单极静电电动机的力矩输出特性
2024-01-26王福谦
王福谦
(西南交通大学 希望学院 基础部,成都 610400)
0 引 言
静电电动机有多种类型,其中较为简单的模型是单极静电电动机,它由定子和转子组成,如图1所示。文献[1-2]给出单极静电电动机转子受到的静电力矩:
(1)
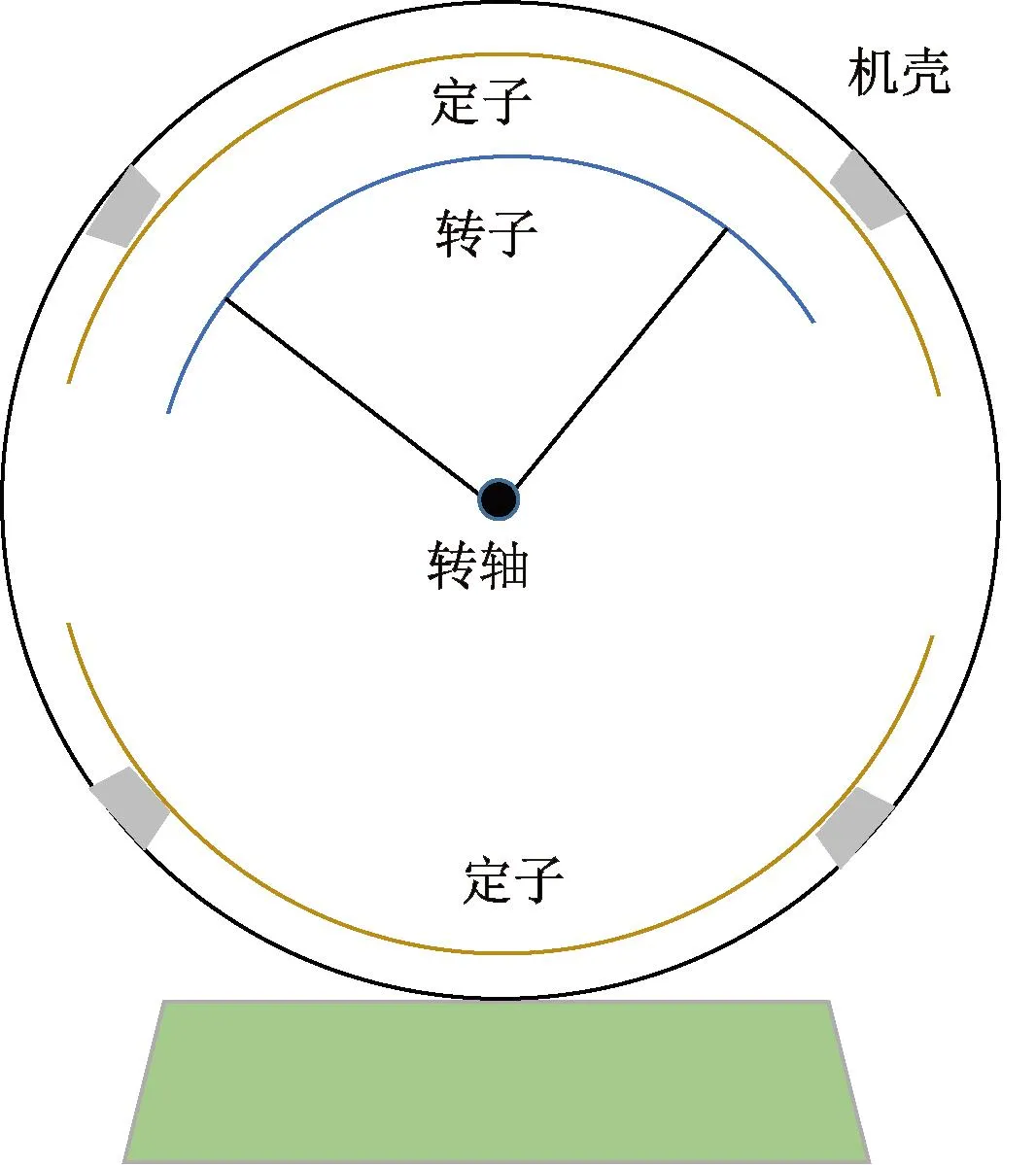
图1 单极静电电动机的结构示意图
式中:Cmax是转子与定子间最大电容;Cmin是转子与定子间最小电容;U0为电动机所加的直流电压;θ为电动机自平衡位置转过的角度。在电容式静电电动机中(Cmax-Cmin)是一个决定着电动机输出性能的重要参数,这个参数愈大,扭力矩与功率也愈大。在设计电动机时,主要的目标是获得最大可能电容的变化。但关于单极静电电动机的参数(Cmax-Cmin)的计算,相关文献还未见涉及。为此,本文拟将理论分析与计算机数值模拟相结合,利用保角变换法、格林函数法和软件MATLAB,讨论定子和转子间的静态电场分布,给出定子和转子所形成电容的电容量随角位移变化关系式,得到转子从平衡位置转过90°过程中电容的最大值和最小值,确定单极静电电动机的力矩,并给出优化静电电动机力矩输出特性的途径。
1 单极静电电动机定子和转子间的电场
下面根据图1的单极静电电动机结构,建立如图2所示的坐标系,来研究该结构的电场。图2中,内、外圆柱面的半径分别为R1、R2,其所对应的圆心角分别为θ1和θ2,电势分别为-U0和U0,内极板相对于初始位置(上极板关于y轴对称的位置)逆时针转过θ角度。当两圆柱面的长度远大于其宽度时,该结构可视为无限长,因而在垂直于圆柱面轴线的所有截面中的电势和场强的分布都相同,则其内部的电场为平行平面场,取其中一个截面为z平面。
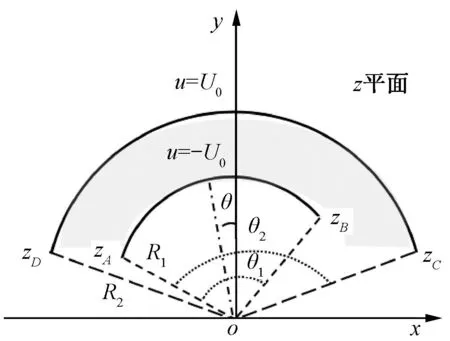
图2 单极静电电动机上半部分的横截面
为了求得单极静电电动机定子和转子间的电场分布,首先作如下的保角变换:
w1=iln(z)
(1)
变换式(1),将z平面上半径分别为R1和R1的圆弧,变换为w1平面上两平行线段AB和CD,AB和CD的间距h=ln(R2/R1),如图3所示。w1平面上两线段的起点和终点位置,由该传感器的横截面在z平面上的圆弧位置zA、zB、zC、zD,通过变换式(1)来确定,其位置分别为w1A、w1B、w1C和w1D,这8个点的位置及其关系由以下两式给出:
(2)
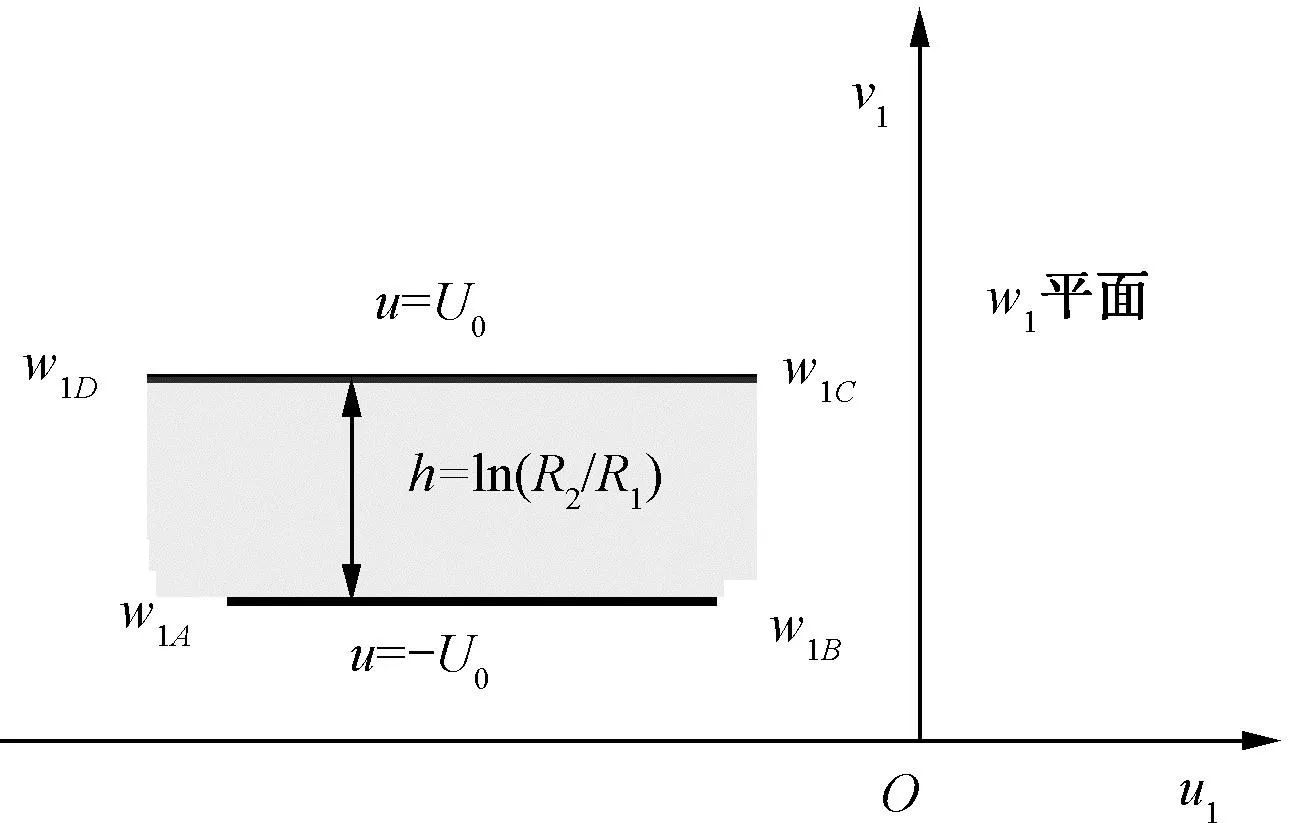
图3 保角变换后的带形区域
(3)
再作如下的平移变换:
w2=w1-iv1A
(4)
式中:v1A=Imw1A=lnR1。变换后的单极静电电动机定子和转子的横截面如图4所示。
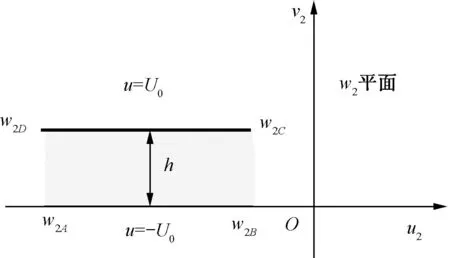
图4 平移变换后的带形区域
为了应用格林函数法求得单极静电电动机定子和转子间的电势分布,需再作如下的保角变换[3]:
(5)
变换式(5),将w2平面上半平面的平行于实轴且与实轴间距为h的两线段,映射为位于ζ平面实轴上的两线段,其带形域则映射为上半平面,如图5所示。
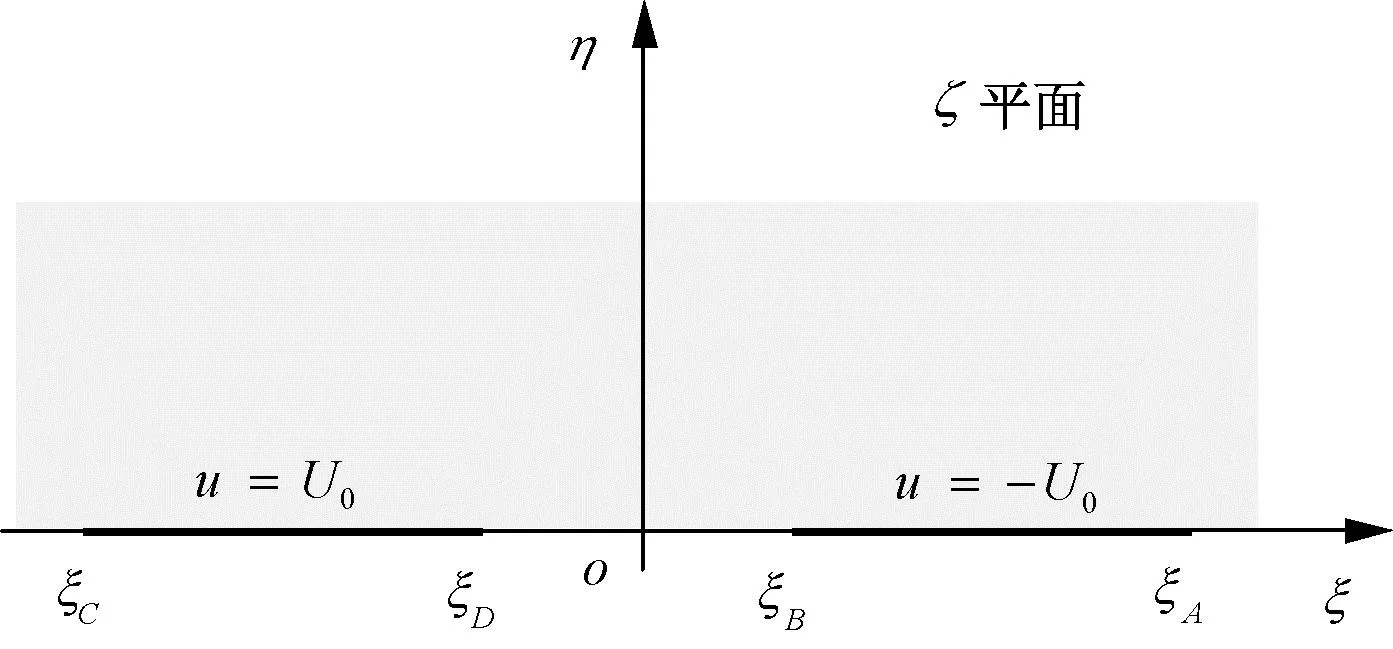
图5 再次保角变换后的上半平面
变换式(1)、式(4)及式(5)后,z平面上单极静电电动机定子和转子间的电势分布,就变换为ζ平面上的上半平面的如下边值问题:
(6)
对于ζ平面上图5的边值问题,应用格林函数法[4-5],可得其电势分布:

(7)
将式(1)代入式(5),有:


(8)
将式(2)代入式(8),得:
(9)
将式(8)中的ξ、η及式(9)代入式(7),得到:

(10)
式(10)即为单极静电电动机定子和转子间的电势分布函数。
式(10)的极坐标形式:
(11)

由场强与电势的微分关系E=-▽u,利用式(11)可得单极静电电动机定子和转子间的场强分布函数:

(12)
在MATLAB中,对单极静电电动机定子和转子间电场分布进行数值模拟[6],其电场线和等势线的分布如图6所示。
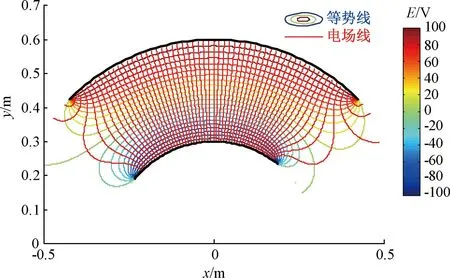
(a)U0=100 V,R1=0.3 m,R2=0.6 m,θ1=π/2,θ2=π/2,θ=π/30
由图6可以看出,单极静电电动机定子和转子间的电场线与等势线及导体边界均垂直,场线分布正确,为预期结果,验证了本文结论的正确性。
2 单极静电电动机定子和转子间电容的计算
为计算简便,可假设单极静电电动机定子和转子间的电压为U0(外极板的电势为U0,内极板的电势为0),取式(12)中的ρ=R1,可得其内极板上的电荷面密度:
(13)
单极静电电动机定子(转子)的带电量:
(14)
由式(14)得单极静电电动机定子和转子间的电容量:

(15)
式(15)即为单极静电电动机定子和转子间的电容量随转子转过角度变化的函数关系。
3 单极静电电动机力矩的确定
首先,利用MATLAB软件对式(15)编程,绘制出单极静电电动机转子在0~π/2转角内的C(θ)曲线,如图7所示。由图7可看出,C在0~π/2变化的趋势和Cmax和Cmin的大致数值。再由MATLAB的输出数据,可得到该电动机定子和转子间Cmax和Cmin的精确值,最后通过式(1)给出该电动机的力矩。例如,对于转子半径为0.06 m、定子半径为0.07 m的单极静电电动机,在其长度均为0.6 m时,由式(15)通过MATLAB编程可计算出Cmax和Cmin的值分别为5.345 616 652 072 09×10-12F和9.675 223 885 302 79×10-26F,在给定电动机所加电压U0后,由式(1)即可确定静电电动机的力矩。
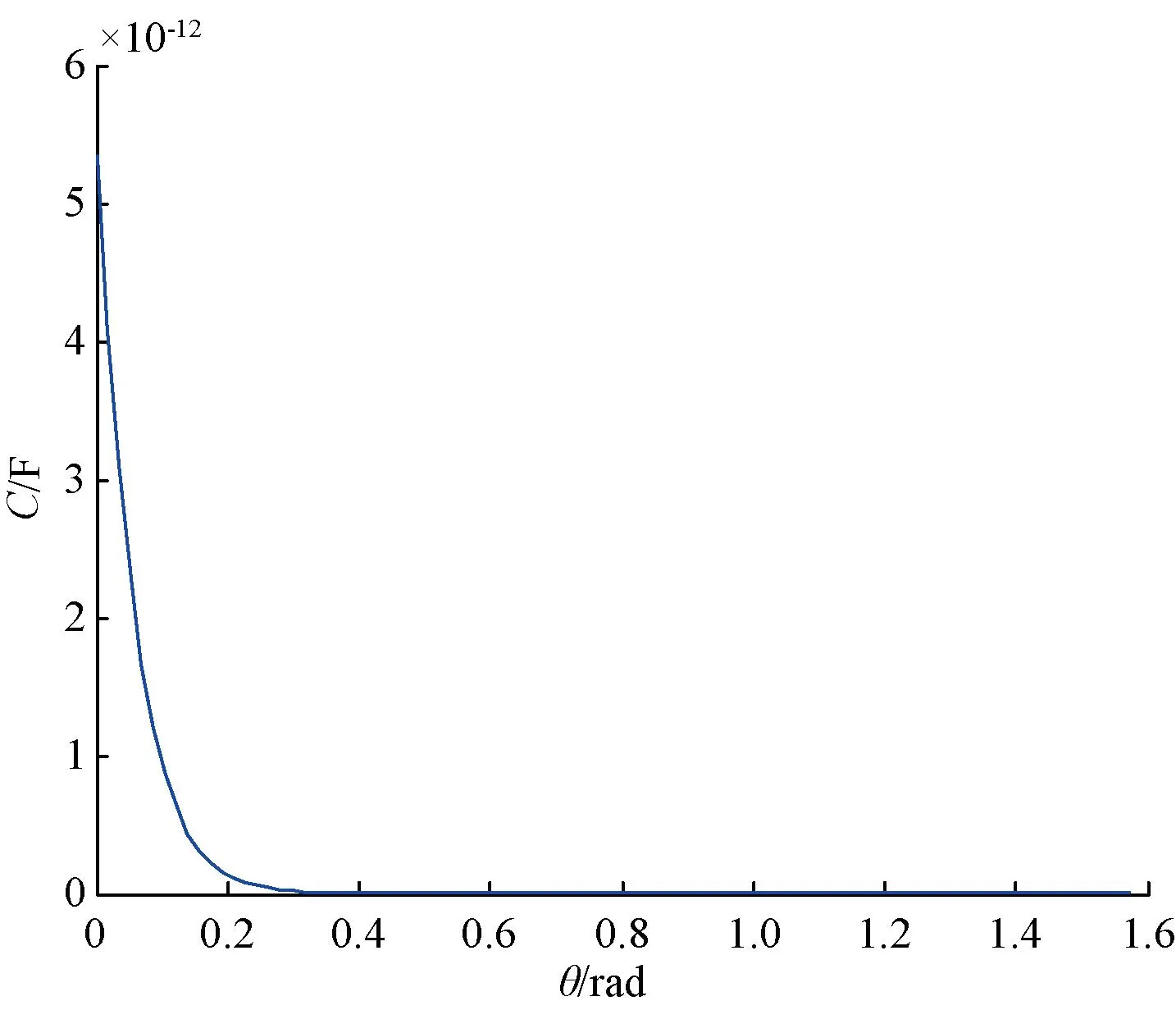
图7 静电电动机定、转子间电容量在0~π/2间的变化
4 定子、转子几何参数对电动机力矩的影响
下面讨论单极静电电动机定子和转子的几何尺寸对Cmax和Cmin数值的影响,从而找到优化单极静电电动机力矩输出特性的途径。
4.1 (Cmax-Cmin)与θ1和θ2的关系
在静电电动机转子和定子半径一定的情况下,MATLAB[7]软件的数值模拟结果表明:当θ1<θ2时,随着θ1值的增加,静电电动机的(Cmax-Cmin)增大,静电力矩增大,如图8所示;当θ1=θ2时,θ1(θ2)的取值不影响(Cmax-Cmin)的大小,静电力矩不变,如图9所示;当θ1>θ2时,在θ1保持不变时,随着θ2的增加,电动机的(Cmax-Cmin)减小,静电力矩减小,如图10所示。
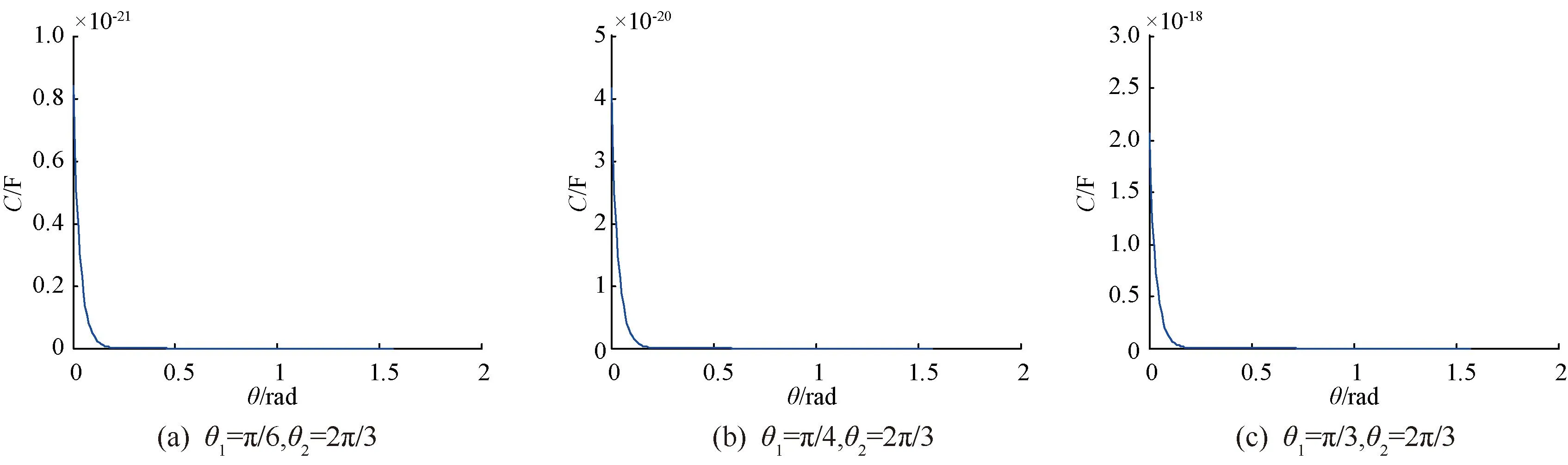
图8 (Cmax-Cmin)与θ1和θ2的关系(θ1<θ2)(R1=0.045 m,R2=0.050 m,L=0.3 m)
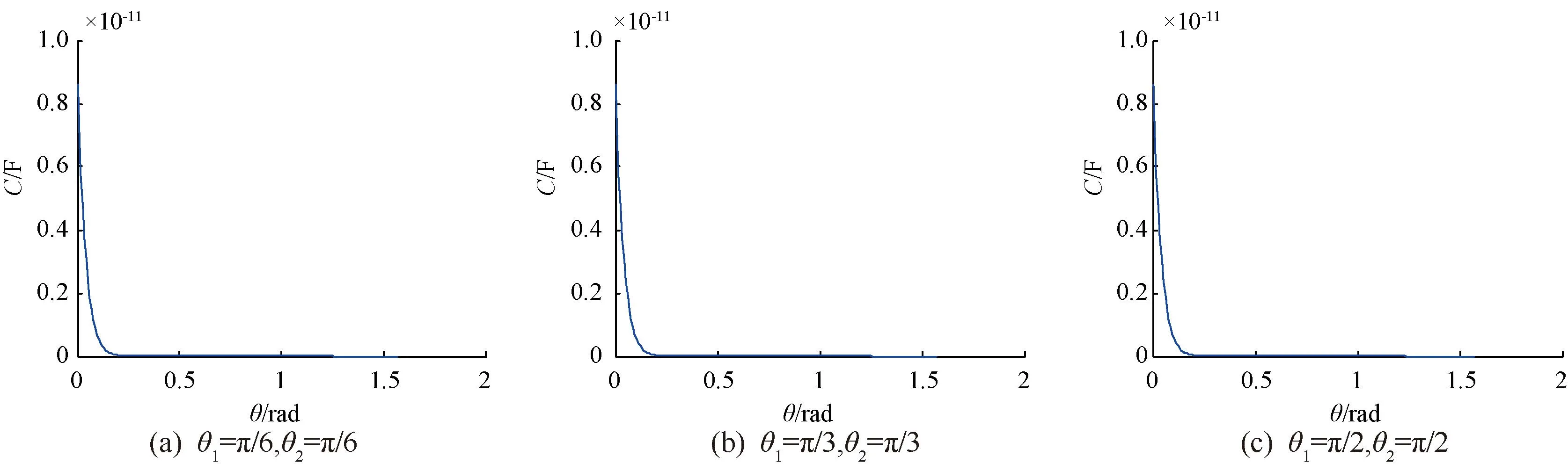
图9 (Cmax-Cmin)与θ1和θ2的关系(θ1=θ2)(R1=0.045 m,R2=0.050 m,L=0.3 m)

图10 (Cmax-Cmin)与θ1和θ2的关系(θ1>θ2)(R1=0.045 m,R2=0.050 m,L=0.3 m)
4.2 (Cmax-Cmin)与R2/R1的关系
在静电电动机转子和定子所对的圆心角一定的情况下,MATLAB的数值模拟结果表明,随着R2/R1(R1、R2均小于1)数值的增加,静电电动机的(Cmax-Cmin)增大,静电力矩增大,如图11所示。
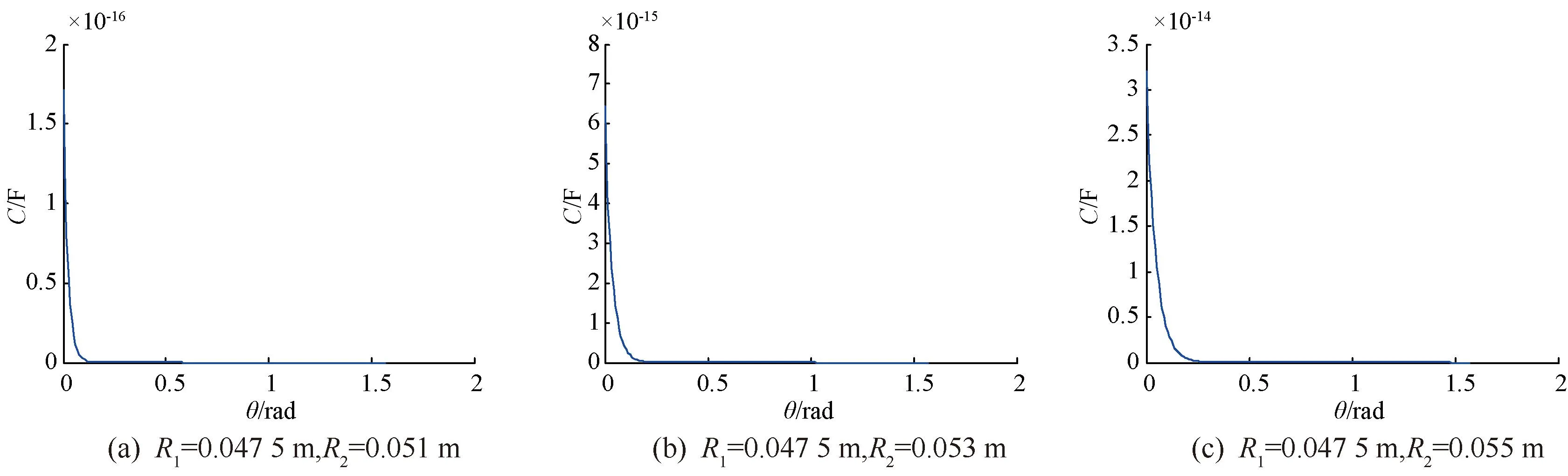
图11 (Cmax-Cmin)与R2/R1的关系(θ1=π/2,θ2=2π/3,L=0.3 m)
4.3 (Cmax-Cmin)与R1的关系
在θ1、θ2及h=ln(R2/R1)一定的情况下,MATLAB的数值模拟结果表明,随着R1(R1的取值小于1)数值的增加,静电电动机的(Cmax-Cmin)减小,静电力矩减小,如图12所示。
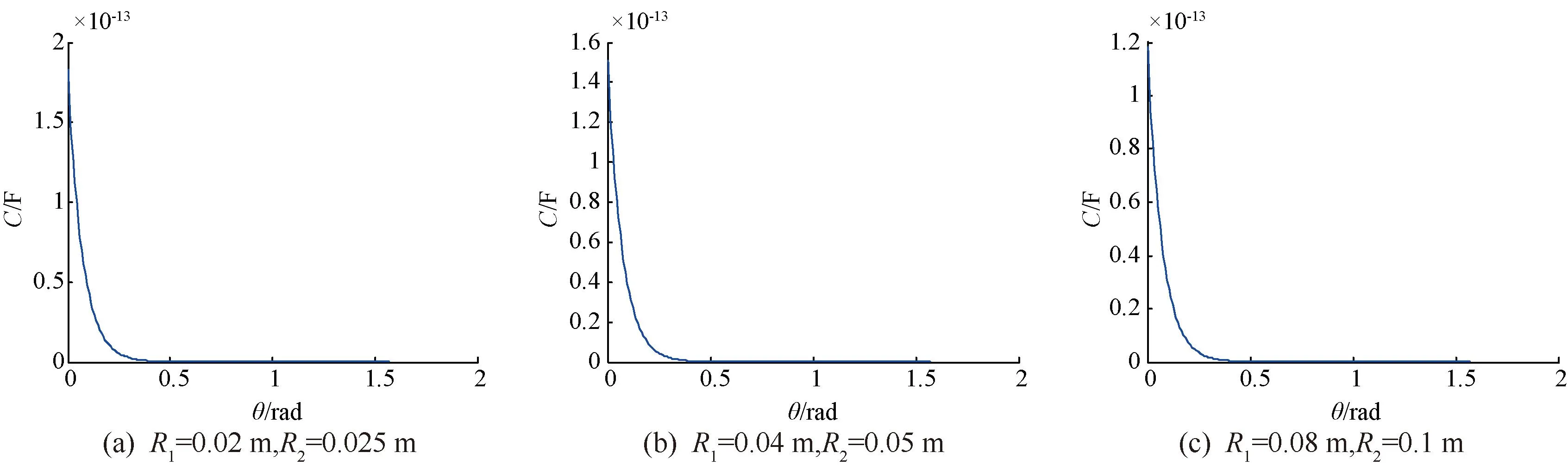
图12 (Cmax-Cmin)与R1的关系(θ1=π/2,θ2=2π/3,h=ln(1.25),L=0.3 m)
4.4 (Cmax-Cmin)与电动机有效轴向长度L的关系
4.5 优化单极静电电动机力矩输出特性的途径
综合上述的数值模拟结果可以看出,改善单极静电电动机力矩输出特性的途径有四个:一是取θ1<θ2,并增大θ1值;二是增大R2/R1值;三是在θ1、θ2及h=ln(R2/R1)一定的情况下,减小R1的数值;四是尽量增大电动机的有效轴向长度。这四个参数适度配合,就可优化电动机的力矩输出特性。
5 结 语
计算机数值模拟的研究方法已成为继实验研究和理论分析之外的第三种研究手段。本文将理论分析与计算机数值模拟相结合,研究了计及转子和定子横向边缘效应的单极静电电动机的电场,给出了精确度较高的单极静电电动机最大和最小电容的差值,明确了优化单极静电电动机力矩输出特性的途径。本文为静电电动机的设计与研究提供了一种新的方法,具有一定的理论意义和实用价值,也可供相关问题的研究参考。
