控制软抓取器的电流变阀门的设计与性能探究
2024-02-02甘文萱
甘文萱
(香港城市大学, 香港特别行政区 999077)
0 引言
与传统的刚性机器人相比,软体机器人具有一系列的优点,如容易变形[1]、耐磨损[2]、安全地在人体周围工作[3]、自由度高等[4]。所谓软体机器人是指不含(或包含很少)刚性结构的机器人,其身体基本上由柔软可扩展的材料(如硅橡胶)制成,可以变形并吸收碰撞产生的大部分能量[5]。这些软体机器人一般由流体[6]、形状记忆合金[7]、电介质弹性体[8]、离子聚合物[9]等方式驱动。其中流体驱动是目前最广泛的驱动类型之一。一般来说,流体驱动软执行器的内腔是一个简单的、可变形的弹性结构,可以依靠流体压力来使其膨胀或收缩。流体驱动分为气动和液动[10]。然而,由于空气的可压缩性,气动泵的精度很难控制,因此气动机器人需要一个比较复杂的管道系统[11]。相比之下,液动软执行器更适合于控制多个柔性结构。
有2种功能流体常用于驱动软体结构,一种是磁流变液,另一种是电流变液。这2种功能流体多用于直接驱动软体结构。磁流变液在磁场的作用下会随着磁场的增加而表现出屈服应力的增加。例如,McDonald等[12]介绍了一种磁流变流体阀门,它使用磁场来控制执行器内部的压力。这种阀门系统可以通过施加磁场简化流体控制的驱动方式,使机器人能够增加自主性。电流变液在电场的作用下会随着电场的增加而增大表观黏度[13]。例如Sudhawiyangkul等[14]介绍了一种集成了电流变微阀的多自由度软执行器,可以灵活地在狭小场景中完成工作,该软执行器将电流变微阀集成在了软体内部,结构紧凑小巧,运动灵活便捷。再例如Yoshida等[15]展示了一种微操作手,用于在狭窄的管道内工作,该微操作手的软体结构中同样嵌入了电极板,使得软体结构可以独立地控制运动方向和弯曲程度。Kim等[16]展示了一种基于MEMS的微型电流变阀,驱动器部分以悬臂的形式工作,该微驱动器将流体通道嵌入悬臂内部。利用上述结构,可以通过改变电场实现软体机器人的多种运动方式,其具有控制系统简单、轻量化等优点。目前,将电流变微阀集成在软体机器人内部是一种被广泛采用的方法,虽然其结构紧凑,但由于软体机器人的使用寿命普遍较低,高度集成的结构更换成本更高,并且可以适用的电流变液的制作难度也更高。
因此,针对当前电流变液驱动的软体机器人存在的诸多问题,如软体易损坏,内含微阀门的复杂腔体使得更换成本高、电流变液难以制得等,提出一种由电流变阀门控制的软抓取器。该软抓取器采用了模块化的思想,不同于软体内部结合微阀门的方式,它将阀门系统与软体部分分隔开来,形成一个独立的电流变阀门系统以及4个软体手指,具有结构简单、便于更换的优点,并且可以独立控制4条流道,以实现不同的抓取方式。此外,本文中重点研究了多个不同的影响因素对淀粉-硅油混合悬浮液的电流变特性的影响,分别是:电场强度、硅油黏度、两电极板之间的距离、电极板的长度和宽度。通过实验,定量地对电流变流体变刚度的性能进行了验证,为实现电流变液变刚度功能的最佳效果尽可能提供最优条件。
1 软抓取器的结构设计
图1是一个电流变液控制阀系统的原理图。这个阀门系统可以利用电流变效应控制电流变液的流动方向,即输出方向。它有1个入口、4个出口,入口和出口之间有4个大小相同的流道。每个流道两侧都有尺寸和位置均相同的电极片。电流变效应是由外加电场引起的电流变液的结构和流变特性的变化。电流变液通常是一种固液分散系统,它是由分散在低介电系数的液体绝缘介质中的微米或亚微米大小的易极化颗粒形成的复合悬浮液。电流变液在外加电场的作用下,可以在几毫秒的时间内发生明显的、可逆的反应,即表观黏度明显增加,液体呈现类似于凝固的状态。当电流变液被送入阀门系统时,通过改变施加电场的位置及强度,可以改变流体的流动方向和流动能力:施加电场的流道中的流体会增大刚度并堵塞流道,导致流体向未施加电场的方向流动。施加的电场越强,流体变刚度后堵塞流道的能力就越强。
图1电流变液控制阀原理图
图1中说明了电流变阀的3种不同情况。当电场施加在4组电极中的3组时,施加电极的流道被阻断,未施加电场的流道允许流体自由流动,因此该流道连接的一根手指可以弯曲。当对4组电极中的相对2组施加电场时,未施加电场的2条流道允许流体流入,对应的2个手指可以弯曲,实现夹持功能。当不施加电场时,所有4个通道都可以流入流体,因此4个手指可以同时弯曲,实现4指抓取功能。
由上述原理设计出了电流变控制阀的结构如图2所示,上中下3个零件组成一个内部有4条流道的阀门系统,可控制流体向4个不同方向流动。将阀门的输出端口和手指连接,这样,由电流变阀控制的软体抓手的完整结构就可以构建完成了,如图3所示。
图2 阀门结构示意图

图3 软抓取器整体结构示意图与实物图
2 电流变效应理论及流体堵塞能力的探究
2.1 电流变效应理论
电流变液是一种极化固体颗粒分散在绝缘介质油中形成的悬浮液。图4说明了电流变效应的原理。当不施加电场时,固体颗粒在绝缘油中随机分布,电流变流体类似于普通的牛顿流体;但当施加电场时,颗粒瞬间被极化成电偶极子,颗粒间的相互作用使固体颗粒形成链状结构或团状结构并稳定下来,产生屈服应力。表观粘度会瞬间增加,在去除电场后又会瞬间恢复到原来的状态。

图4 电流变效应原理图
2.2 电流变流体变刚度堵塞能力实验
为了更好地测试电流变效应发生之后流体变刚度能产生多大的堵塞压降,制作了一个简单的电流变流体控制阀系统,如图5所示。该系统由2流道组成。流道有1个统一的入口和2个独立的出口,其中一端与一个小型力传感器相连,另一端为自由端。自由端流道两侧的电极大小和位置均相同。传感器通过Arduino开发板将数据上传至计算机。在实验过程中,在自由端一侧的流道施加电场,电极所处位置的电流变液体瞬间变成凝固状,并堵塞流道。然后慢慢增加入口压力,观察自由端流道的堵塞何时被突破,这样就可以获得最大的堵塞压力。实验中,使用淀粉-硅油悬浮液作为电流变液,通过实验,量化了影响电流变液堵塞能力的不同因素,分别是电场强度、电极板之间的距离、电极的长度、电极的宽度、硅油的黏度。并对实验结果进行了分析。
图5 电流变流体控制阀系统
2.3 实验结果
2.3.1电场强度对流体堵塞能力的影响
电场强度是影响电流变液改变刚度能力的一个重要因素。随着电场强度的增加,电流变液的变刚度能力也会增加,这体现在突破其堵塞所需的压力也会增加。如图6所示,说明了电场强度和突破堵塞所需最小压力之间的关系。
本文中采用硅油黏度为50 cs,电极尺寸为28 mm×2 mm,电极间距为3 mm,电场强度分别取1、2、3、4、5 kV来进行本实验。从图6中可以看出,当电场强度增加时,突破堵塞物所需的最小压力也增加。

图6 施加电压与压力差值之间的关系
2.3.2硅油黏度对流体堵塞能力的影响
电流变悬浮液由易极化的固体颗粒和绝缘油组成,在本实验中,以淀粉作为易极化颗粒,用硅油作为绝缘液体。那么,硅油的黏度也是电流变效应的一个影响因素。如图7所示,图7中展示了硅油的黏度与冲破堵塞物所需的最小压力之间的关系。取10、50、100 cs等3种黏度的硅油,在电场强度为5 kV、电极尺寸为28 mm×2 mm、电极间距为3 mm的条件下测试。从图7中可以看出,随着硅油黏度的增加,突破堵塞物所需的最小压力也慢慢增加。
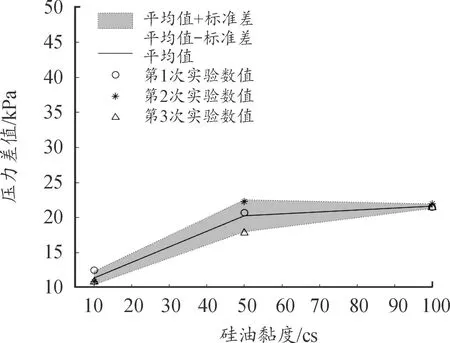
图7 硅油黏度与压力差值之间的关系
2.3.3两电极板间的距离对流体堵塞能力的影响
电极间的距离是电流变效应强度的重要影响因素之一。如图8所示,图8中说明了电极板之间的距离与突破堵塞物所需的最小压力之间的关系。用黏度为50 cs的硅油制作电流变悬浮液,在电场强度为8 kV、电极尺寸为28 mm×2 mm的条件下,取电极间距离为2、3、4、5 mm进行试验。结果显示当电极之间的间距增加时,突破堵塞物所需的最小压力就会降低,这意味着电流变液体的刚度会降低。

图8 两电极的间距与压力差值之间的关系
2.3.4电极板长度对流体堵塞能力的影响
电极长度是影响电流变效应强度的重要因素。如图9所示,图9中显示了电极长度与突破堵塞物所需最小压力之间的关系。用50 cs黏度的硅油制作电流变悬浮液,在电场强度为5 kV、电极宽度为2 mm、两电极间距为3 mm的条件下,取电极长度为20、24、28、32、36 mm。从图9中可以看出,当电极长度增加时,突破堵塞物所需的最小压力增加,这意味着电流变液的可变刚度增加。这是因为当电极长度增加时,电流变液变刚度部分的体积增加,所以堵塞能力明显增加。
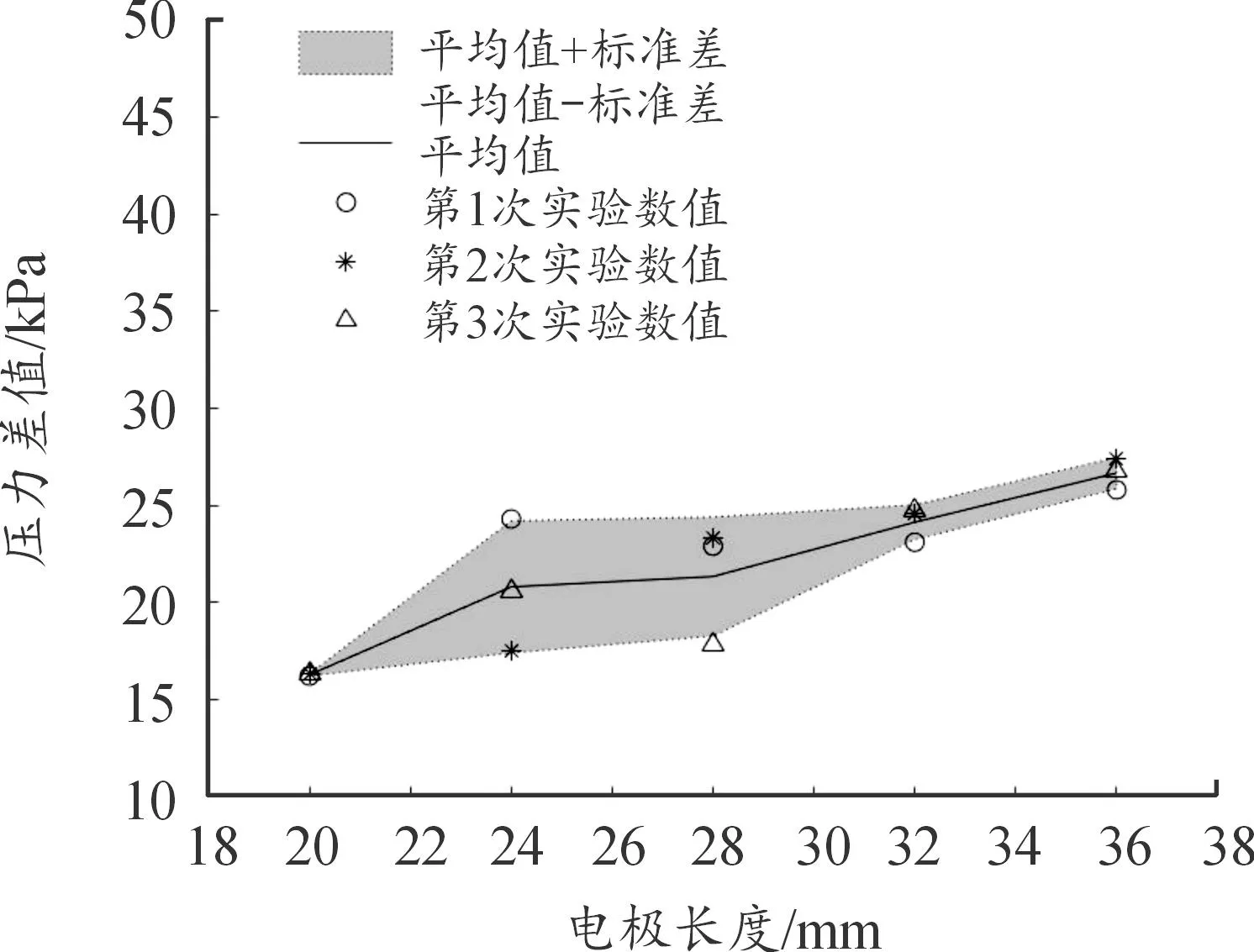
图9 电极长度与压力差值之间的关系
2.3.5电极板宽度对流体堵塞能力的影响
电极宽度也会影响电流变效应的强度。如图10所示,图10中展示了电极宽度与突破堵塞物所需最小压力之间的关系。用黏度为50 cs的硅油制作电流变悬浮液,在电场强度为5 kV、电极长度为28 mm、两电极间距离为3 mm的条件下,电极宽度分别为1、2、3、4、5 mm。从图10中可以看出,当电极宽度增加时,突破堵塞物所需的最小压力并没有明显变化。这是因为尽管当电极宽度增加时,电流变液变刚度部分的体积增加,按照常理,这应该使得堵塞能力显著增加。然而,当电极宽度增加时,通过单位截面的流量也会增加,所以这2种影响相互抵消,堵塞能力没有明显变化。
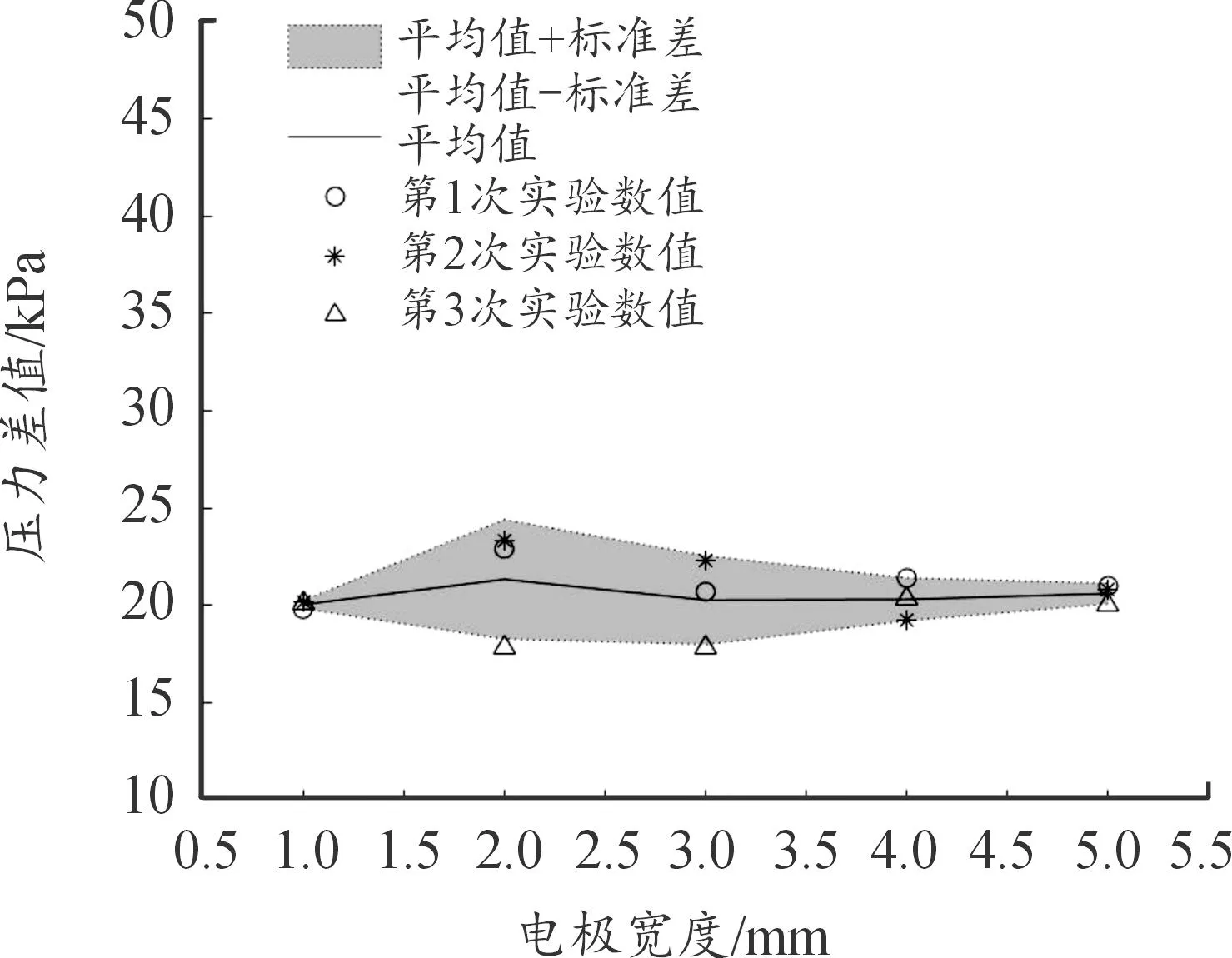
图10 电极宽度与压力差值之间的关系
3 软抓取器抓取性能验证
3.1 弯曲能力分析
有限元分析是对复杂结构进行力学分析的有效方法。在本节中,使用有限元分析软件Abaqus来研究基于Yeoh模型的软指的机械性能。
通过施加0.002、0.004、0.006、0.008、0.010、0.012、0.014 MPa的压力进行计算,结果如图11(a)—图11(g)所示,在手指的内腔中注入液体后,内腔的每一段都会膨胀,从而相互挤压,使手指的底部慢慢弯曲,压力越大,弯曲的角度越大,从而验证出软体手指弯曲能力和内部电流变液所施加的压力的关系。
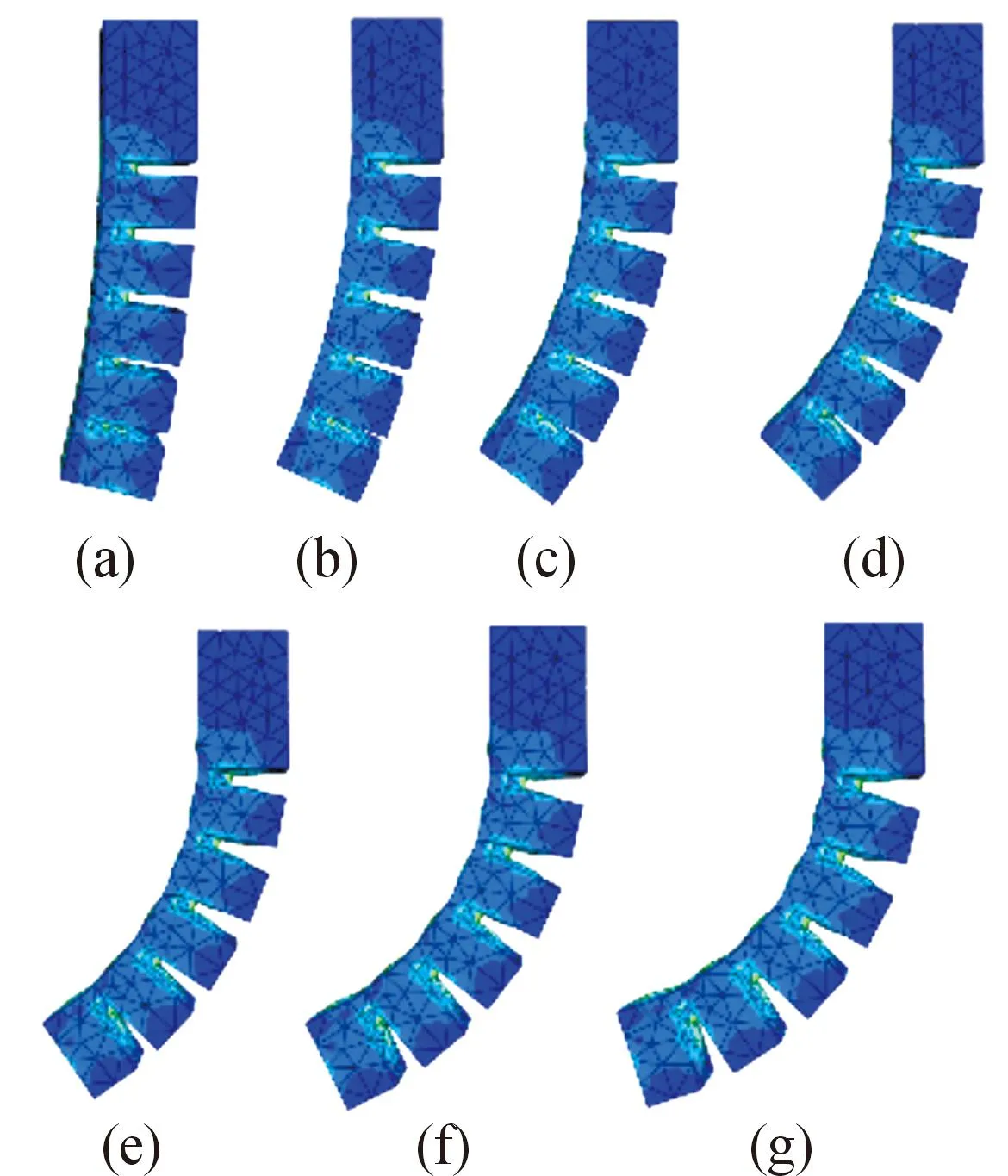
图11 有限元分析结果
3.2 抓取性能验证
本文设计的由电流变流体控制阀控制的软体机器人如图12所示,可以分别用1根手指勾住1个环状物体,用2根手指夹起1个扁平物体以及用4根手指抓取1个物体。在这个实验中,抓取的物品是圆环、扁平纸板和乒乓球,都是常见的物品。
实验开始时,一个注射器泵用于连接电流变流体控制阀系统,并将淀粉和硅油的混合悬浮液泵入其中。阀门的4组电极也被单独控制。
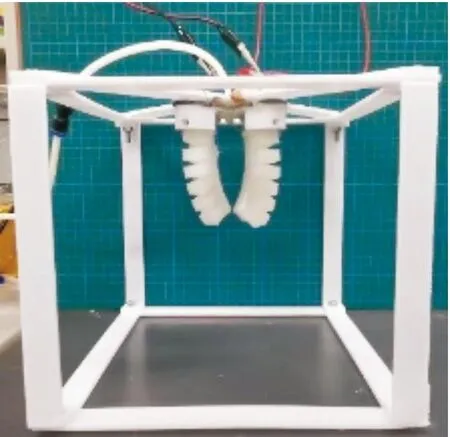
图12 样机示意图
3.2.1单根手指勾取圆环的实验
电流变阀4组电极中的3组与电压为5 kV的高压电源相连,而另一组电极则不与电源相连。打开注射泵的自动输入,将电流变悬浮液送入实验装置。此时,电场作用下的3个流道发生了电流变效应,电流变液已经变成固体状堵塞了流道,所以电流变液只能通过不施加电场的流道进入与其相连的手指。手指随着流体的流入而慢慢弯曲,并勾住了环状物。具体实验结果如图13所示。

图13 单指操作实验
3.2.22根手指夹持平板实验
高压电源连接到电流变阀中相对的2组电极,电压强度为5 kV,另外2组电极不与电源连接。打开注射泵的自动输入,将电流变悬浮液送入实验装置。此时,施加电场的2条流道中的电流变液会变硬产生堵塞,所以电流变液只能通入未施加电场的流道连接的2个软指。随着流体的流入,手指慢慢弯曲,并紧紧夹在平板上。具体实验结果见图14。

图14 2指操作实验
3.2.34根手指抓取球体实验
电流变阀的4组电极均未施加电场。打开注射泵的自动输入,将电流变悬浮液送入实验装置。此时,电流变液被同时注入4个手指中。手指随着液体的流入慢慢弯曲,抓住球体。具体的实验结果见图15。
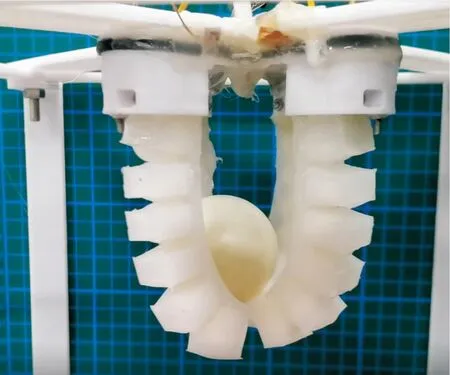
图15 4指操作实验
4 结论
本文中设计了一种用于控制软抓取器的新型电流变阀门。该电流变阀门采用模块化的设计思想,具有便于装配更换,控制系统简单等优点。
通过试验本文中还讨论了不同因素对电流变流体变刚度能力的影响。试验表明,电场强度、两电极板之间的距离、电极的长度、电极的宽度、硅油的黏度均对电流变流体变刚度能力产生不同的影响,具体体现为:
1) 电场强度增加,电流变流体变刚度能力增加;
2) 两电极板之间的距离增加,电流变流体变刚度能力降低;
3) 电极的长度增加,电流变流体变刚度能力增加;
4) 电极的宽度增加,电流变流体变刚度能力变化不明显;
5) 硅油黏度增加,电流变流体变刚度能力增加。
因此,利用试验结果,设计了一款由电流变阀门控制的软抓取器,并验证了其对不同形状物品的抓取能力。该项试验对电流变阀控制的软抓取器设计具有重要意义。后续应继续开展更全面的电流变流体的制备及特性分析。