耙吸挖泥船耙臂水下安全控制技术研究与应用
2024-01-30潘永军毕鹤鸣吴昊周昭旭
潘永军,毕鹤鸣,吴昊,周昭旭*
(1.中交疏浚技术装备国家工程研究中心有限公司,上海 201208;2.中国交通建设集团有限公司,北京 100088;3.中交疏浚(集团)股份有限公司,上海 201208)
0 引言
耙吸挖泥船是航道开挖、围堰造岛重器,广泛应用于疏浚工程[1]。随着计算机技术在21 世纪的发展,针对逐渐成熟的疏浚工艺以及作业流程,疏浚设备以及系统集成厂商已将全自动控制系统在部分船舶上得到应用[2]。
耙臂作为耙吸挖泥船水下施工的主要设备,受水下施工环境影响,操耙手无法直接观察耙臂实时状态,需采用感知技术监测耙臂水下姿态,通过人工干预保障耙臂水下施工安全[3]。为了更高效地保障耙臂水下施工安全,减轻人工操作的负担,本文在分析研究耙臂水下施工工艺过程的基础上提出一项耙臂水下施工安全控制技术,并与感知技术相结合,实现耙臂水下施工过程自动无人化控制。
1 研究背景及技术路线
1.1 耙臂系统
耙臂安装在耙吸挖泥船船舷两侧,单个耙臂系统配备3 台绞车及3 个吊架,由其实现整个耙臂施工过程控制,施工图见图1。
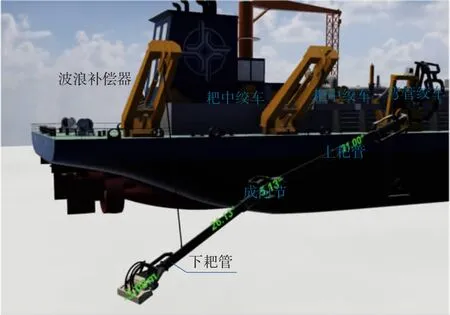
图1 耙臂水下施工图Fig.1 Underwater construction of suction tube
耙臂系统由疏浚台的绞车手柄控制耙头和耙中液压绞车实现水下施工,弯管绞车在水下施工时禁止动作,耙臂绞车水下施工工艺如图2 所示。
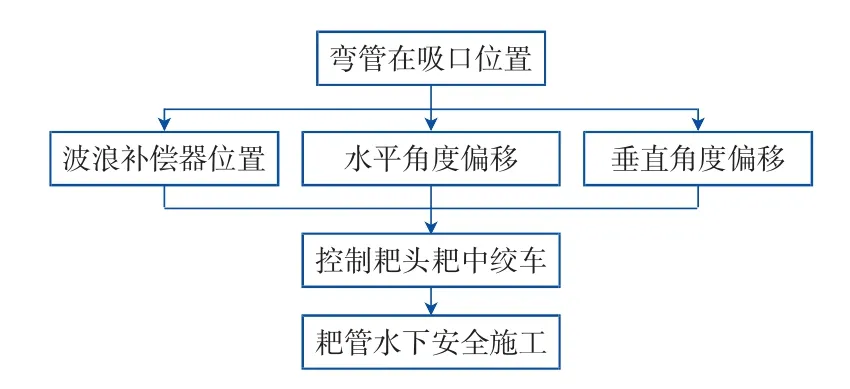
图2 耙臂水下施工控制方式图Fig.2 Control method for underwater construction of suction tube
当弯管绞车下放至吸口位置时,泥泵运行进入施工状态,耙头绞车控制耙头着地,耙中绞车控制万向节将上下耙臂保持在一定角度范围内施工。耙臂水下施工过程中,耙头波浪补偿器会随着耙头着地而弹起,而波浪补偿器的行程是一定的(约0~3 m),不能让波浪补偿器无限的弹起,在达到一定高度时需控制耙头绞车,将波浪补偿器行程控制在可控范围内;耙臂的万向节是柔性连接上下耙臂,下水后上下耙臂会随着耙头着地后地面拉力及水下浪流的影响,水平和垂直角度均会发生变化,当角度变化超出一定范围后,人工干预调节耙头或耙中绞车,将水平和垂直角度控制在安全范围内。
1.2 技术路线
耙臂水下安全作业控制受水下施工环境影响,操作人员无法直接观察耙臂在水下的实际情况,通过感知技术反馈的耙臂姿态进行人工干预,该过程存在着一定的滞后性,安全性存在隐患。针对人工操作的局限性,梳理了耙臂水下施工工艺技术,提出一项耙臂水下施工安全控制技术,在此基础上开展耙吸挖泥船耙臂水下安全控制研究[4]。针对耙臂水下控制3 种情况:波浪补偿器位置控制,耙臂水平角度控制,耙臂垂直角度控制,分别使用了不同的控制方法。
2 耙臂水下施工安全控制技术
本文提出耙臂水下施工安全控制技术从3 个方面展开:波浪补偿器位置控制、耙臂水平角度控制、耙臂垂直角度控制。
2.1 波浪补偿器位置控制
2.1.1控制原理
波浪补偿器用于维持耙头对海床的压力,控制钢丝绳张力在预设的范围内变化,防止钢缆自由松弛和再度张紧[5]。当船舶受波浪影响向上运动,或耙头沿海床向下运动时,要保持耙头在海床的位置不变,水面以下的钢丝绳变长,船上的钢丝绳变短,钢丝绳张力变大,油缸在钢丝绳张力的作用下被缩回;反之,当船舶受波浪影响向下运动,或耙头沿着海床被迫向上运动时,水面以下的钢丝绳变短,而船上的钢丝绳变长,钢丝绳张力变小,为维持钢丝绳的张力,油缸在油压的作用下伸出,钢丝绳张力抵消了耙头对海床压力加大的倾向[6]。
2.1.2控制方式波浪补偿器中间位置控制示意图见图3。
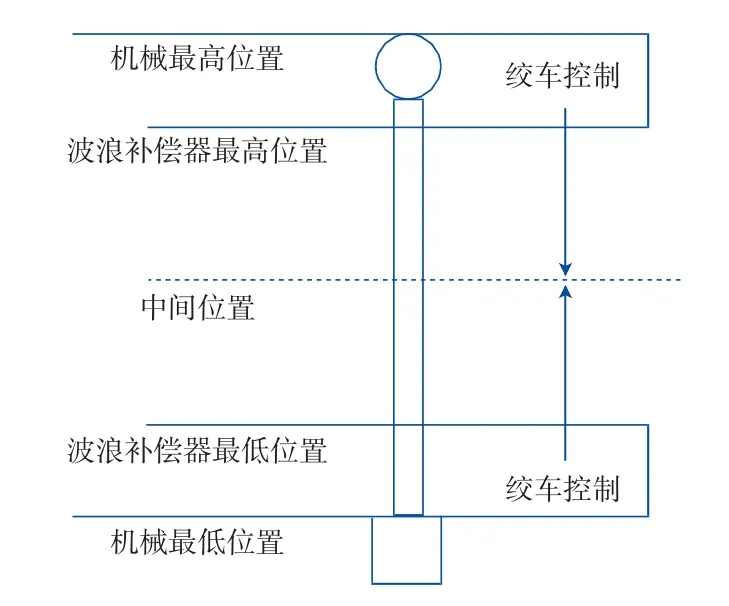
图3 波浪补偿器中间位置控制Fig.3 Middle position control of swell compensator
波浪补偿器中间位置控制,可通过监视并控制波浪补偿器保持在中间位置,该中间位置由波浪补偿器设置中的最高和最低位置计算得出。通过设定死区(0.05 m)将波浪补偿器控制在中间位置附近,可确保耙头在海底遇到深凹时能够紧贴泥面,保持生产效率,同时在遇到海底凸起处时,可将耙头钢丝绳收紧,避免耙头左右摆动,造成重大安全事故。
波浪补偿器的中间位置需根据工程情况恰当设置。例如,波浪补偿器的中间位置设定过于接近于机械上限位,那么当耙头遇到海底深凹时,波浪补偿器可能快速下降,引起振动。当发生这种情况时,自动控制器将检测到波浪补偿器行程的快速变化,自动控制器将硬锁波浪补偿器,快速提升耙头至安全深度,再下放耙头,待波浪补偿器设定压力大于油缸压力时,解锁波浪补偿器,继续按照控制器设置和控制逻辑进行动作。
2.2 耙臂水平角度控制
2.2.1控制原理
耙头横向控制确保耙头不超过预先设定的横向限制。当耙头横向位置有可能超过设定时,自动控制器锁定波浪补偿器,控制耙头绞车上升,将耙头拉离地面,回至限制设定范围内位置。
耙头横向控制通过调节钢丝绳角度,将耙头横向位置保持在横向角度最大限定值范围内。水平角度作为施工安全保护控制,横向水平角度基本设定值在-18°~+18°,详细情况见图4。

图4 耙臂水平角度控制Fig.4 Horizontal angle control of suction tube
2.2.2控制方式
当耙头边沿横向位置超过设定挖泥舷内钢丝绳角度最大限定值与横向控制死区时,自动控制器将动作,自动硬锁波浪补偿器,控制耙头绞车上升,直至耙头位置回到自然垂直状态。
自动控制器通过水平角度传感器实时检测耙头横向移动速度,当耙头横向移动速度大于设定值时,自动控制器将动作,自动锁定波浪补偿器,控制耙头绞车上升,直至耙头位置回到自然垂直状态。自动控制器根据不同的模式,选用耙头深度控制或波浪补偿器中间位置控制模式控制耙头绞车[7]。
2.3 耙臂垂直角度控制
2.3.1控制原理
耙臂垂直角度控制分为3 种控制方式:万向节角度控制、下耙臂角度控制、安全限制控制。
万向节角度控制和下耙臂角度控制使耙臂在挖泥过程中保持正确的姿态,在疏浚挖泥过程中可以选择其中一种自动控制模式。安全限制是防止万向节受损。耙头绞车和耙中绞车协同控制,实现耙臂平稳控制。
2.3.2控制方式
万向节角度控制模式下,当上耙臂与下耙臂垂直角度差大于万向节手动设定值和耙臂角度控制死区总和时,自动控制器将动作,控制耙中绞车上升,直到上耙臂与下耙臂垂直角度差小于万向节手动设定值。万向节角度根据疏浚施工深度不同,其设定值也可进行调整,控制过程中设定相应控制死区(0.1°)。此时耙头深度将发生改变,耙头绞车将根据自动控制功能动作。当下耙臂与上耙臂垂直角度差大于万向节手动设定值和耙臂角度控制死区总和时,自动控制器将动作,控制耙中绞车下降,直到下耙臂与上耙臂垂直角度差小于万向节手动设定值。此时耙头深度将发生改变,耙头绞车将根据自动控制功能动作。
下耙臂角度控制模式下,当下耙臂对地角度大于下耙臂手动设定值和下耙臂角度控制死区总和时,自动控制器将激活,控制耙中绞车下降,直到下耙臂对地角度小于下耙臂手动设定值。下耙臂角度根据疏浚施工深度不同,其设定值也可进行调整,控制过程中设定相应控制死区(0.1°)。此时耙头深度将发生改变,耙头绞车将根据自动控制功能动作。当下耙臂对地角度小于下耙臂角度手动设定值和下耙臂角度控制死区总和时,自动控制器将激活,控制耙中绞车上升,直到下耙臂对地角度大于下耙臂角度手动设定值。此时耙头深度将发生改变,耙头绞车将根据自动控制功能动作。
安全限制模式下,为保护耙臂的中间部分(万向节),控制器需对上耙臂、万向节和下耙臂进行安全角度限制,当上耙臂、中间管、下耙臂垂直角度超过限定范围时,自动控制器将动作,停止所有耙臂绞车自动动作并发出报警,所有耙臂绞车转为手动控制。
3 结语
本文从3 个方面展开耙臂水下施工安全控制技术研究,对耙臂水下施工工序进行分析,形成一套完整的耙臂水下施工控制技术,可实现耙臂水下施工安全保护及水下自动施工功能。波浪补偿器位置控制是为了将耙头更好地贴近泥面,保证施工过程质量;水平和垂直角度控制可将耙臂保持在设定范围内,保证施工安全。该技术已在“新海虎8 轮”、“新海虎4 轮”、“航浚4019 轮”、“航浚3011 轮”等耙吸挖泥船实船应用,应用效果显著,该技术能够高效、安全、稳定地保持耙臂在水下正常施工,技术相较于人工更灵敏、高效,未来可推广至新船建造及旧船改造。
