飞过程中固体的弹性势能转化为无人机的动能,实现无人机的起飞。这种弹射方式也称为弹性元件弹射或弹力弹射,根据弹性元件不同可分为弹簧弹射起飞、橡皮筋弹射起飞等。这类弹射装置结构简单、易于操作且方便运载具有较强机动性,但由于弹性元件物理属性(如弹性模量、疲劳极限等)的限制,这类装置仅适用于弹射微、小型无人机且使用寿命有限。以色列的Micro-V无人机采用一种车载弹簧弹射器起飞,法国“马尔特”(Mart)MK-2无人机和西班牙 Aerovision航空系统公司与法国泰勒斯公司合作研制的“管鼻鹱”(Fulmar)无人机[12](如图4)都采用橡皮筋弹射器起飞。

图4 “管鼻鹱”无人机
2 电磁力作为动力源的起飞方式
电磁力作为动力源的起飞方式是指直线电机产生电磁力推动无人机起飞过程中,电能短时间内转化为无人机的动能,实现快速且平稳无人机起飞。目前这类起飞方式只有电磁弹射起飞。
电磁弹射是当前各国对舰载弹射器研究的热门方向,但由于其极高的技术难度和成本,目前只有中美两国实现了舰载电磁弹射。利用电磁弹射装置将无人机起飞的基本原理是电流在磁场中受安培力作用,通过安培力将电磁能转换为无人机的动能,实现无人机起飞。电磁弹射系统通常由6个子系统组成:供电系统、发射系统(即直线电机)、强迫储能系统、变流系统、控制系统、辅助系统(即冷却装置、电磁干扰屏蔽装置、减速缓冲与刹车装置等)。图5是电磁弹射系统结构图[13-14]。

图5 电磁弹射系统结构图
我国福建舰电磁弹射系统的2个关键系统:供电系统、储能系统,均不同于美国福特号,福建舰采用的是马伟明团队研制的中压直流供电系统[15],避开了福特号使用的中压交流供电系统带来的频繁故障且能量转换效率也比福特号更高。福建舰的储能系统使用的是超级电容储能装置,相比于福特号采用的飞轮储能装置(FES),超级电容储能装置具有更小的体积、质量和更高的功率密度。
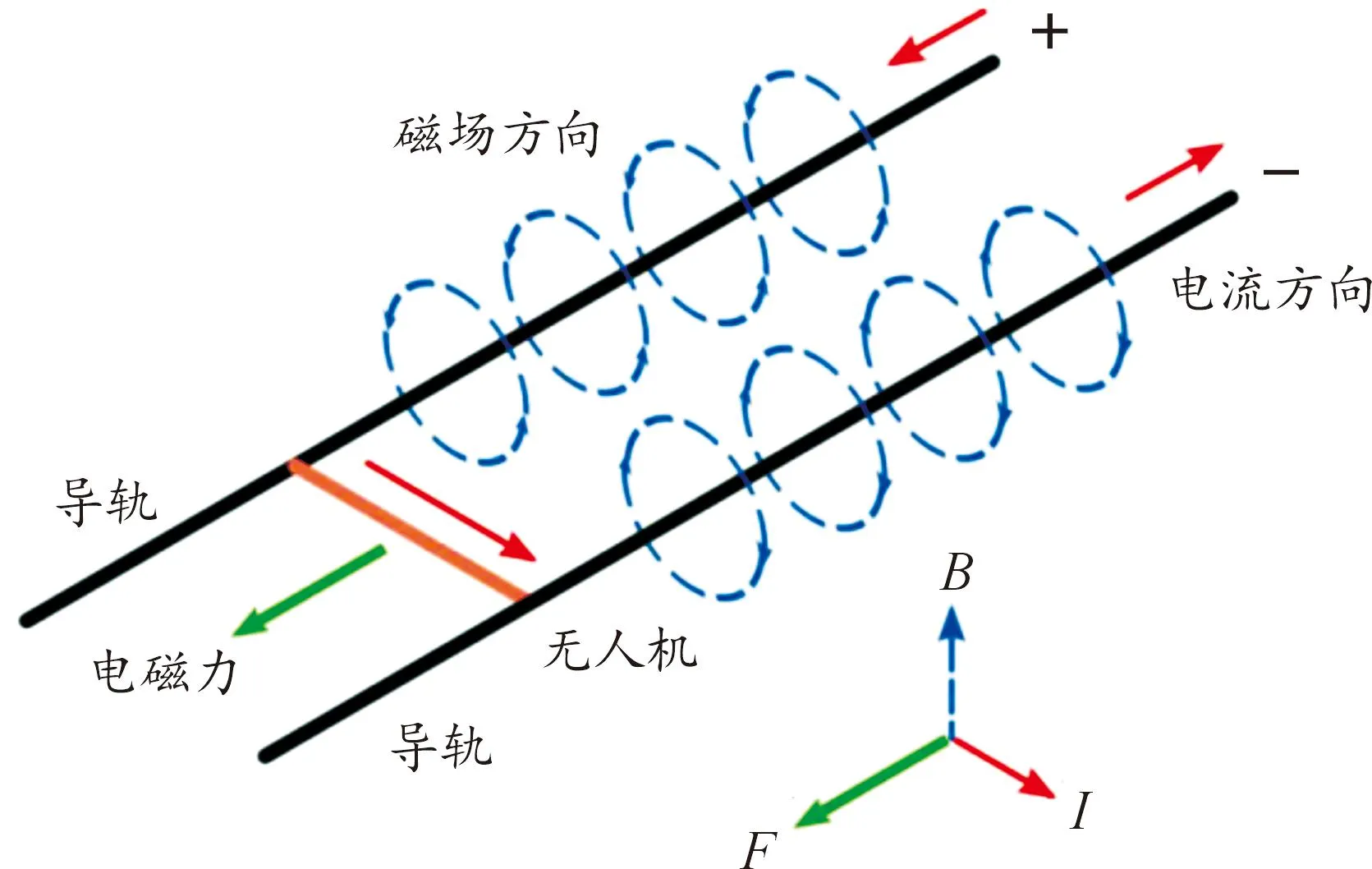
图6 电磁弹射原理示意图
图6是电磁弹射原理示意图,其中无人机所受电磁力大小为
F=BIL
(1)
式(1)中:F为无人机所受电磁力;B为无人机所处位置的磁场强度;I为电流大小;L为两导轨间距。由式(1)可知,理论上控制电流的变化就能实现对电磁弹射弹力的调节及对弹射过程中弹力的恒定。所以与势能膨胀力作为动力源的起飞装置相比,电磁弹射过程加速更为稳定且电磁弹射弹力调节范围广、具有较强的普适性。但由于电磁弹射的超大磁场,需要设计防磁干扰装置以免影响飞机及其他设备的正常运行。防磁干扰装置需覆盖整个起飞轨道来防止磁漏现象[16],所以该装置的体积较大会占据不少空间。
由于目前电磁弹射技术初步成熟,实现电磁弹射起飞的无人机较少。例如美国的X-47B隐形无人机在福特号上实现电磁弹射起飞[17]。随着我国电磁弹射技术的应用,未来在福建舰和076两栖攻击舰上将会有像攻击-11无人机等许多无人机依托电磁弹射器实现起飞。
3 气体反冲力作为动力源的起飞方式
气体反冲力作为动力源的起飞方式是利用气体反冲力推动无人机运动,实现无人机起飞。该起飞方式通常是向飞行的反方向喷出大量高速气体,根据动量守恒定律无人机将获得巨大的正向动能。这类起飞方式主要包括垂直起飞、火箭助推起飞、滑跑起飞、空中投放等。
3.1 垂直起飞
垂直起飞不需要滑跑轨道就可实现无人机静止状态下垂直于地面向上升空,实现无人机短距起飞。这种起飞方式不用依靠外界设备,仅利用自身产生的高速气体反冲力即可实现起飞,所以这种起飞方式也是自力起飞的一种。随着近年来的飞控技术、发动机技术等迅猛发展,这种起飞方式安全性越来越高,再加上这种起飞方式具有对起飞场地要求低,有较强的机动性、灵活性的这些诸多优势,无人机垂直起飞技术逐渐开始商业化进入民用市场。目前民用无人机中采用垂直起飞方式的占比高达90%[18],全球最大的2个民用无人机公司:我国的大疆和法国的派诺特,他们的产品几乎也都是采用旋翼式垂直起飞技术。国内外学者对垂直起飞无人机进行了大量研究,其种类也因此越来越多。目前常见的垂直起飞无人机按照机翼不同可分为:旋翼式无人机、旋翼-固定翼复合式无人机、倾转式无人机、固定翼式无人机、仿鸟扑翼式无人机。
3.1.1旋翼式无人机
旋翼式无人机通过其高速旋转的机翼产生向下高速气体,利用高速气体反冲力当作升力,使无人机竖直向上起飞。按照旋翼的个数又可分为单旋翼和多旋翼。单旋翼无人机也就是无人直升机,它们只有一个旋翼来提供升力,这类无人机的飞控技术简单且成熟。著名的无人直升机有我国深圳联合飞机公司研制的TC-9、美国的 “火力侦察兵”MQ-8C无人机、挪威Prox Dynamics公司研发的“黑黄蜂”PD-100无人机。多旋翼无人机通常有2个以上的旋翼,只需通过调节每个旋翼的转速就能控制无人机速度及姿态,具有较强的灵活性和可靠性,所以民用无人机大多数都是这种多旋翼无人机,例如大疆系列的无人机。
3.1.2旋翼-固定翼复合式无人机
旋翼-固定翼复合式无人机由旋翼和固定翼这2种机翼在不同阶段提供升力。在垂直起飞阶段,旋翼高速旋转为无人机提供升力;在水平飞行阶段,旋翼停止工作并由水平推动装置提供(通常是螺旋桨)前进方向的动力,固定机翼由于伯努利原理产生向上升力克服自身重力。这类无人机融合了直升机和固定翼飞机的优点。不仅能实现空中悬停,也可以和固定翼无人机一样进行高效且易于控制的水平飞行,大幅度提高了无人机的飞行速度和续航能力。这种无人机中较有代表性的是美国的“龙勇士”(Dragon Warrior)无人机[19](也称“Cypher”Ⅱ无人机)(如图7)和成都纵横公司研制的CW系列无人机。

图7 “龙勇士”无人机
3.1.3倾转式无人机
倾转式无人机起飞和水平飞行的工作原理与旋翼-固定翼复合式无人机相似。不同的是旋翼-固定翼复合式无人机起飞和水平飞行分别由两套推动装置提供推力,而倾转式无人机在这2个阶段中都是由同一套推动装置提供推力。倾转式无人机在垂直起飞阶段,推动装置产生向上推力作为起飞升力;在水平飞行阶段,将推动装置产生的推力倾转到水平方向作为无人机水平飞行的动力,此时固定机翼为无人机飞行提供升力。相比于旋翼-固定翼复合式无人机,倾转式无人机只有一套推动装置大大减少了无人机的自重、在水平飞行阶段没有固定旋翼产生的阻力,这样就大幅度提高了这种无人机飞行速度和续航能力。按照倾转部位的不同可将此类无人机分为:倾转旋翼式无人机、倾转涵道式无人机、倾转机翼式无人机、倾转机身式无人机。
1) 倾转旋翼式无人机
倾转旋翼无人机在垂直起飞后,旋翼发生倾转,当作螺旋桨为水平飞行提供动力。此类无人机中最具代表性的是美国贝尔公司研制的“鹰眼”无人机。此外在今年第十四届珠海航展上亮相的我国彩虹-10无人机也是采用这种倾转旋翼式结构(如图8)。

图8 彩虹-10无人机
2) 倾转涵道式无人机
倾转涵道无人机与倾转旋翼无人机的机身结构及起飞和水平飞行原理相似,唯一不同的是在旋翼周围增加了涵道。由于涵道的环括作用[20],大大削减了旋翼产生的噪声。而且涵道能够在旋翼的流场中产生较强的附加拉力[21],大幅提高推动装置的动力并减少油耗。此类无人机有芬梅卡尼卡直升机公司研制的名为“ProjectZero”纯电动倾转涵道无人机;波音公司鬼怪工厂研制的“幽灵雨燕”无人机。
3) 倾转机翼式无人机和倾转机身式无人机
这2种无人机由于倾转的部位质量和体积较大,导致无人机的能耗增加以及不可靠性也增大。所以这类无人机投入实用的较少,美国极光飞行科学公司研制的“雷击”无人机是倾转机翼式无人机(如图9);倾转机身式无人机的典型代表是美国弗瑞明公司研制的“Scorpion”无人机。

图9 “雷击”无人机
3.1.4固定翼式无人机
这类无人机可分为尾座式和推力矢量式2种。尾座式无人机起飞姿态较为特别,以尾部接触地面、机身竖直向上的姿态进行垂直起飞。目前最为先进的固定翼尾座式无人机是美国马丁无人机公司(Martin UAV)研制的V-Bat(Vertical-Bat或VTOL-Bat)无人机(如图10)[22-23]。该机垂直起飞升力由尾部单涵道风扇活塞发动机提供,水平飞行由该推动装置提供前进动力,由固定机翼提供升力。通过控制涵道内的八片滑流舵组合偏转实现V-Bat的飞行姿态控制以及垂直起飞模式和平飞行模式间的切换。固定翼推力矢量式无人机是由英国的“鹞”式战斗机发展演变而来。通常这种无人机垂直起飞时水平放置于地面,由尾部的推力矢量喷管偏转至垂直向下产生向上推力,同时靠头部的升力风扇也产生向上推力,二者合力作为无人机升力实现垂直起飞。

图10 V-Bat无人机
3.1.5仿鸟扑翼式无人机
仿鸟扑翼式无人机(BFAV)是一种全新概念的无人机,具有体积小、飞行效率高、隐蔽性好等诸多特点。此类无人机十分适用于在城市楼群、山地密林等复杂背景下,对可疑区域和可疑目标实施侦察等作战活动中。按照扑翼的运作方式可分为:扑翼尾座式无人机和扑旋翼复合式无人机。扑翼尾座式无人机通过两机翼的扑动为无人机起飞提供升力,例如美国航空环境公司研制的Nano Hummingbird无人机[24]和中国北京航空航天大学研制的仿蜂鸟扑翼无人机[25]。旋翼-扑翼复合式无人机类似于旋翼-固定翼复合式无人机,都是利用高速旋翼提供垂直起飞升力,扑翼装置则在水平飞行时提供无人机升力和前进动力。文献[26-27]中设计了一种四旋翼-扑翼复合式无人机(如图11)。

图11 四旋翼-扑翼复合式无人机
3.2 火箭助推起飞
无人机凭借火箭助推器提供的动力,达到起飞速度并实现起飞,这种方式即称为火箭助推起飞。通常是将带有火箭助推器的无人机放置在零长或短距起飞装置上,火箭助推器内燃料燃烧喷射高速气体所产生的巨大反冲力推动,无人机达到起飞速度后火箭助推器自动脱落,依靠自身动力装置继续飞行。陆基的火箭助推装置一般由零长或短距起飞轨道、运载车以及控制装置组成,这使得运载车可以搭载无人机到指定目标地进行快速起飞。由此可见火箭助推起飞具有对起飞场地要求低、机动性和灵活性强的特点,非常适合无人机快速作战。采用火箭助推起飞的无人机较多,例如参加此次俄乌战争的Shahed-136(见证者-136)无人机(如图12),是伊朗研制的一款自杀式无人机,起飞质量是200 kg,其所携带的战斗部能轻松摧毁敌军坦克等打击目标;以色列的“哈比”自杀式无人机以及其进阶版“哈洛普”自杀式无人机[28],我国的WJ-600高速察打一体无人机都是采用火箭助推起飞;德国的“泰番”(Taifun)自杀式无人机,这款无人机外形较为特别,机翼在未起飞时是折叠状态,起飞再展开提供升力。

图12 见证者-136自杀式无人机
3.3 滑跑起飞
滑跑起飞是最为普遍和简单的起飞方式,利用无人机发动机产生高速气体的反冲力作为动力推动无人机加速起飞。按照起飞平台的不同可以分为水面滑跑起飞、跑道滑跑起飞、起飞车滑跑起飞。
3.3.1水面滑跑起飞
水面滑跑起飞是指无人机在水面上加速滑行到起飞速度后实现起飞。相比于跑道和起飞小车滑跑起飞,具有较好的机动性和灵活性,因为它对起飞场地要求低不需要跑道及良好的地况,只需较为宽阔的水面。但无人机在水面滑行时受力情况比较复杂,会受到推动装置的推力、水和空气的阻力等,使无人机起飞时的控制难度增大,容易出现“翻机”等危险现象[29]。我国上海优维斯公司研制的U650无人机即采用水面滑跑起飞,也可将机身腹部起落架展开进行跑道上的轮式起飞。
3.3.2跑道滑跑起飞
跑道滑跑起飞也称轮式起飞,也就是普通载人飞机的起飞方式,适用于大型无人机及重型无人机起飞,例如美国的“捕食者”MQ-1无人机和“全球鹰”RQ-1无人机、俄罗斯的“猎人”S-70无人机及我国的彩虹-7无人机、翼龙-3无人机和无侦-10无人机等。为了减少无人机自重,不少机型采用可弃式起落架进行轮式起飞,降落时再利用特定的无人机回收装置进行回收,但这种起飞方式也大大增加了起降成本,例如美国的“秃鹰”(Condor)无人机和巴西的 BQM-1BR无人机均采用可弃式起落架。
3.3.3起飞车滑跑起飞
起飞车滑跑起飞是指起飞车作为无人机的起落架,无人机在起飞车上起飞。由于起飞车可以多次使用,这不仅减少了无人机自重,也没有较大地增加起飞成本。但由于起飞车载重限制,不适用于超大型无人机。而且起飞车需要长距离停车,需要较长的跑道。较为著名的几款此类无人机有伊朗的Shahed-191 隐形无人机(如图13),它采用丰田皮卡作为起飞车来滑跑起飞、我国研制的“长空-1”号靶机。

图13 Shahed-191 隐形无人机
3.4 空中投放
空中投放是指投放平台搭载单个或多个无人机抵达目标空域后进行无人机空中投放,实现无人机起飞。按照投放平台的不同,可分为母机投放和母弹投放。母机投放通常是母机通过滑跑起飞(利用发动机产生的气体反冲力实现母机起飞)后,将携带的无人机运输至指定空域后进行投放。携带的方式通常是用大型运输机或轰炸机将无人机装在机舱或弹仓内,这种携带方式可以实现无人机的“蜂群”作战,例如美军 “女武神”XQ-58A无人机空中投放ALTIUS-600小型无人机[30]、意大利的“米奇拉”100无人机可装载于Agusta A109直升机进行空中投放;或者是用攻击机将无人机以挂弹形式悬挂在机翼下方,在释放悬挂装置后无人机可作为僚机参与作战,例如我国轰-6k轰炸机挂弹式空中投放砺剑-1无人机(如图14)。母弹投放的基本方式与母机投放相似,无人机通过改装后挂载于导弹或火箭弹等母弹(通常不带有战斗部)上。例如2022年6月,我国某型火箭搭载无人机在减速后以近0.7马赫的速度,在预定区域和高度成功投放无人机。母弹发射(导弹燃料燃烧产生气体反冲力推动导弹发射)将无人机运载至目标空域后减速进行投放。由于母弹发射时无人机要承受较大加速度,这导致母弹投放这种方式对无人机机身结构强度要求较高。

图14 轰-6k轰炸机空中投放砺剑-1无人机
这种依靠空中投放平台的无人机起飞方式操作简单易行,只需将普通无人机搭载于投放平台,不需要额外的助飞设备。借助空中投放平台的速度优势,无人机可快速抵达指定空域,具有较强的快速作战能力。但空中投放的无人机独立作战能力弱,对母机起飞跑道和母弹发射装置依赖性高,而且这种起飞方式若用于少量无人机起飞会具有较高的成本。
4 人力作为动力源起飞
人力作为动力源的起飞方式即手抛起飞,起飞过程是起飞人员用手将无人机抛出,通过手给无人机做功的方式使无人机达到其较低的起飞速度,再实现起飞后无人机依靠自身的推动装置进行飞行。手抛起飞是最简单、最灵活、具有最强机动性的起飞方式。但这种起飞方式的缺陷也同样突出,手抛起飞只适用于小型、微型无人机,通常最大起飞质量不超过7 kg,最大尺寸小于3 m。这类无人机可分为固定翼式和扑翼式。手抛起飞的固定翼式无人机有美国的“龙眼”微型无人机、美国的“大乌鸦”无人机、我国的彩虹-802无人侦察机(如图15)、以及参加此次俄乌战争的美军“美洲狮”无人机,其最大起飞质量为5.9 kg,再手抛起飞后它通过电动机驱动螺旋桨转动产生动力使其飞行。凭借其噪声小、相机性能强等特点,通常将其用于执行无人机旨在执行情报、监视、侦察和目标任务,是目前较为先进的一款微型无人机。手抛起飞的扑翼式无人机有美国陆军研究实验室研制的“机器乌鸦”(Robo-Raven)仿生无人机[31-32]。

图15 彩虹-802无人侦察机
Prioria机器人公司研发的“幼畜”(Maveric) 无人机,该无人机不仅能手抛起飞,也可以通过专有的管式发射系统起飞[33];我国西北工业大学研制的“云鸮”仿鸟扑翼机,较上一代“信鸽”加入了人工智能系统、抗电磁干扰系统以及抗强风系统,能够在-10~40 ℃、4级风及小雨雪环境下使用,并且创造单次连续飞行123 min的世界纪录。
5 具备多种起飞方式的无人机
为应对不同的起飞需求,将多种起飞方式运用到一架无人机上的研究已成为当前的热门之一(见表1)。一类是无人机借助一种或多种起飞装置实现多种方式起飞,另外一类是对无人机自身结构进行设计,例如U650无人机展开起落架后可以实现轮式滑跑起飞。另外,旋翼-固定翼式无人机和倾转式无人机在装配上起落架后理论上均能实现轮式滑跑起飞和垂直起飞。
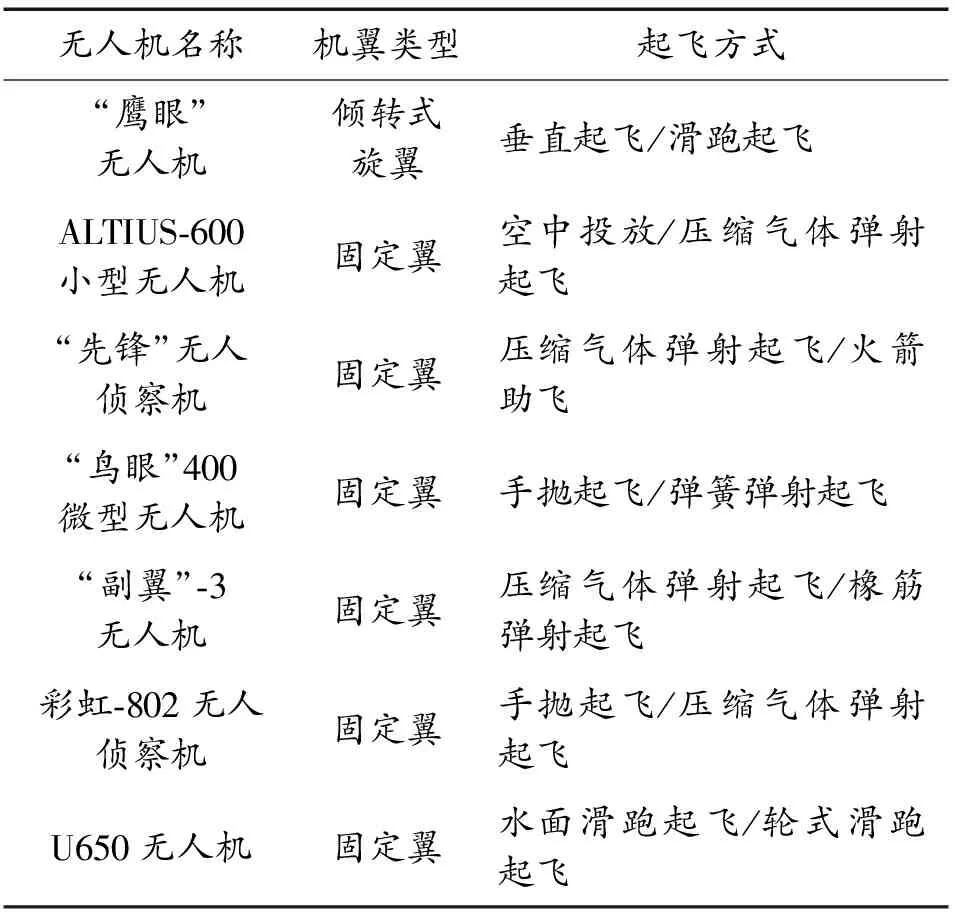
表1 具备多种起飞方式的无人机
6 无人机起飞方式对比
无人机机型分类(按起飞质量)如表2所示。无人机起飞方式如表3所示。军用无人机和民用无人机对比如表4所示。

表2 无人机机型分类(按起飞质量)
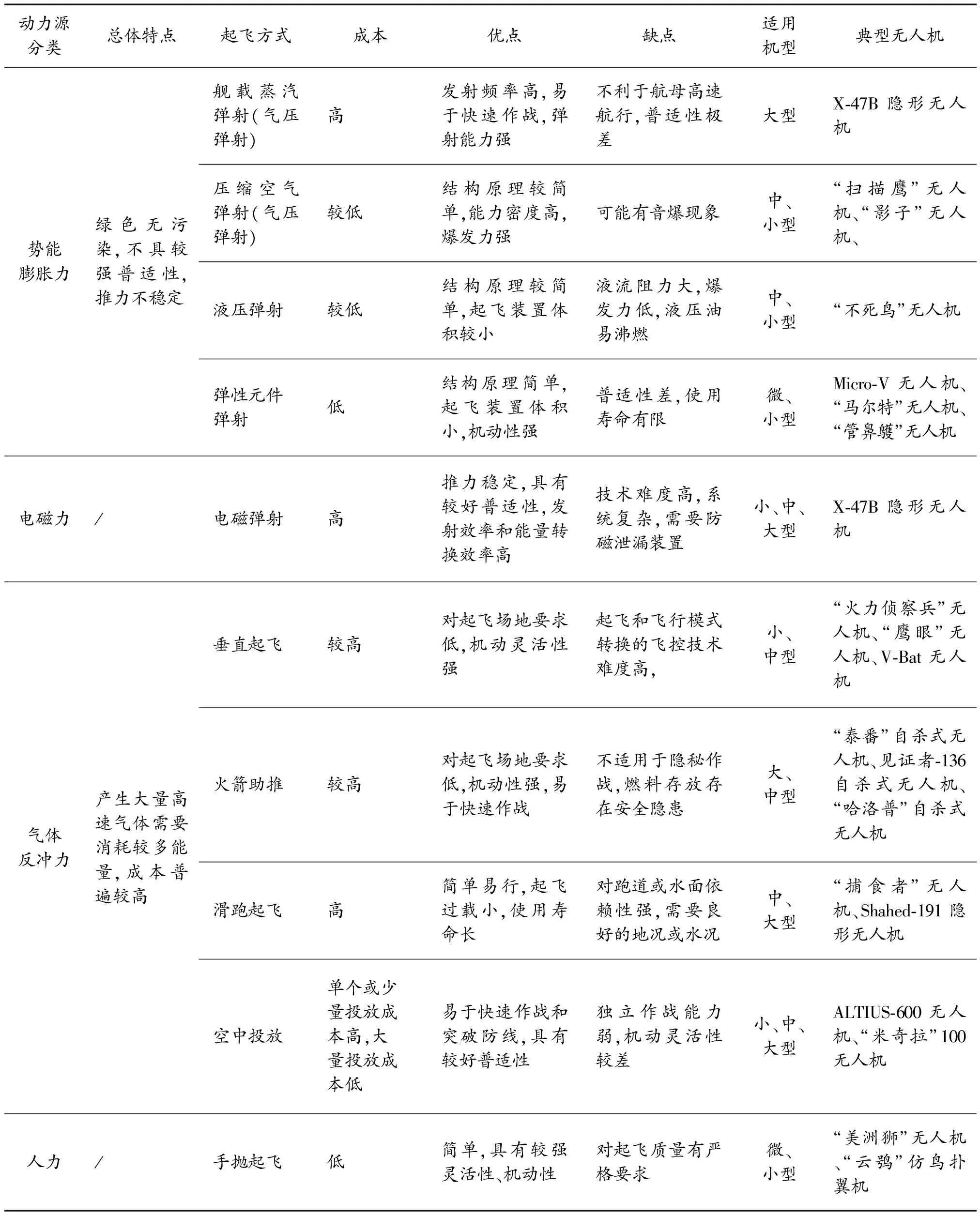
表3 无人机起飞方式对比
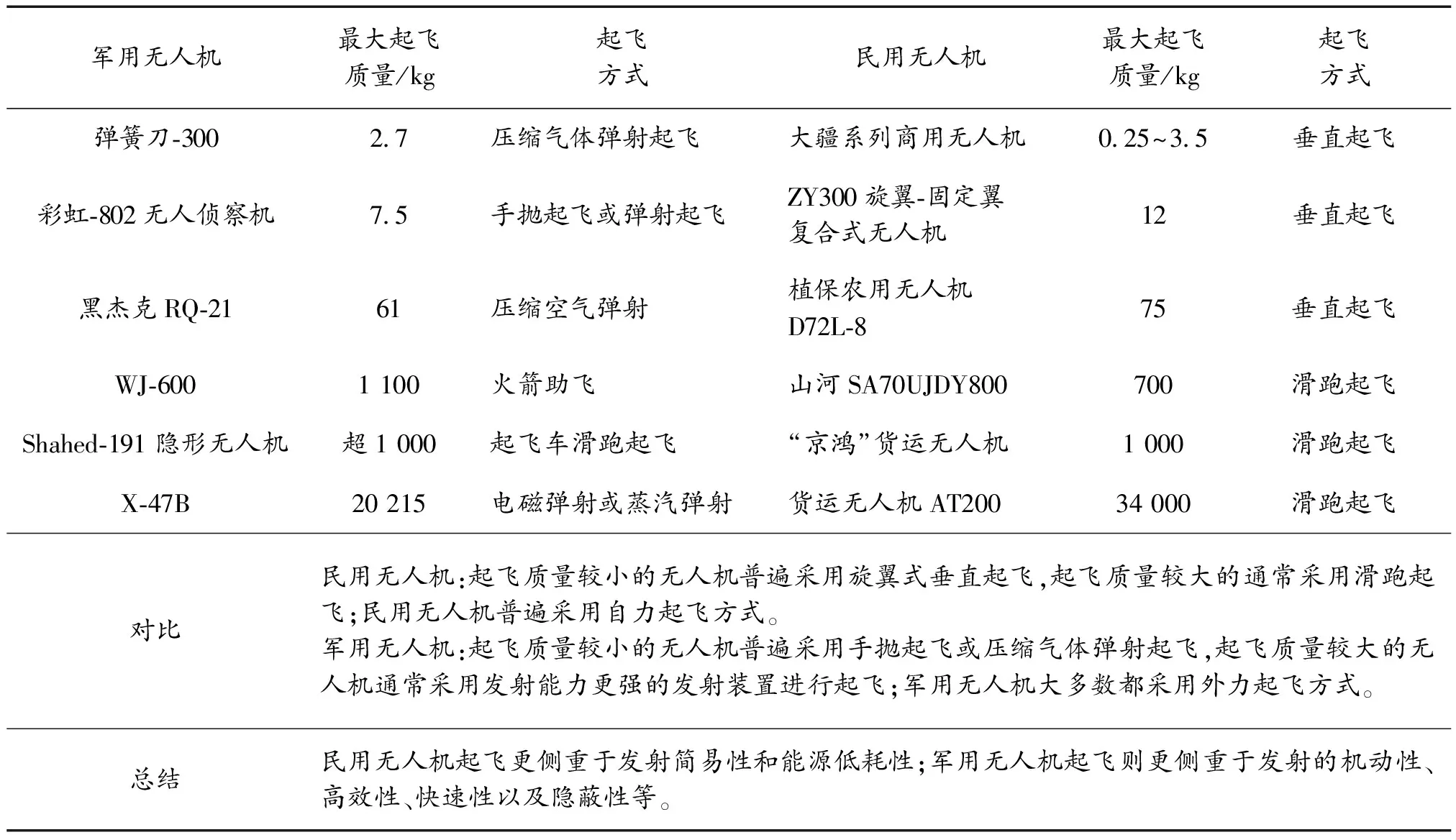
表4 军用无人机和民用无人机对比
7 结论
目前的无人机起飞技术已经完全满足一些起飞需求较低的起飞任务,例如常规的轮式滑跑起飞、民用的多旋翼无人机垂直起飞等。但对于一些起飞需求较高的起飞任务,仍存在诸多短板和缺陷,特别是在军事领域上,一种优秀的作战无人机起飞方式需具有较强机动性、复杂环境适应型、发射快速性、隐蔽性、灵活性、普适性等。所以未来无人机起飞技术的优化和创新将以更高的无人机起飞需求为导向进行发展。
基于对之前无人机起飞技术的分析归纳,针对无人机起飞技术领域的发展方向以及关键技术研究做以下4点展望:
1) 电磁弹射未来发展
目前只有中国和美国成功研制并应用了舰载电磁弹射器。电磁弹射比传统的蒸汽弹射器具有更高发射效率和能量转换效率,更安全可靠,而且可以根据不同的飞机调节发射力度。但电磁弹射需要消耗大量的电能,目前的能源条件还不足以让电磁弹射得到普及。除此之外,还需解决一些技术难题,例如如何保证发射平稳、减少对飞机结构的损伤、提高发射频率等。只有解决了这些能源和技术问题,才能使电磁弹射普及成为可能。
2) 新能源起飞装置研究
随着无人机在军民两领域的应用逐渐扩大,只在现有起飞装置上进行更新进步是不够的,还需要进行新能源起飞装置研发。而且我国气/液压弹射这种传统起飞技术与国外的差距较大,许多气/液压传动的精密部件过度依赖进口。所以应当大力开展新能源起飞装置研究,以我国新能源技术迅猛的发展为基础,进行新能源起飞装置的研发,例如电机作为动力源的起飞装置等,使我国实现在无人机起飞领域的弯道超车。
3) 倾转式无人机飞控技术研究
在垂直起飞的无人机领域中,倾转式无人机优势显著,例如对起飞场地要求低、机动性和灵活性强等,同时它也兼顾了固定翼无人机和旋翼无人机的优点,不仅具有良好的巡航能力,也能实现长时间悬停。但目前倾转式无人机飞行模式转换时仍存在较大的不可靠性和较差的安全性,所以在未来研究中,倾转式无人机的飞控技术必定是主要研究方向。同时可以结合目前人工智能领域的诸多算法,对飞控技术进行优化和提升。
4) 仿鸟扑翼式无人机关键技术研究
与同为垂直起飞的旋翼无人机相比,仿鸟扑翼式无人机更节能、更隐蔽、更机动,所以近年来针对它的研究越来越多。然而仿鸟扑翼式无人机的能源动力技术和飞行控制技术仍是限制其广泛应用的重要原因。针对能源动力技术未来的研究方向是设计更高功率密度和能量密度的电池以及更高功率质量比的微电机。飞行控制技术不但影响着机体的机动灵活性,而且也是飞行器实现避障、导航、轨迹规划等功能的基础。所以未来需要更多接近鸟类行为的实验,研究出更居精准性的飞行控制技术。