基于增益控制的永磁同步电机低速转子位置估算方法
2024-01-26李文真许宇豪
李文真,许宇豪
(1.西安航空学院 车辆工程学院,西安 710077; 2.西安航空学院 电子工程学院 西安 710077)
0 引 言
永磁同步电机(以下简称PMSM)因其功率密度高,已广泛应用于电动汽车、轨道交通、家用电器等领域[1]。通常转子位置和速度信息由安装在电机轴上的机械位置传感器获得。位置传感器会增加电机控制系统的成本和体积,同时降低电机系统在恶劣条件下的整体运行可靠性。因此,PMSM的无传感器控制在工业应用中受到了广泛的关注。PMSM的无传感器控制方法根据电机的运行速度可分为基于模型的方法和基于凸极检测的方法两类。基于电机模型的方法是通过观测电机的反电动势来获取转子位置信息,这种方法一般用于电机运行的中高速范围[2]。
当电机运行在低速甚至零速时,反电动势幅值较小甚至为零,滑模观测器会因为信噪比过低而失效。在低速时使用的位置观测方法是基于凸极信号追踪的高频注入法。高频脉振方波注入法的注入信号频率高,扩大了电流环和转速环的带宽,但由于方波中包含谐波分量,一些非理想因素例如系统延迟等会作用于感应电流的谐波分量中。目前,考虑系统延迟下提升高频脉振方波注入法的观测稳定性和位置估计精度的方法较少。文献[3]提出了一种基于扩展状态观测器和非线性误差反馈控制器的自抗扰控制策略,对高频脉振方波注入法中位置跟踪器的总扰动进行了估计和补偿。自抗扰控制器虽然可以降低位置跟踪器的总扰动,但非线性控制方法增加了系统的复杂度。从已经估计到的物理量中重构出转子位置需要位置跟踪器。而物理量包含反电动势、磁链以及从感应电流中解调出的位置估计误差。在全阶观测器中,如果状态变量中包含转子位置和转速,则不需要增加位置跟踪器。基于典型二阶锁相环的位置跟踪器[4]是最常用的,但在典型锁相环的参数设计中假定速度和转矩恒定,容易带来速度瞬态过程中的速度误差。文献[5]将一个由转矩误差驱动的PI调节器增加到基于锁相环的速度估计中,以降低速度估计误差。文献[6]用跟踪时变速度的高阶位置跟踪器代替二阶锁相环。文献[7]设计了三阶锁相环用于跟踪给定的斜坡速度信号。以上方法都可以提高速度变化时锁相环的动态性能。文献[8]也构造了由电流估计误差产生的与速度相关的自适应率,并用于调整磁链或反电动势估计值,目的也是提高位置跟踪器对转速估计误差的鲁棒性。
根据以上分析,学者们针对不同的位置观测方法进行了固有缺陷的优化及参数调优,提高了位置观测方法的可用性。但是,位置观测方法中仍存在一些待优化的问题。高频脉振方波注入法虽然提高了注入频率和矢量控制系统的闭环带宽,但由于脉振方波信号被注入在旋转坐标系,仍会带来收敛时间长的问题;同时,解调过程中使用的电流微分对采样精度要求很高,采样点误差会改变系统的动态特性甚至导致系统失稳。针对零低速域的高频脉振方波电压注入法在系统延迟影响下的稳定性和动态性能下降问题,本文提出了位置跟踪器的增益控制策略,通过控制开环增益控制了系统的动态特性,实验结果表明,本方法具有良好的稳定性,且收敛速度快。
1 高频脉振方波注入的传统差分解调法
在估计的d轴注入幅值为Vh、周期为th的方波电压,当忽略定子电阻和电动机转速时,可得定子绕组在估计dq轴上的高频电流响应[9]:
(1)

(2)
由式(1)可知,估计的dq轴电流中同时包含了转子位置误差和高频三角波,如需得到转子位置误差必须消除三角波电流的影响。由于三角载波的周期等于注入方波的周期,且在整个周期内三角载波的斜率绝对值固定,每半个周期斜率正负变化一次,因此,当采样周期ts为注入方波周期th的一半时,传统方法通过差分电流乘以一个单位方波来消除三角载波的影响,以下简称差分解调法。
根据式(1)可以推出估计的dq轴的差分电流:
(3)
对差分电流进行如下运算:
(4)
由于涉及到电流差分运算,差分电流表达式中包含一个差分周期即采样周期ts。根据式(4)可得位置估计误差函数:
(5)

由式(5)可知,传统差分解调法得到的理想位置误差系数k1与注入幅值、采样周期和定子电感有关。
2 系统延迟下开环增益的计算方法
在基于高频注入法的无位置传感器位置估算系统中,由电流传感器、IGBT和A/D转换器的响应时间以及算法的计算执行时间组成的系统延迟时间td与注入的高频信号周期是同一数量级的,td会直接影响位置估算系统的精度和稳定性[10]。相对于滤波延迟对解调输出的影响,在脉振方波注入法的单采样更新模式下注入频率可达PWM开关频率的一半。由于注入频率远高于基波运行频率,在信号处理中可以省去低通滤波环节,即使存在滤波环节,也可以将截止频率设得很高,忽略低通滤波器带来的相移。
由于传统方法未考虑系统延迟时间,故式(5)中k1的表达式中不包含td,在系统延迟影响下,开环增益值不再是理论值k1,而是一个变化值。如果仍然使用k1作为位置跟踪器的开环增益,估算系统的性能和稳定性会降低。本节提出一种新型开环增益计算法,在考虑td的前提下重新推导了开环增益的表达式。首先,根据采样延迟时间与采样周期的关系,分别计算采样时的延迟时间相对于电流峰值相差0~0.5ts、0.5ts~ts、ts-1.5ts、1.5ts~2ts时,采样时所对应的电流绝对值;其次,利用采样时所对应的电流绝对值,计算位置估计误差函数中的误差系数k2;最后,将误差系数k2代入误差估计函数中,实现采样周期为高频脉振方波电压周期一半且采样时的采样点不为电流峰值时的转子位置估计。该方法能够实现采样周期为高频脉振方波电压周期一半且采样时的采样点不为电流峰值时的转子位置估计。结合位置跟踪器的结构原理、稳定性判据和伯德图,可分析不同开环增益对系统性能的影响。

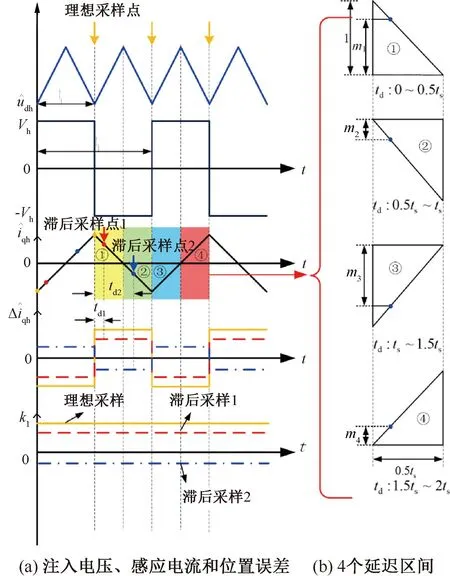
图1 采样点滞后对感应电流及误差函数的影响
由图1(a)可知,在滞后采样点1得到的k1相比于理想采样点变小;在滞后采样点2得到的k1相比于理想采样点处的绝对值变小,符号变负。
除了图1(a)的两个特殊采样点以外,列举了延迟时间在一个注入方波周期(两个采样周期)内的实际位置估计误差的变化规律,实际估计误差和误差系数分别设为ε2和k2。延迟时间分为td∈0~0.5ts;td∈0.5ts~ts;td∈ts~1.5ts;td∈1.5ts~2ts4个区域,如图1(b)所示。
用几何法可算出4个区域内的误差系数k2,计算方法如下。令4个区间内所有三角形的底边为0.5ts,临边为1,根据相似三角形定理,可以得出图1(b)中4个变量的值:
(6)
根据图1的对照关系,可得:
(7)
由图1(a)可得第②区域和第③区域内ε2的符号为负。同时,由式(5)和式(6)可得出图1(b)的4个区域内|ε2|的变化规律,进一步推导出由差分解调法得到的实际位置误差函数ε2和误差系数k2:
ε2≈k2Δθ
(8)
(9)
式中:n为正整数;%表式求余。
由式(9)可知,k2的值是周期变化的。为了验证k2的变化规律,使用MATLAB的plot函数绘制了k2在td∈[0~4ts]的值,如图2所示。此时ts=0.001 s,注入方波周期为2 ms。
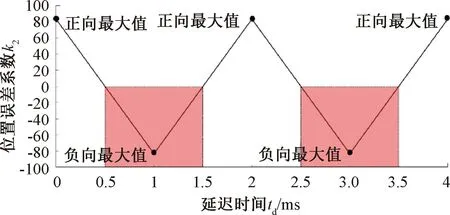
图2 差分解调法在不同延迟时间下的误差系数
图2证明了位置误差系数k2的大小及符号会随着延迟时间的变化而变化。具体而言,当存在系统延迟时,ε2虽然是Δθ的函数,但其系数k2不再是一个固定值,其大小和符号都与td值有关;k2是td的周期函数,周期为2 ms,其大小等于注入方波周期;当td∈(0.25th+nth,0.75th+nth)时,k2<0,如图2中阴影部分所示;当td=0.5th+nth时,k2取得负向最大值,当td=nth时,k2取得正向最大值。可以看出,理想参数k1是恒定不变的,而系统延迟下的实际参数k2是变化的。
3 开环增益对系统的影响
本文提出了位置跟踪器的增益控制策略,通过控制开环增益提高了响应特性。本节通过稳定性判据和波特图分析开环增益对系统的影响。首先,开环增益的符号会影响系统的参数稳定域,稳定性是系统性能好坏的重要指标。根据劳斯判据可得k2在不同符号下PI参数对位置跟踪器的稳定性影响。
列劳斯表:
由劳斯判据可得系统的参数稳定域,如图3所示。当PI参数选取在图中稳定域中时系统稳定,否则系统不稳定。当进行位置估算时,PI参数通常是预先设置的,且在整个位置估计完成之前不会改变。因此,如果实际的位置估计误差增益与理想的增益符号相反,会使原先设计的PI参数不符合系统稳定条件,进而造成估计位置发散,系统失稳。

图3 系统的参数稳定域
其次,相同符号下k2的大小会影响闭环系统的带宽频率。使用MATLAB的Bode函数绘制了不同k2下位置跟踪器,即二阶锁相环的幅频特性曲线,如图4所示。其中,PI参数kp设为50,ki设为25。由图4可知,位置跟踪器的带宽在k2=8.8时为69.7 Hz,在k2=4.4时为34.9 Hz,在k2=2.2时为17.5 Hz。因此,位置跟踪器的带宽随k2的增大而增大。综上所述,当存在系统延迟时间td时,传统差分解调法中的误差系数k2会出现幅值下降甚至变号的情况,如果仍然实用误差系数k1会导致位置跟踪器的开环增益会发生变化,进而影响系统的稳定性和带宽。开环增益的幅值影响系统的闭环带宽,开环增益的符号影响系统的稳定性,会使系统从负反馈变为正反馈,从而使估计位置发散。

图4 位置跟踪器的闭环伯德图
因此,本方法使用误差系数标幺法,利用式(9)计算出k2之后,将k2代入误差函数,得到新的误差函数:
(10)
由式(10)可知,标幺后的开环增益为1。开环增益固定时,系统拥有固定的带宽,避免了增益下降或变号造成的系统性能下降。
图5是本方法的实现原理框图。

图5 本方法的基本原理框图
4 实验验证
利用图6的实验平台对本方法进行实验验证。实验装置由一个由两电平功率逆变器驱动的15 kW PMSM组成。采用三菱智能功率模块PM100RLA120驱动PMSM,控制板的核心选取DSP TMS320F28335,利用旋转变压器测量实际转子位置,便于与本方法得到的估计位置比较。选用霍尔电流传感器HNC-100LT检测三相电流,通过USB-RS485通信接口采集实验数据并传输到上位机,直流母线电压为310 V。实验用 PMSM与另一个PMSM对拖产生负载转矩,利用电阻箱与对拖电机的定子绕组连接从而在电机运行时产生与转速成正比的线性负载转矩。PMSM的参数如表1所示。逆变桥的开关频率为7.5 kHz,注入方波频率为3.75 kHz,注入方波电压幅值为20 V。
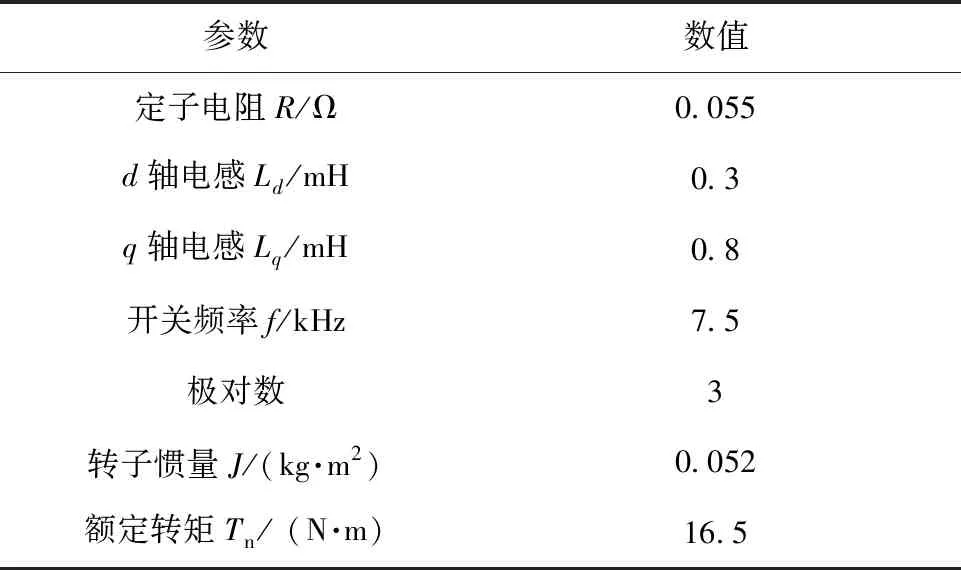
表1 PMSM关键参数

图6 PMSM控制系统实验平台
实验分为两个步骤。1)静止状态下,对电机某初始位置使用本方法进行初始位置检测,并与传统差分解调法比较初始位置检测的动稳态特性;2)低速稳定运行时,通过改变延迟时间td,比较差分解调法和本解调方法的动稳态特性。
图7是电机静止在30°电角度时,使用差分解调法和本方法分别进行初始位置检测的实验波形。系统延迟时间td=0.33 ms。所有方法中位置跟踪器的带宽均设计为57.8 Hz,由于不同方法得到开环增益的理论值不同,相同带宽下设计的PI参数也不同:差分解调法中位置跟踪器的PI参数kp=45,ki=5 639;本方法中kp=250,ki=31 300。
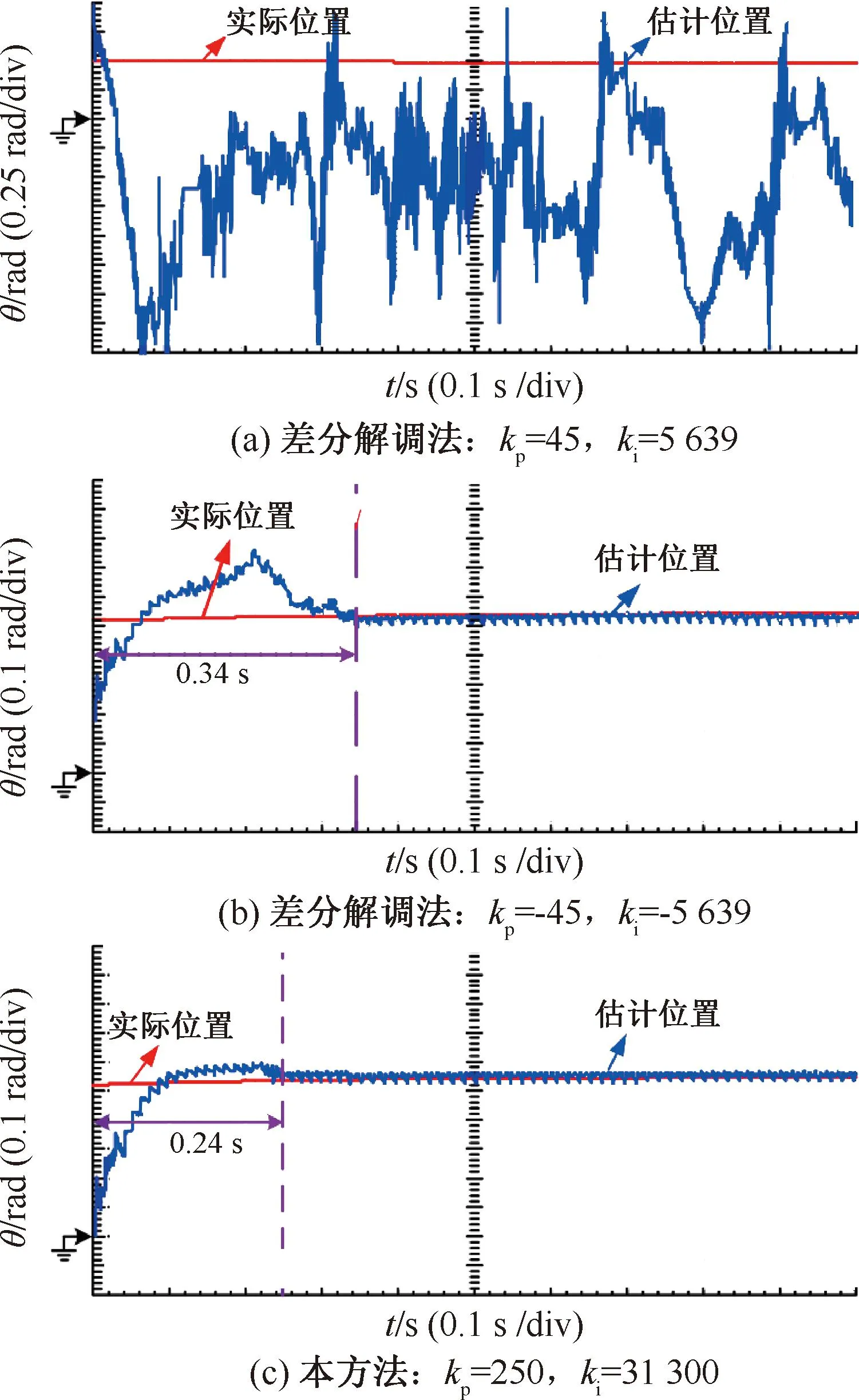
图7 初始位置检测实验结果
由图7(a)可知,差分解调法得到的估计位置发散,这是由于此时差分解调法中开关增益变号。将差分解调法中预设的kp、ki变负后估计位置即可收敛,如图7(b)所示,收敛时间为0.34 s。由图7(c)可见,本方法在同样的延迟时间下可以稳定收敛,而无需调整PI参数的符号,收敛时间为0.24 s,小于图7(b)的收敛时间。并且图7(b)的超调量明显大于图7(c),这是由于传统差分解调法的理论增益为k1,但延迟效应导致开环增益k1的绝对值变小,符号变负,尽管在图7(b)中已经调整了PI参数的符号以适应k1符号的变化,但由于k1的绝对值变小,实际位置跟踪器的带宽降低,系统衰减变慢,超调增大。本方法在稳态时能够获得固定的带宽,收敛性较好。
图8是电机以55 r/min旋转时使用传统差分解调法中的估计位置进行位置反馈的实验波形。从上到下为A相电流、估计和实际位置、估计误差。传统差分解调法中位置跟踪器的PI参数kp=45,ki=5 639,并在实验中保持不变,只改变系统延迟时间td。

图8 差分解调法在低速时的位置估计实验结果
图8(a)中td的起始值为0.20 ms。t1时刻,td增加了一个采样周期变为0.33 ms,系统变为不稳定状态。图8(b)中td的起始值为0.20 ms。t2时刻,td增加了两个采样周期变为0.46 ms,系统可以稳定收敛。这表明传统方法的收敛性受td影响,当td处于不稳定区域时,开环增益变负,估计位置发散。根据图8(b),当td变化时,系统虽然可以稳定收敛,但位置估计误差的波动范围变大了,这是由于差分解调法中开环增益受td影响。虽然td的变化没有造成开环增益变号,但影响了开环增益的绝对值,导致位置误差波动范围增大。
图9是电机以55 r/min旋转时使用本方法的估计位置进行位置反馈的实验结果。位置跟踪器中PI参数kp=250,ki=31 300,且在运行时保持不变。系统延迟时间td的起始值为0.20 ms,t3时刻,td变为0.33 ms,t4时刻,td变为0.46 ms。在td变化过程中估计位置仍可以稳定收敛,位置估计误差在0附近波动,波动范围为±6.8°。

图9 本解调方法在电机低速稳定运行时的位置估计实验结果
图9的实验结果表明,本方法的收敛性不受td影响,td变化时估计位置仍可以稳定收敛,且具有较高的位置估计精度。
5 结 语
本文针对零低速域的高频脉振方波电压注入法在系统延迟影响下的稳定性和动态性能下降问题,提出了位置跟踪器的增益控制策略。首先,建立了脉振方波注入法中系统延迟与高频感应电流、位置误差系数和位置跟踪器开环增益之间的联系,通过控制误差系数控制了位置跟踪器的开环增益;其次,在保留了脉振方波注入法高注入频率优点的前提下,得到了位置跟踪器的恒正增益,并据此进行了跟踪器的参数整定,实现了系统带宽和稳动态性能的双重提升。相比于传统的差分解调法,本方法避免了因系统延迟时间导致的开环增益降低或变号,提高了系统的动态特性和稳定性。
