国外磁扫雷具装备及技术发展
2024-02-02陆斌杰张晓兵戴忠华
陆斌杰,张晓兵,戴忠华
(1.海军工程大学 兵器工程学院, 武汉 430033; 2. 92279部队, 山东 烟台 264003; 3.军事科学院国防科技创新研究院, 北京 100071)
0 引言
水雷是海军作战中的非对称武器之一。无论是沉底雷、锚雷、漂雷,都有能力拒止敌军进入咽喉要道、港口、两栖登陆点,甚至深水通道,是非常有效的反介入/区域拒止武器[1]。水雷战(mine warfare,MIW)是当今世界各国关注的热点,各国都在致力于建设和改进反水雷(mine countermeasures,MCM)能力[2]。MCM分为被动MCM和主动MCM任务。被动MCM旨在通过消磁、减振降噪、降低航速、消电等技术手段降低舰船的磁、声、水压、电信号来提高舰船隐身能力。主动MCM旨在通过扫雷、猎雷、炸雷等技术手段干扰压制、摧毁水雷。
扫雷技术包括扫雷具平台技术和扫雷具场源技术。按扫雷具平台技术分为拖曳式和艇具合一式。扫雷具磁源包括磁场、声场、水压场、电场源等4种场源。文献[3-4]研究了各国在无人水下航行器(unmanned underwater vehicles,UUV)方面的应用及最新成果,强调了UUV续航能力强、机动性强、隐蔽攻击能力强的特点,提到了UUV在扫雷上的应用。文献[5]基于水下无人潜航器(UUV)、无人机(UAV)、无人艇(USV)对国外无人扫雷装备技术作了系统的梳理,侧重于遥控方式、功能拓展等方面的研究。文献[6]研究了无人作战体系协同扫雷系统的概念,对多无人平台集群智能组网扫雷进行了深入分析。文献[7]针对动力、控制、布放回收等技术对扫雷UUV进行了相关研究。文献[8]着眼于国外扫雷USV的最新发展,以扫雷无人艇型号为主线分析了各国的发展路径。文献[9]研究了各国针对浅水扫雷发展的无人扫雷系统以及各平台协同扫雷技术。文献[10-12]分别从无人作战、作战思想、力量编成等方面探讨了美国反水雷能力建设现状及发展路径。文献[13]研究了潜载反水雷UUV的布放、回收、协同等关键技术。文献[10]分析了美国扫雷技术路线的发展,发展理念由以平台为中心向以能力为中心转变,并从航空、水面、水下3个空间维度和时间维度上总结了扫雷装备技术的发展。文献[14]研究了直升机机载扫雷技术,对部分机载拖曳扫雷具的性能参数作了相关分析。
上述绝大部分文献分析的是世界各国在扫雷具平台技术上的研究进展,但对扫雷具场源技术的研究较少。然而扫雷技术的核心在于扫雷具场源技术,其中磁场源技术是最为重要和普遍应用的技术之一。因此,有必要研究各国磁扫雷具技术,为我国磁扫雷具研究和水雷对抗磁扫雷具研究提供参考。
磁扫雷具能够产生磁场诱动带磁引信的水雷。磁扫雷具按磁源类型分为永磁式和电磁式。电磁式分为螺线管式、电极式、环圈式。磁扫雷具按扫雷模式分为目标模拟模式(target emulation mode,TEM)和水雷设定模式(mine setting mode,MSM)。TEM旨在产生与特定类别舰船非常相似的磁性特征,从而引爆具有精确识别舰船磁场能力的水雷。模拟目标舰船磁场的扫雷称为TEM。目标模拟式扫雷的前提是掌握被模拟舰船磁场特征。MSM针对特定灵敏度和逻辑的水雷。2种扫雷模式的本质区别在于,TEM目的是清除可能对模拟舰艇构成威胁的水雷,而不考虑水雷的灵敏度、设置或逻辑。MSM目的是为了提高对付逻辑和灵敏度已知的水雷的性能,并且扫雷范围更大。
为了详细论述磁扫雷具的发展现状,基于磁源类型,分别研究永磁式、螺线管式、电极式3类磁扫雷具,对比了各型磁扫雷具装备和技术路径的发展现状,从而为磁扫和抗磁扫提供相应参考。由于环圈式扫雷器为闭环式载流电缆结构,在工作时需要展开器,且在水中所受阻力巨大,扫雷效率低。按扫雷具技术发展和军事应用看,近年来,新发展的环圈式扫雷具极少,已逐步退出历史舞台,故不对其进行详述。
1 永磁式磁扫雷具
永磁式磁扫雷具磁场由铁磁体剩磁产生,不依赖于海洋环境,不受海水盐度、海水电导率、海洋分层结构、海水温度等的影响。
1.1 永磁式磁扫雷具装备
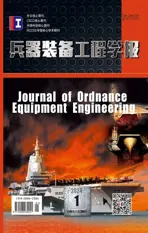
澳大利亚装备了Thales公司研发了联合感应扫雷系统(combined influence sweep,CIS),如图1所示。磁扫雷具包括Dyads、磁水雷干扰器(magnetic mine jammer,MMJ),如图2所示。Dyads可以通过磁体的线性阵列配置产生与选定级别的舰船类似的磁场。扫雷磁场可以通过改变阵列中Dyad的数量、极性以及每个Dyad的距离来改变,具备目标模拟模式和水雷设定模式2种模式。根据地理位置的改变优化信号特征结构以反映舰船磁场特征。Dyads有2种尺寸:Mini Dyads和Maxi Dyads,具体参数如表1所示。Mini Dyads用于模拟消磁战舰到中型驱逐舰(取决于消磁线圈的设置和效率)以及较小的商船;Maxi Dyads用于模拟航母级别的消磁战舰和大型商船。Dyads能够产生三分量磁场,模拟舰船磁场的空间和时间特征。由DSTO和Thales公司开发的MMJ能够在扫雷的不同位置改变横向磁场和垂向磁场,以逼近舰船磁场特征。MMJ可以安装鳍片,被托曳于水中时产生旋转磁场,从而封闭水雷。

图1 澳大利亚“CIS”
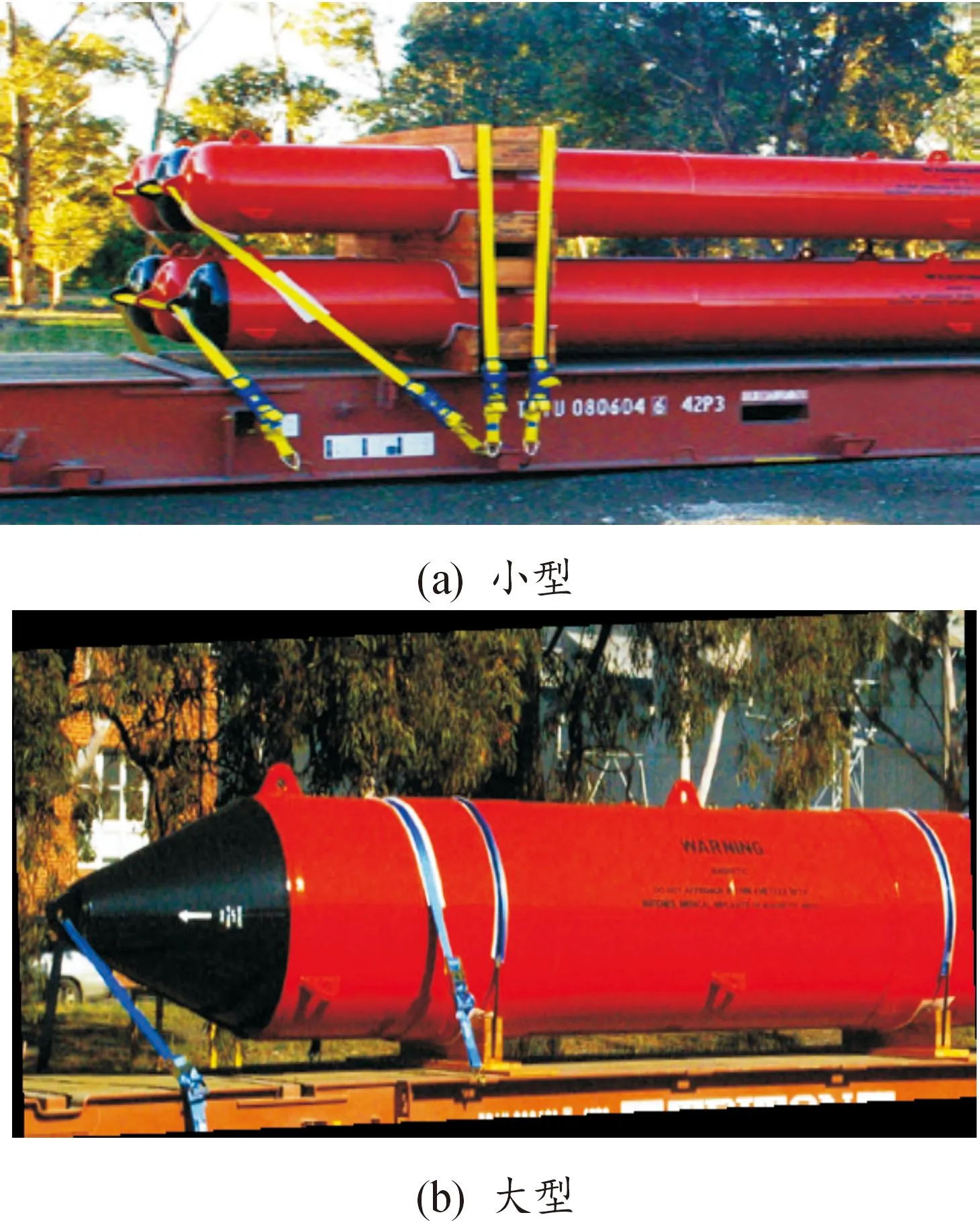
图2 Dyads
表1 Dyads参数
1.2 永磁式磁扫雷具技术研究
美国海军研究生院Ludwig提出了多水下无人扫雷艇编队控制方案,该方案采用主从模式,多艘从属无人艇在主艇监督控制下协同作业,从而实现对雷场的最大覆盖[15]。特别指出的是,因其中某艘艇由于引爆水雷而导致被毁时,主艇会重新分配其他艇替代被毁艇。主艇位雷场区域外(锚泊或机动),远程遥控无人艇编队进入雷场扫雷。为了扫除磁感应式沉底雷,无人艇上携带足够强的永磁铁。
2 螺线管式磁扫雷具
螺线管式磁扫雷具包括带磁芯的螺线管式磁扫雷具、超导磁体螺线管式等类型。螺线管式磁扫雷具可采用常规扫雷、定点扫雷等扫雷方法。定点扫雷方法是指通过改变线圈电流来改变3个磁化方向的磁矩,在无需移动或拖曳的情况下,使水雷和扫雷具的相对位置固定,也能较好地模拟舰船特定方向的通过特性,同时磁场三分量正交,操作更简便[16]。
2.1 螺线管式磁扫雷具装备
瑞典SAAB公司2008年开发了自航声磁扫雷具SAM3,该扫雷具为远程遥控USV,采用两轴磁场发生器,能够精确控制艇体的纵摇角和横摇角,使甲板上的线圈产生稳定的垂向磁场,具备目标模拟式和水雷设定式2种扫雷模式。艇长14.4 m,船宽6.7 m,吃水1.2 m,排水量14 t,最高航速12 kn,扫雷航速8 kn,扫雷续航80 h,如图3所示。

图3 SAM3
2012年,荷兰遥控感应扫雷系统(netherlands remote controlled influence minesweeping system,NLRCIMS),采用USV拖曳线列阵螺旋管磁扫雷具,如图4所示。

图4 NLRCIMS
超导磁体能够在较小尺寸内以高电流密度持续工作,为制造新一代自主、稳定爆炸和有效的扫雷具提供了技术支撑。相比于电极式电磁扫雷具,超导电磁扫雷具从高导电性的盐水过渡到低导电性的淡水时,磁场基本不受影响。
1976—1988年期间苏联开发了世界上第一个超导磁体自航反水雷(self-propelled mine counter measure,SPMCM)装备[17]。磁体参数为:内径420 mm,外径630 mm,高度540 mm,工作电流160 A,最大磁矩6×105A·m2。磁体磁轴垂直于海面。对前进速度、超导磁体旋转频率、超导磁体磁矩的协同控制,提高对不同舰船磁场的模拟精度。扫雷具航速22~27 kn。单个旋转磁偶极子或几个旋转磁偶极子的组合可以精确地模拟消磁舰船的典型磁信号。
美国于1998年研制了先进轻量感应扫雷系统(advanced lightweight influence sweep system,ALISS),如图5所示[18]。超导磁体参数为:内径1 m,外径1.15 m,厚度0.15 m,高度0.308 m。

图5 ALISS Fig.5 ALISS
美国超导公司于1999年12月完成了用于机载超导扫雷系统的超导磁体的制造[19]。磁体由单层高温超导线圈缠绕在457 mm芯轴上组成,线圈匝数为253匝,线圈长0.9 m,磁矩达15 kA·m2,工作电流为381 A,电感11 mH。美国QinetiQ公司2003年浅水感应扫雷系统(shallow water influence minesweeping system,SWIMS)采用半自主USV搭载基于轻型超导磁体的螺线管磁扫雷具。该螺线管长3.2 m,直径0.46 m,用于浅水扫雷。2005年为海军研究办公室设计、制造并测试了一种用于机载扫雷的高温超导磁体系统模型,用于制造SWIMS的升级版OASIS。OASIS采用MH-60S直升机拖曳,扫雷航速40 kn,扫雷深度25 m。磁体的磁矩为 8×104A·m2,磁体是由16层超导线组成的螺线管,线圈内径为455 mm,外径为476 mm,长度为914 mm,工作电流193 A,能以26 A电流进行频率为0.5 Hz的调制[20]。美国海军于2021年发布正在研究基于高温超导磁体的闭环扫雷具MAGNUSS,将其搭载于柴油驱动的铝制USV上,采用无拖曳式电磁扫雷模式[21],如图6所示。

图6 MAGNUSS
2.2 螺线管式磁扫雷具技术研究
美国Textron公司于1992年发明了一种气垫船无人扫雷具[22]。该系统能够在载具下方产生强大的磁场,该磁场在所有方向上延伸范围足够远,能够在水雷杀伤半径外引爆水雷。磁场发生器由安装于甲板的4个闭环线圈组成,一个线圈安装于水平甲板面上,另外3个线圈沿扫雷具纵向间隔安装于甲板的垂直面上。英国Thales公司于2017年研制了一种磁场可控的带磁芯螺线管式电磁扫雷具[23]。不同于空心螺线管和带铁芯的螺线管,该设计中采用的磁芯为具有低居里温度、高磁导率、低剩磁的磁性材料。当扫雷具工作时,将磁芯温度降低到居里温度以下,此时带磁芯的螺旋管产生比一般带铁芯的螺旋管更强的磁场,同时可以通过调节温度和电流精确控制螺线管的磁场。当扫雷具不工作时,将磁芯温度升高到居里温度以上,此时带磁芯的螺线管的磁场强度几乎为0,即磁芯剩磁极低。该设计有助于提高螺线管电磁扫雷具工作效率,同时便于扫雷具的存储和运输。Golda等[24]于1992年研究了超导扫雷,在圆柱形轴上缠绕超导导线构成的螺线管式电磁铁。采用有限长螺线管磁场近似计算公式计算超导磁体螺线管的磁矩、磁场、扫雷面积、扫雷速率。日本东芝公司于2001年公开的专利展示了基于超导线圈的电磁扫雷具。扫雷艇采用延伸到海面上的200~300 m长的铜线拖曳拖曳体并联阵列(2~3个),各拖曳体间保持一定横距。超导线圈饱和电流为200 A,线圈直径1 m。澳大利亚政府于2008年公开了一份超导电磁扫雷具的专利[25]。单个超导体磁结构包括至少3个超导线圈(纵向线圈或螺线管、垂向线圈、横向线圈)作为三轴磁源,多个超导体磁结构组成拖曳阵输出固有磁场分量和可变磁场分量,用于模拟舰船固有磁场和感应磁场。该扫雷具具有目标模拟式和水雷设定式2种工作模式。根据扫雷具工作海域和纬度、航行时间、航向的不同,控制各线圈的电流以调节线圈磁矩方向和大小。在远场条件下,采用磁偶极子模型计算单个超导体磁结构产生的磁场。采用单个或多个超导体磁结构阵列模拟舰船磁场。磁偶极子的磁矩三分量分别由舰船纵向磁化强度、横向磁化强度、垂向磁化强度决定。磁化强度由固有磁化强度和感应磁化强度组成。
3 电极式磁扫雷具
电极式磁扫雷具的磁场由导线电流和分流电流产生。电极式磁扫雷具的磁场依赖于海洋环境,受海水盐度、海水电导率、海洋分层结构、海水温度等的影响。
3.1 电极式磁扫雷具装备
美国海军于2005年在SWIFT上装备了基于远程操作USV扫雷任务模块,搭载于一个11 m长的刚性充气艇上。该系统由一个电极式电磁扫雷具组成,在USV的开环概念下,2个电缆电极将从船横梁上拖出,其中一个电缆电极连接到绝缘扫描电缆的一端,以在海水介质中产生电极分离。施加在一个电极上的直流电流通过海水中的“开环”路径返回到第2个电极,从而产生磁场[26]。
2009年,芬兰的TietoSAAB公司研制了低航速(7~10 kn)目标模拟式扫雷具,采用模块化设计,利用二维线圈、三磁体模拟舰船三分量磁场。2011年,ATLAS研制了集装箱式综合水雷对抗系统(containerized integrated mine countermeasures system,C-IMCMS),如图7所示。采用基于快捷灵活技术(flexible agile sweeping technology,FAST)的USV,艇长11.5 m,为刚性气垫船。
图7 C-IMCMS
2012年,美国Exelis MDS公司为搭载于MH-53E海龙直升机的MK-105 Mod 4电极式电磁扫雷具进行了升级,如图8所示。直升机在其后面大约137 m处,以20~25 kn速度拖曳2根大约152 m长的导体电缆,最浅扫雷深度为4.5 m[27]。电极阵列通以直流电产生磁场,模拟水面舰船的磁场特征[28]。

图8 MK-105 Mod 4
2013年,瑞典Polyamp公司研制了能够模拟长度达150 m舰船磁场的磁扫雷具,如图9所示。采用具有高电流和高功率的可漂浮电极。MSS2000还可以增加一个交流杂散场,使直流和交流场都形成一个完整的拟舰船磁场。扫雷磁场由软件控制,可以随时选择新的目标磁场。

图9 基于MSS2000的扫雷艇
美国Textron公司于2022年交付美国美国海军无人感应扫雷系统(unmanned influence sweep system,UISS)[29],如图10所示。UISS采用通用无人水面艇(common unmanned surface vehicle,CUSV)拖曳单根磁性电缆产生磁场,该电缆为同轴结构的高温绝热电缆,采用低腐蚀电极。CUSV艇长11.3 m,艇宽3.5 m,排水量10 t,吃水0.66 m,最大拖曳力2 260 kg,最高航速20 kn[30]。

图10 UISS
3.2 电极式磁扫雷具技术研究
美国海军研究生院Sam Poteete采用N层磁模型预测磁性扫雷设备在由N层组成的复杂环境中的预期性能,分别对直开口式、斜开口式2类电极式电磁扫雷具进行了磁场仿真计算。每层都具有任意的导电性和厚度。该模型使用随机环境垂直电导率结构计算美国海军各种磁扫雷配置产生的磁场强度。为了更好地确定哪些参数对模型的影响最大,哪些参数可以简化或增强,在实际数据集上进行了一系列测试[31]。
美国EDO公司于2004年公开了一份电极式电磁扫雷具的设计[32]。该扫雷具仅拖曳一根电缆,采用双电极结构,阳极电极由拖曳于扫雷具上的单根电缆连通到海水,另一端阴极电极由扫雷具本体或扫雷具表面的嵌入式电极充当。直流电源产生直流电平或相对低频(脉冲)电流来产生磁场。扫雷具参数如表2所示。
表2 EDO开环式电磁扫雷具参数
日本环球造船公司于2012年公开了一份电极式扫雷具的专利。该专利中包含直开口式和斜开口式2类电磁扫雷具。扫雷具装有高精度磁强计,能够实时检测地磁场强度、扫雷具与地磁场合成的磁场强度,从而根据航向、纬度等变化,实时调节输出电流,控制磁场变化。
4 多磁源式磁扫雷具
多磁源式磁扫雷具是指集成了上述2种以上磁扫雷具的多功能磁扫雷具,可以根据任务需要使用不同的扫雷具进行扫雷。
4.1 多磁源式磁扫雷具装备
挪威海军2018年装备了ATLAS的远程联合感应扫雷系统(remote combined influence minesweeping system,ARCIMS),如图11所示[33]。ARCIMS包括一艘USV,长11.2 m,宽3.4 m,吃水0.6 m,排水量10.5 t,扫雷航速6~15 kn,最高航速40 kn。后面拖曳一个传感器单元,该装置使用磁、声和电技术来消除不同类型的水雷。系统由一个便携式指挥中心控制,该中心可以设在海上或陆地上。USV拖曳3艘线圈辅助艇、直开口式双电极,产生电场和磁场,具备MSM和TEM 2种模式。英国皇家海军于2022年底同样接收了ATLAS Elektronik英国公司的3艘“世界级”的ARCIMS[30,34]。

图11 ARCIMS
4.2 多磁源式磁扫雷具技术研究
法国Thales公司于2003年公布了一型多磁源联合感应扫雷系统的设计,集成了螺线管式、环圈式、电极式等3类磁扫雷具的特点[35]。3台扫雷具通过电缆首尾相连,扫雷具间有电缆形成2组卵形环状的水平回路,前2台形成一个回路,后2台形成一个回路,回路通过一组分流器保持打开状态,回路电流产生垂向磁场。每台扫雷具前腹部装有电极,两电极间因电位差而产生流经海水的分流电流,该电流产生横向磁场和纵向电场。电流发生器产生电流,电流通过电极流经海水并流入另一扫雷具的电极,再通过间接扫雷具的电缆流向源扫雷具,从而构成回路。通过控制电极的输出电流,在两电极间形成不同的电位差。如在前2个电极间形成直流分流电流,模拟舰船前半部分的静磁场;在后2个电极间形成低频交流分流电流,模拟舰船腐蚀相关电流经螺旋桨主轴调制后产生的极低频磁场,以及舰船轴系旋转产生的极低频磁场。扫雷具内部配备带铁芯的螺线管,可产生纵向磁场。
德国Siemens Energy Global公司于2022年公开了一份多无人潜航器联合磁扫雷系统的方案。无人潜航器内部至少搭载一组永磁铁或磁线圈,通过在远离水雷的海域进行特定的多自由度运动(平移、滚转),从而在目标区域形成给定类型舰船的随时间变化的磁剖面。无人潜航器编队中的各潜航器通过不同的机动来产生复杂的磁场信号,从而高精度模拟特定的舰船。整个扫雷系统能够在到达目标位置之前,在目标位置产生引爆水雷所需的磁信号。无人潜航器安装有多个磁线圈,分别安装于前部和后部。磁线圈采用矩形线圈,采用磁四极子来分析无人潜航器磁场。磁线圈可采用直流或交流馈电,从而控制磁场幅值。在无人潜航器前部区域安装环形圆盘永磁铁。无人潜航器结合磁线圈电流变化和多自由度运动,协同控制磁场变化。无人潜航器进行相应旋转,可以对目标位置处产生的磁场进行有效的控制。
5 磁扫雷具性能对比分析
5.1 磁场数学模型
磁扫雷具的磁场特性是决定扫雷具扫雷性能的关键因素,要准确掌握磁扫雷具的磁场分布,必须进行大量实测,但是实测数据的获取费时、费力,同时又难以掌握全部扫雷具的磁场数据。因此,必须研究磁扫雷具的技术体制、磁场发生机理、磁场来源、模拟模式等要素,构建磁场数学模型。经过查阅大量文献,对上述此扫雷具的磁场数学模型总结如表3所示。
表3 国外磁扫雷具装备及技术体制
分析磁扫雷具磁场数学模型可知,磁性源磁扫雷具的基本数学模型为:磁偶极子、时谐磁偶极子、磁四极子、有限长载流直导线、载流线圈、有限长空心螺线管、有限长带铁芯的螺线管、旋转椭球体。电性源磁扫雷具的基本数学模型为:点电极、线电极、电偶极子、时谐电偶极子、点电流源。
通过对以上基本模型的优化组合,可以构建各型磁扫雷具的磁场数学模型,进而可以通过仿真计算各磁扫雷具的磁场分布。
5.2 对舰船磁场模拟精度定性分析
由表3可知,螺线管式磁扫雷具可以采用单轴磁偶极子或单轴磁偶极子阵列模型计算磁场,只有纵向磁矩,仅产生纵向磁场,对舰船磁场模拟精度一般[36]。
单磁体永磁式磁扫雷具可以采用单轴磁矩旋转椭球或单磁偶极子模型计算磁场,且仅有单一方向磁矩,模拟精度不高,且单磁体永磁式磁扫雷具的磁场不可任意改变。线列阵永磁式磁扫雷具可以采用旋转椭球体阵列或磁偶极子阵列模型计算,能够通过磁体的位置、间距、极性调整来产生需要的三分量磁场。因此,线列阵永磁式磁扫雷具模拟精度较高。但问题在于永磁体磁矩不可控。
可变磁矩线列阵磁扫雷具对舰船磁场的模拟精度更高,同时具备MSM和TEM模式,能够扫除多种类型的水雷,应用范围更广。
超导式磁扫雷具采用磁偶极子模型计算磁场,其特点在于小尺寸、大电流、大磁矩,当需要产生极强磁场的应用场景中,超导式磁扫雷具具有明显优势。但问题在于其对磁场的模拟精度跟螺线管式类似,且其使用维护难度大,其发展取决于常温超导技术的突破。
电极式磁扫雷具的磁场计算取决于分层介质的选择、海洋环境、电流频率、电极配置、拖曳方式、电缆长度等因素。因此,有必要研究分层介质中的磁场分布和传播规律。通过控制电流大小、频率、波形及扫雷航速,能够在目标区域形成模拟舰船磁场剖面,模拟精度较高。基于无人平台的电极式扫雷具解决了因磁场前伸过大而对拖曳舰艇造成危险的问题,同时,为提高磁场规则度和扫雷效率,采用直开口式双电极构型。
6 结论与展望
对国外基于永磁式、螺线管式、电极式3类磁扫雷具作了系统的梳理,从中可以看出,磁扫雷具技术的发展路径集中于以下几点:
1) 无人化:大量USV、UUV、AUV被应用于扫雷,雷区外实现远程精确遥控,对军事人员的安全性保障大幅提升。
2) 模块化:不同功能组件被封装于不同的设备,从而提升装备可靠性,同时能够快速更换备件,提高装备可维护性。
3) 复合化;对不同类型的磁源的组合,能够产生复杂的磁场,从而提升对目标舰船磁场的模拟能力。
4) 精确化:随着量子技术等新兴磁传感器技术的不断发展,磁传感器的灵敏度越来越高,对于舰船轴频磁场等细微磁场的模拟也越发紧迫,从而全面改善磁扫雷具对舰船磁场的复刻能力。
综上所述,磁扫雷具磁源技术的研究仍集中于永磁式、螺线管式、电极式等几大类,研究方向多为对单一种类的磁源进行线列阵组合、对不同磁源进行集成等方面,在磁扫雷具基本构型和新磁源研究方面没有太大的进展。由此结合各国最新发展的装备技术,可知线列阵磁扫雷具和电极式磁扫雷具是当下的主流。
上述研究为研究磁扫雷具的磁场建模、发展方向、水雷的抗磁扫等提供了一个可供参考的研究方法。受限于当前条件,文中仅对目前主流的磁扫雷具进行了研究,且仅给出了磁扫雷具的数学模型。下一步工作的重点是开展磁扫雷具的数学模型仿真试验研究、水雷抗磁扫研究、水雷与磁扫雷具对抗研究。