机载多载频频控阵非均匀距离模糊杂波抑制方法
2024-01-30王华柯全英汇廖桂生
刘 成, 王华柯,*, 全英汇, 廖桂生
(1. 西安电子科技大学电子工程学院, 陕西 西安 710071;2. 西安电子科技大学雷达信号处理国家重点实验室, 陕西 西安 710071)
0 引 言
机载雷达是雷达系统中的重要应用,往往处于下视工作,雷达平台的运动速度较快,这使得原本静止的地面物体有了较大的相对速度。不同方向上杂波的相对速度不同,微弱低速目标会被杂波淹没,导致雷达的检测性能大幅度下降[1]。空时自适应处理(space time adaptive processiong, STAP)是一种有效抑制机载雷达杂波的方法,通过空时二维响应,自适应地在空时二维平面上形成凹口来消除杂波[2-5]。当机载雷达阵列处于正侧视情况时,杂波分布与距离无关,不同距离处杂波分布相同, STAP可以起到很好的抑制效果。但是当机载雷达阵列处于非正侧视情况时,杂波的分布与距离有关,不同距离的杂波分布不同,杂波分布拓宽,导致STAP形成的凹口也会拓宽,使得慢速目标信号也会衰减,这对于慢速目标的检测是不利的。为了解决非正侧视雷达带来的杂波分布非均匀问题,一系列的杂波补偿方法已经被提出了,如多普勒频移补偿[6-7]、角度多普勒补偿(angle Doppler compensation, ADC)、自适应角度多普勒补偿[8-10](adaptive angle Doppler compensation, A2DC)、空时插值法等[11-12]。这些方法可以使不同距离的杂波分布对齐,以减小STAP形成的空时二维凹口[13]。
机载雷达运动速度往往比较快,因此目标的相对速度很大,为了避免速度模糊问题,机载雷达常用较高的脉冲重复频率,但是这会带来距离模糊的问题,不同模糊区域的杂波会相互叠加。然而,不同模糊区域的杂波对距离的依赖性是有差别的,通常近程杂波距离依赖性严重,远程杂波距离依赖性较弱,即近程杂波分布随距离变化较大,远程杂波分布随距离变化较小。前面提到的补偿方法,对近程杂波的分布有对齐作用,但是对于远程杂波,反而会使得分布更加扩散。而在距离模糊情况下,近程杂波与远程杂波是相互叠加在一起的,这使得传统的补偿方法失效。要想抑制距离模糊的杂波,必须将不同模糊区域的杂波分离。
为了解决上述距离模糊的杂波问题,一系列的新方法已被提出[14-21],但是这些方法都面临复杂度较高、难以实现的问题。近年来,空域、时域、频域和码元域等多维域分集技术被深入研究[22-25],其中,多载频频控阵新体制雷达只有一个发射阵元,但此发射阵元同时发送多组正交波形,并且相邻波形的载频不同[26]。文献[27]中,利用多载频频控阵在不同模糊区域的发射频率上的差距,在发射维进行了波束形成,保留了感兴趣的区域,其余区域受到自适应抑制。然而此方法同样也面临计算复杂度大的问题,不便于实时处理,并且要获得较好的分离效果,需要发射自由度远大于模糊区域数,这也会增加系统的复杂度。
本文同样也利用多载频频控阵回波的发射频率仅与距离有关的特点,分别对各个模糊区域距离进行补偿。补偿之后,每个模糊区域内各个距离环杂波的发射频率相同,但是不同模糊区域的发射频率不同,并且当前被补偿的模糊区域发射频率为0。然后,用阻塞矢量阻塞掉当前模糊区域的杂波数据,最后将每一个模糊区域阻塞后的结果联立成方程组,解出各个模糊区域杂波的空时二维数据,实现各个模糊区域杂波数据的完全分离。分离之后,就可以对近程杂波进行单独补偿,然后利用STAP抑制各个模糊区域的杂波。
本文提出的杂波分离方法可以实现不同模糊区域的完全分离,理论上会比以往提出的滤波分离等方法效果要好,在不满足发射自由度远大于模糊区域数甚至仅仅等于模糊区域数的条件下均可以实现彻底分离。最终分离杂波方程组的参数是由雷达系统参数决定的。提前计算好参数,在分离过程中可以避免求逆等高复杂度的运算,因此这种算法复杂度低,便于实时处理。
本文结构如下:第1节介绍了多载频频控阵的发射、接收信号模型以及杂波的回波模型,并分析了前视情况下杂波的分布特性。第2节介绍了主值距离补偿、阻塞矢量的构造,引出本文所提出的方法,并在最后说明了阻塞矩阵构造的条件。之后介绍了多普勒频移补偿方法以及多普勒三通道联合自适应处理(three-Doppler channel adaptive processing, 3DT)的使用,最后对算法进行了一点改进,分析了频偏的限制以及算法复杂度,并对所提出的方法进行了总结。第3节对所提到的方法进行仿真,并与传统相控阵及相控阵上的距离补偿方法进行了对比。第4节给出了结论。
1 信号模型
1.1 点目标回波模型
多载频频控阵基于单发多收体制,发射天线同时发送多路正交信号,且各个信号的载频是不同的。假设发射信号为M个发射信号的相互叠加,则发射信号可以表示为
(1)
式中:Tp为脉冲持续时间;fm为第m路发射信号的载频,满足
fm=f0+(m-1)Δf
(2)
式中:f0为第一个发射波形的载频;Δf为相邻发射波形间的频率增量。φm(t)为第m路发射波形的基带信号,发射波形之间相互正交,即有
(3)
式中:(·)*表示共轭。
接收阵列采用N个阵元组成的线性阵列,发射信号的第k个脉冲,从信号发射到信号被第n个接收阵元接收经过的延时为

(4)
式中:c表示光速,R0为点目标所在的距离,v0为点目标的速度,va为机载雷达运动的速度。在正前视情况下,可以认为雷达的偏航角为90°,则平台相对于点目标的运动速度可以表示为vasinθ0cosφ0。为了后续表示方便,这里记vs=vasinθ0cosφ0+v0,dR为接收阵元间距,Tr表示脉冲重复周期,θ0,φ0分别表示点目标所在的方位角和俯仰角。N和K分别表示接收阵元总数和相干脉冲数,则第n个接收阵元接收的第k路信号可以表示为

(5)
式中:τ0=R0/c。式(5)可以满足是因为τ0和τn,k之间的差值相对于基带信号而言非常小,可以忽略不计。阵元接收回波信号之后,进行下变频和匹配滤波,由于发射天线发射了M路正交信号,因此在接收端通过M个通道的匹配滤波,可以实现M路发射信号的分离。第m路通道的下变频和匹配滤波的函数可以综合表示为
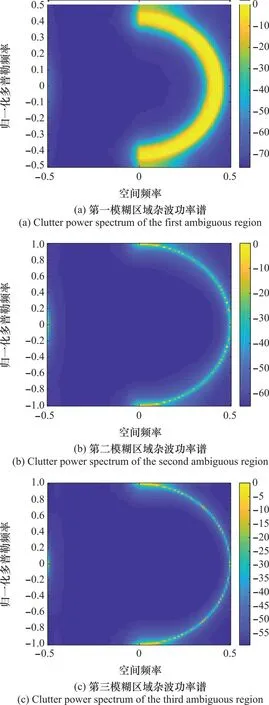
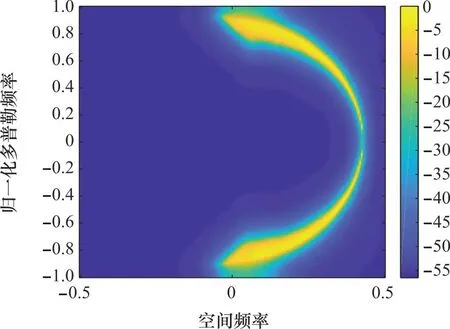
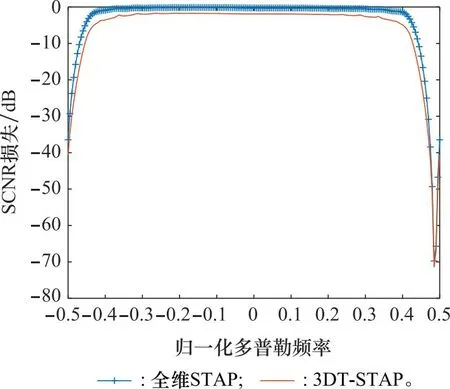
hm(t)=φm(t)ej2πfmt, 0 (6) 因此,第n个接收阵元接收的第k个脉冲信号,在经过第m个通道的匹配滤波之后,分离出来的信号可以表示为 (7) 式中:ε表示脉压之后的增益,为一个常数;λ0为载频为f0时所对应的波长,满足λ0=c/f0。将所有接收阵元的所有通道接收的所有脉冲回波进行排列,即可将接收信号表示为 ys=[r1,1,1,r1,1,2,…,r1,1,K,r1,2,1,…r1,N,K,…,rM,N,K]T=εaT(R0)⊗aR(θ)⊗at(v) (8) 式中:(·)T表示转置;⊗表示Kronecker积;aT(R0)、aR(θ0,φ0)、at(θ0,φ0,v)分别表示发射导向矢量、接收导向矢量、时间导向矢量,其具体表达式分别为 (9) (10) (11) 这里,aT(R0)∈CM×1,aR(θ0,φ0)∈CN×1,at(θ0,φ0,vs)∈CK×1。与导向矢量相对应,发射频率fT(R0)、接收频率fR(θ0,φ0)、归一化多普勒频率fd(θ0,φ0,vs)分别为 (12) (13) (14) 由式(12)可知,发射频率是直接和目标的距离有关的,这是后面解决距离模糊的关键。 机载雷达在正视且存在距离模糊情况下,面临的杂波如图1所示,每一个距离环的杂波可以由很多个杂波散射单元的回波叠加而成,而每一个杂波散射单元都可以视作一个点目标,所以根据式(8),第l个距离单元的杂波的回波模型可以表示为 (15) 式中:Nc表示一个距离环内的等效杂波源数;P表示距离模糊数;vc=vasinθicosφl,为雷达对于杂波散射单元的相对速度,这里的俯仰角φl=arcsin(H/Rl)和距离有关,接收频率和归一化多普勒频率都是因为和俯仰角相关,所以和距离相关。不同模糊距离的杂波在跨脉冲重复周期(pulse repetition period, PRT)之后会与当前距离环的杂波数据叠加在一起。Rp,l为杂波的实际距离,满足 Rp,l=(p-1)Ru+Rl (16) 式中:Ru为最大不模糊距离;Rl为主值距离。杂波的接收频率和归一化多普勒频率分别为 (17) (18) 图1 机载前视雷达杂波模型Fig.1 Clutter model of airborne forward-looking radar 杂波的方位角θ对应雷达在水平面上的扫描范围,通常为0°到180°,所以一般可以认为杂波θ是在0°到180°均匀分布的。根据式(17)和式(18)可知,接收频率和归一化多普勒频率在分布上满足 (19) 由式(19)可知,杂波在接收频率和归一化多普勒频率二维平面上呈椭圆分布,并且椭圆的轴是和距离有关的,因此在机载正视情况下杂波的空时二维分布具有距离依赖性。当杂波距离较远时,俯仰角随距离变化不明显,这时不同距离的杂波分布较为集中,杂波的距离依赖性较弱。但是当杂波距离较近时,俯仰角随距离变化较明显,此时不同距离单元的杂波会分布在不同尺寸的椭圆上,距离依赖性严重。 图2 不同距离杂波分布Fig.2 Distribution of clutter at different distance 图2(a)为第一模糊区域的杂波,分别位于8 km、12 km、16 km距离门处的杂波在接收频率和归一化多普勒频率二维平面上的分布。此时可以明显看到分布是分散的。由此可知,近程杂波的分布扩散非常严重。图2(b)为第2模糊区域的杂波在24 km、27 km、30 km(与第1模糊区域主值距离相同)处的杂波分布,可知此时不同距离处的杂波分布几乎一致,杂波分布的距离依赖性较弱。对于更远距离的第3、第4模糊区间,杂波分布的距离依赖性更弱,杂波分布更为集中。 本文假设一共有4个不模糊区域,杂波的发射频率为 (20) 可见fcT(Rp,l)除了与距离模糊区域数有关,还与主值距离有关。这里通过二次距离补偿来消除fcT(Rp,l)中的主值距离依赖项。通过构造主值距离补偿矩阵: bc1(Rl)=[1,e-j4πΔfRl/c,…,e-j4πΔfRl(M-1)/c] (21) Bc1(Rl)=diag(bc1)⊗1N⊗1K (22) 式中:diag(·)表示矢量的对角化,1N,1K分别表示维度为N和K的单位矩阵,补偿后的数据可以表示为 (23) (24) 图3为二次距离补偿前后的发射频率与主值距离的关系,可以看出,补偿前发射频率是和主值距离相关的,补偿之后,各个模糊区间的发射频率与主值距离无关,为一个常数,其值只与距离模糊数有关。 图3 发射频率与主值距离的关系Fig.3 Relationship between transmit frequency and principal range (25) (26) (27) 进行不同模糊区域杂波分离的目的是为了解出C1、C2、C3、C4。在经过主值距离补偿之后,除了每个模糊区域的发射频率都是常数,第一模糊区域的发射频率为0,则对应的发射导向矢量是一个全1的矢量,而其余模糊区域导向矢量不是全1矢量,即 (28) 根据第一模糊区域与其他模糊区域数据形式上的差距,这里构造第一模糊区域的阻塞矢量B1=[1,-1,0,…,0]∈C1×M,将此矩阵与补偿后的数据相乘,即是将数据矩阵里面的第一行与第二行数据相减,即 (29) 式中:am,p为第p个模糊区域对应的补偿后的发射导向矢量中的第m个值,满足: am,p=e-j4π(m-1)(p-1)RuΔf/c (30) 由上述分析可知,a1,1-a2,1=0,所以式(29)右侧实际上只有其余3个模糊区域杂波的数据,即通过阻塞矢量和补偿后的矩阵相乘,就可以得到第2、第3和第4模糊区域杂波数据的线性组合。 前面的二次距离补偿是对主值距离进行的补偿,补偿矩阵里面也只有主值距离,因此也可以称为第一模糊区域距离补偿。 目前已得到式(29)这1个方程,其中方程左边的B1以及yc1,l均是已知的,方程右边的系数也是已知的。但是要解出C1、C2、C3、C44个未知数,需要4个方程。得到式(29)的关键是经过第一模糊区域的距离补偿,因此同样的操作也可以用在其他模糊区域上。 构造第二模糊区域的距离补偿矩阵如下: bc2(Rl)=[1,e-j4πΔf(Rl+Ru)/c,…,e-j4πΔf(Rl+Ru)(M-1)/c] (31) Bc2(Rl)=diag(bc2)⊗1N⊗1K (32) 与前面第一模糊区域距离补偿之后一样,此时各个模糊区域的发射导向矢量为 (33) 第2模糊的发射频率是一个全1的矢量。与前面一样,对第2模糊区域补偿之后的数据重新排列成M×NK的矩阵,记为yc2,l,与式(27)相同,重排之后的数据可以写为 (34) 此时构造第二模糊区域的阻塞矢量B2=[0,0,1,-1,…,0]∈C1×M,是为了让矩阵里面第3行与第4行数据相减,则有 B2yc2,l=(a3,0-a4,0)C1+(a3,1-a4,1)C2+ (a3,2-a4,2)C3+(a3,3-a4,3)C4 (35) 式中:a3,1-a4,1=0,即式(35)的等式右侧变为第1、第3、第4模糊区域的数据的线性组合。式(35)中,am,p的计算方式仍为式(30)。虽然第二模糊区域的回波矩阵中的每一行的数据都是相同的,但是不和前面处理第一模糊区域数据一样用第1行数据减去第2行数据,具体的原因见后文。 由式(35)得到第2个方程,与前面两个模糊区域处理方法一致,分别构造第三模糊区域的距离补偿矩阵: Bc3(Rl)=diag([1,e-j4πΔf(Rl+2Ru)/c,…, e-j4πΔf(Rl+2Ru)(M-1)/c])⊗1N⊗1K (36) Bc4(Rl)=diag([1,e-j4πΔf(Rl+3Ru)/c,…, e-j4πΔf(Rl+3Ru)(M-1)/c])⊗1N⊗1K (37) 根据式(36)补偿后数据里第三模糊区域的杂波发射频率是全1的,根据式(37)补偿后第四模糊区域的杂波发射频率是全1的。再分别进行重新排列,将重新排列之后的数据分别记为yc3,l、yc4,l再分别构造阻塞矢量,分别为 B3=[0,0,0,0,1,-1,…,0]∈C1×M (38) B4=[0,0,0,0,0,0,1,-1,…,0]∈C1×M (39) 于是可以得到剩下的两个方程: B3yc3,l=(a5,-1-a6,-1)C1+(a5,.0-a6,0)C2+ (a5,1-a6,1)C3+(a5,2-a6,2)C4 (40) B4yc4,l=(a7,-2-a8,-2)C1+(a7,-1-a8,-1)C2+ (a7,0-a8,0)C3+(a7,1-a8,1)C4 (41) 注意式(40)和(41)中分别有a5,1-a6,1=0和a7,1-a8,1=0。那么联立式(29)、式(35)、式(40)和式(41)4个方程,就可以解出4个未知数C1,C2,C3,C4。具体可以表示为 (42) ×表示普通的矩阵乘法,记 (43) A∈CP×P,A的维度由距离模糊数决定,一共有P个模糊区域,则有P个方程联立成方程组。在P=4的情况下,方程组(42)有唯一解的条件是rank(A)=4,A中的元素是和各个模糊区域的阻塞矢量的选取有关的。通过仿真发现,在按照本文中的方法构造阻塞矢量时,矩阵A是满秩的,而如果全部通过第一行减第二行构造的阻塞矢量得到的矩阵A不是满秩的。关于阻塞矢量的形式与矩阵A的秩之间的关系还有待进一步探究,但是这种构造方式并不是唯一的。还是以4个模糊区域为例,每一个模糊区域的阻塞矢量都构造成重排后杂波回波矩阵相邻两行相减的形式,然后分别构造矩阵A。在发射端发射8组正交信号的情况下,一共有2 401种构造方法。通过仿真可以发现,这些组合里面,满足A是满秩的组合一共有1 976种。也就是说,当随便选取重排后的杂波回波矩阵中相邻两行相减,最后得到A是满秩,也就是方程组(42)有解的概率为82.3%,说明关于阻塞矢量的构造还是较容易的。当发射正交波形数刚好等于模糊区域数,即正交波形数为4时,仍然有42种组合方式。这些组合是可以事先确定的,实际使用时仅需从中任选一种即可。上述考虑的情况都是相邻两行相减,在不相邻情况下也可以相减,此时组合会更多。 由式(42)可以得到: (C1,C2,C3,C4)T=A-1(B1yc1,l,B2yc2,l,B3yc3,l,B4yc4,l)T (44) 式中:(·)-1表示求逆运算。注意,矩阵A是在雷达系统参数确定之后,可以提前计算出来的,那么A-1也是可以提前知道的,所以在实际运用过程中不需要进行求逆运算,只需要式(44)中的矩阵乘法,这将降低系统的复杂度,增强实时性。根据式(44)可以求出C1,C2,C3,C4对应4个模糊区域的杂波在接收频率和归一化多普勒频率上的数据,即空时二维数据,这与传统的机载相控阵雷达获得的数据维度是一致的。至此,不同模糊区域的数据就已经完全分离了。但是还需要注意,上述操作都是针对一个距离门的。要获得各模糊区域的杂波数据,需要对所有距离门执行上述操作。 经过第2.2节的步骤,可以使不同模糊区域的杂波数据分离。但是由图2可知,在分离出来的杂波中,近程杂波,即第一模糊区域的杂波的距离依赖性是十分严重的,而其余几个模糊区域的距离依赖性较弱。所以,需要对分离后的第一模糊区域的杂波进行补偿,使其空时二维分布更加集中。传统的补偿方法有多普勒频移补偿方法、自适应角度-多普勒补偿方法、空时插值方法等。虽然自适应角度-多普勒补偿法、空时插值法能够在空-时二维补偿杂波,获得更好的对齐效果,但是它们的计算复杂度太高,很难满足实时性要求,所以本文采用多普勒频移补偿方法。多普勒频移补偿法的具体原理可以参考文献[7]。 在补偿过程中,选取斜距为R0处的距离单元作为参考单元,则斜距为Rl处的距离单元对应的归一化频移补偿量为 (45) T=1N⊗diag(1,ejβ,ej2β,…,ej(K-1)β) (46) 则经过多普勒频移补偿之后的数据为 (47) 需要注意的是,由于只有第一模糊区域的杂波谱扩散严重,因此只有第一模糊区域需要补偿,其他模糊区域不需要补偿。 在上述对第一模糊区域的杂波数据进行补偿之后,就可以利用STAP来抑制杂波。全维的STAP虽然性能优越,但是维度太高,运算量非常大,不便于系统的实时处理,因此通常采用降维STAP来抑制杂波[28-30],3DT方法可以在保证STAP性能的前提下有效降低STAP的复杂度,因此本文采用3DT-STAP[31-34]方法,其具体原理可以参考文献[31]。 3DT的原理如图3所示,图4中DFT表示离散傅里叶变换。3DT通过目标所在的多普勒通道及其相邻的多普勒通道来代替全部的多普勒通道,从而降低系统自由度。 图4 3DT原理Fig.4 Principle of 3DT 在图4中取与第k个通道相邻的3个通道的时间导向矢量数据: H(k)=[at(k-1),at(k),at(k+1)]T (48) 然后构造3DT降维矩阵: T3DT=1N⊗H(k) (49) 则降维后的协方差矩阵和目标导向矢量分别为 (50) (51) 式中:Rc和S(fR0,fd0)分别表示全维的杂波协方差矩阵和目标导向矢量,分别满足: (52) S(fR0,fd0)=aR(θ0,φ0)⊗at(θ0,φ0,vs) (53) 式(52)中:L为估计协方差矩阵的训练样本数,可见降维前Rc∈CNK×NK,降维后R3DT∈C3N×3N。可见,在发射相干脉冲数较大时,协方差矩阵的维度已经大幅度下降。然后根据线性约束最小方差准则(linearly constrained minimum variance, LCMV)准则,可以计算出自适应权值: (54) 在文献[27]及文献[18]中,因为要考虑不同模糊区域的发射频率的值都对各发射信号载频间的步进量有严格的限制,但是在本文方法中,由于不同分离不同模糊区域的数据仅仅只用到当前补偿模糊区域的发射频率(为0),其余模糊区域的发射频率不为0,因此唯一的限制条件为 Δf(p-1)Ru/c≠nn=0,±1,±2,…p=-(P-2),…,0,2,…,P (55) 由于发射频率具有周期性,其周期为1,所以除了当前被补偿的模糊区域外,其余模糊区域的发射频率也不能为任意整数,并且对于p≠1的前提都需要满足。上述要求比较容易满足,因此后续可以考虑设置频移量大于信号带宽,让各发射信号之间在频域上分开,这样可以获得更好的正交性,也更利于工程上的实现。 本文所提方法先对各个模糊区域进行距离补偿,时间复杂度为O{(MNK)2PL}。虽然只对发射频率进行补偿,但是在构造阻塞矩阵时,还是将矩阵构造为MNK×MNK维。在补偿完之后,需要对回波数据矩阵重排,因此,这里可以先对矩阵重排,再进行补偿,此时时间复杂度降为O{M2NKPL}。各个模糊区域与阻塞矢量相乘的复杂度为O{MNKL},但是在实际应用时,这一步只需要将阻塞矢量对应的回波数据中的两行相减即可,因此实际复杂度为O{NKL}。最后,联立阻塞结果,解出各个模糊区域杂波的复杂度为O{P2NKL}。至此各个模糊区域的杂波数据已经全部分离,相比文献[23]中的方法,本文提出的方法在杂波分离时间复杂度上更低。后续的多普勒频移补偿的复杂度为O{(NK)2PL},3DT-STAP的复杂度为O{(3N)2PL+(3N)3P}。当然,这是对所有模糊区域进行抑制,如果只对感兴趣区域的杂波进行抑制,时间复杂度会更低。 本文所提方法可以总结为如下几个步骤: 步骤 1对一个距离门的回波数据重新排列,分别进行各个模糊区域的距离补偿,再乘以各个模糊区域的阻塞矢量。联立乘以阻塞矢量后的结果,解出当前距离门各个模糊区域的杂波数据。 步骤 2对每一个距离门重复步骤1的操作,最终可以得到各个模糊区域的全部数据。然后,对第一模糊区域的数据单独进行多普勒频移补偿。对补偿完之后的数据以及其他模糊区域的数据采用3DT降维STAP计算出权系数。对相应通道的脉冲加权求和,从而抑制杂波。 仿真实验参数设置如表1所示。 表1 仿真基本参数 这里假设机载雷达的探测距离为60 km,最大不模糊距离可以根据PRT计算出,为15 km,所以一共有4个模糊区域。如表1所示,第一模糊区域的最大俯仰角为41.81°,最小俯仰角为23.58°,而第二模糊区域最大俯仰角为14.48°,最小俯仰角为11.54°。可见第二模糊区域的距离单元间俯仰角的变化是非常小的,而第一模糊区域的变化比较大。第三、第四模糊区域俯仰角的变化则更小。 按照本文第2.2节的方法,对杂波数据进行分离,分离后的数据采用Capon谱来确定杂波在空时二维上的功率谱分布,Capon谱根据下式来绘制: (56) 式中:S(fR,fd)表示空时二维上的联合导向矢量。4个模糊区域按照式(56)得到的功率谱如图5所示。 图5 杂波分离后的功率谱Fig.5 Power spectrum after clutter separation 由图5可知,第一模糊区域的杂波的分布较为分散,距离依赖性严重,而其余几个模糊区域的杂波分布较为集中,距离依赖性弱。按照本文第2.3节中提到的多普勒频移进行补偿后,功率谱如图6所示。可见,多普勒频移补偿方法可以使得主瓣杂波中心频率对齐,但是旁瓣区域杂波频率并不能完全对齐。但是,通常旁瓣杂波相较于主瓣杂波的影响更小。 图6 多普勒频移补偿后的第一模糊区域杂波功率谱Fig.6 Clutter power spectrum of the first ambiguous region after Doppler shift compensation 信杂噪比(signal clutter noise ratio, SCNR)损失曲线是常用的衡量杂波抑制性能的指标。SCNR损失定义为 (57) (58) 参数中选取的脉冲重复频率为10 kHz,则归一化多普勒频率对应的实际多普勒频率的范围为-5~5 kHz,测速范围为-150~150 m/s。不考虑负速度的情况下,最大可测量速度为300 m/s。图7分别显示了第一模糊区域杂波分离后进行多普勒频移补偿前后,以及3DT降维前后的SCNR损失曲线。从图7中可以看出,如果对分离后的第一模糊区域的杂波直接进行STAP,则会形成很宽的凹口,这对于目标的检测是非常不利的。使用3DT后,相比于全维情况下,SCNR存在一定的损失。 图7 第一模糊区域STAP后SCNR损失曲线Fig.7 SCNR loss curve of the first ambiguous region after STAP 图8所示为分离后的远程杂波直接进行全维STAP和3DT-STAP后的SCNR损失曲线,这里以第二模糊区域为例,可以看出相对于远程杂波,直接用STAP时已经可以很好地在主瓣杂波处形成较窄的凹口,使用3DT依然会带来一定的SCNR损失。第三、第四模糊区域也类似。 图8 第二模糊区域STAP后SCNR损失曲线Fig.8 SCNR loss curve of the second ambiguous region after STAP 将本文所提方法和传统相控阵处理的SCNR损失曲线进行对比,结果如图9所示。可以看出,相控阵对不同模糊区域的杂波数据没有区分的能力,因此无法对近程杂波单独进行距离补偿,而远程杂波在进行距离补偿之后,反而会使得杂波功率谱扩散,导致凹口不会收缩。相控阵补偿前和补偿后的杂波功率谱分布如图10所示,其分布与分析一致。 图9 本文方法与传统相控阵的SCNR损失曲线对比Fig.9 Comparison of SCNR loss curve between the proposed method and traditional phased array 图10 相控阵杂波功率谱分布Fig.10 Power spectrum distribution of clutter of phased array 本文通过对多载频频控阵回波信号的分析,利用回波的依赖性和二次距离补偿,巧妙地构造出一组包含各模糊区域杂波的方程,以较低的复杂度实现了各个模糊区域杂波的完全分离。分离杂波后,对近程杂波单独进行多普勒频移补偿,远程杂波不做处理,实现近程杂波的对齐,最后通过3DT-STAP实现各个模糊区域杂波的抑制。通过仿真,证明本文提出的方法对距离模糊杂波具有良好的杂波抑制能力。此外,本文所提方法受发射频差限制较小,具有较好的应用前景。1.2 杂波回波模型



2 杂波分离
2.1 主值距离补偿


2.2 模糊区域杂波分离





2.3 多普勒频移补偿

2.4 降维STAP

2.5 频移分析
2.6 算法复杂度分析
3 仿真实验





4 结束语
