基于ZigBee网络环境的井下人员定位算法改进
2024-01-26石小红梁珍珍李亚娇史慧玲
石小红,梁珍珍,李亚娇,史慧玲
(1.定西职业技术学院 数字经济学院 信息工程系,甘肃 定西 730500;2.皮山县科克铁热克乡第二中心小学,新疆 和田 845150)
0 引言
目前人员定位主要分为地面与地下,地下人员定位主要是用于工业或者矿业开采。针对煤矿井下人员定位精度不高且效率低下的问题[1],根据井下环境的特殊性以及无线传感网络技术的组网功能改进的一种定位算法。
井下环境比较复杂,尤其是巷道空间狭小,常用的无线网络无法穿透地面,有线网络无法满足当前环境需求[2],所以使用新的无线网络在井下环境是刚需,目前常用的无线网络有蓝牙、WiFi、ZigBee、UWB等。基于各自的优势,选用ZigBee作为无线通信网络[3]。矿井巷道中的人员定位功能可参照目前室内人员定位,但井下环境相较于室内环境复杂,故井下环境的定位比室内步骤复杂,因此要提高定位精度就必须要合理的控制井下环境中的特殊环境因素[4]。通过研究筛选,基于信号强度测距的原理改进算法,提高定位系统的定位精度。首先获取当前环境参数进而计算目标节点的位置坐标,然后与文献中改进的定位算法进行对比,以证明此次改进算法精度的高低。
1 矿井巷道环境影响分析
1.1 矿井巷道环境的特殊性
RSSI测距是以信号强度为基础进行测距,通过两点间距离可计算出位置坐标[5]。这种方式主要应用于有限空间中的定位,从目前定位方法的发展来看室内定位算法已趋于完善,误差也越来越小[6]。但室内的高精度定位不能直接应用于矿井环境中,矿井定位不仅要考虑成本,还要考虑信号的衰减对精度的影响[7]。要想提高定位精度,必须先找出影响定位精度的因素[8]。
1.2 矿井环境的影响
矿井环境是影响定位精度最大的因素。矿井环境的不确定性会导致信号传输时大幅度的衰减,信号衰减后传输的距离就变近,接收到的信号强度会很弱,这就导致定位精度会变差。要提高定位精度,获取当前环境实际参数是最为重要的[9]。
1.3 干扰信号波
干扰信号主要是在当前环境下运行的一些设备产生的干扰信号波,这种干扰信号波也会导致信号的衰弱,误差会很大[10-11]。因此在接收到信号波的同时进行处理才能保证定位精度[12]。
2 改进算法模型的建立
根据环境因素以及信号干扰引起的衰减创建定位算法模型,改进定位算法的模型如图1所示。
改进的定位算法模型的目的是确保定位精度。首先要准确获取当前的环境参数,从当前环境中测得信号强度值,然后通过测距方式计算出节点坐标。只有在当前环境中获取到信号强度值时,才能保证计算出的距离值以及节点坐标更符合实际位置坐标[13]。在该模型中需要获取每个节点发送的信号强度值,只有获得每个节点发送的信号强度值时,才能根据信号强度值计算出两节点之间的距离,通过距离计算出节点坐标。测距定位的基本原理是在矿井环境中布置的4个参考节点通过收发工作人员身上佩戴的移动节点的信号强度,由上述理论计算出每个节点的坐标后,以每个坐标为圆心,以节点距离为半径画圆,如果所得4个圆刚好相交[14-15],则焦点即为目标节点的位置坐标,见式(1)。
(1)
由于干扰及环境的影响,定位过程中所有节点不可能出现最理想的状态,每个定位节点出现的位置都会存在一定的偏差[16-17]。出现这种偏差是因为有不确定因素的影响,导致所勾勒出的圆不会相交,但是会出现以下几种情况,如图2所示。

图1 算法模型节点布置Fig.1 Node layout of algorithm model

图2 定位过程中可能出现的4种情况Fig.2 Four kinds of scenarios during process of positioning
定位系统在实测过程中,算法应用会根据实际情况判断使用何种算法,判断过程是利用圆的相交情况判断是否有解,若在判断相交[18-19]的过程中出现了图2中a这种最理想的状态或者与理想状态接近,则只需要根据式(1)可求得移动节点的位置坐标[20]。若判断的结果是b、c、d的任意情况则只需要根据改进的加权质心定位算法[21-23]进行计算,即
(2)
根据式(2)可求得矿井中移动人员的位置坐标。首先会获取每个模块的信号强度值,根据信号强度值的大小计算出接受信号模块与发送信号模块之间的距离,然后根据节点之间的距离计算出位置坐标,具体算法流程如图3所示。
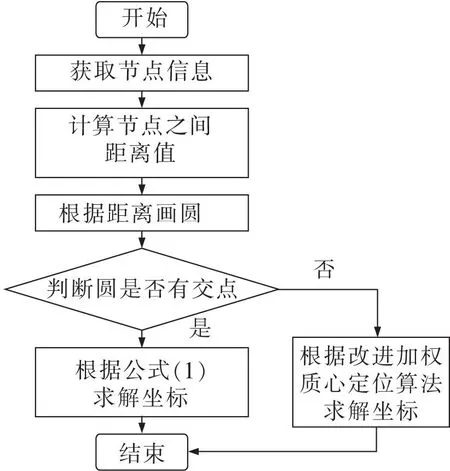
图3 算法计算流程示意Fig.3 Flowchart of algorithm calculation
3 试验用到的硬件
在实际测试改进定位算法时会用到测试环境以及相关的硬件设施。矿井环境选择实训室走廊模拟矿井巷道。实训楼走廊约30 m×1.78 m×3 m(长×宽×高)。走廊两侧都是机房实训室,走廊顶部是通风管道以及线路的布设,环境的复杂程度可以比拟矿井的复杂程度,环境模拟如图4所示。
定位过程中使用的硬件模块是ZigBee开发套件。该套件共有5个模块,其中包括4个定位节点,一个移动节点,且每个模块都可以通过自动组网搭建起小环境的网络数据平台,可以收发来自不同组件的相关的数据包,根据接收到的数据信息进行定位测算。

图4 现场测试环境Fig.4 On-site test environment
4 实测结果分析
实测结果要通过数据分析才能得出误差,所以使用改进定位算法的定位系统后得到的位置坐标在验证其误差结果时用到一个对比文献,本次测试参考文献[8]改进的定位算法,通过对比分析得出误差结果,根据接收到的信号强度值计算位置坐标。假设e为误差参数,待测节点的实际位置坐标为X(x,y),通过运用算法后所得待测节点的位置坐标为X(x0,y0),则有误差公式为
(3)
首先将本次定位系统得到位置坐标与实际位置坐标对比,对比结果如图5所示。
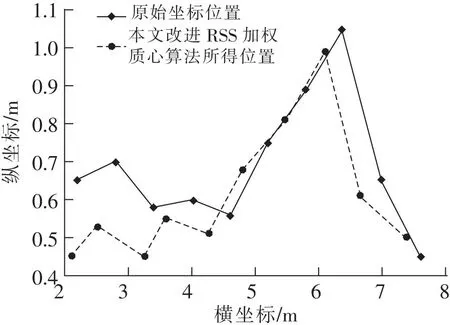
图5 改进算法与实际位置坐标仿真对比Fig.5 Simulation comparison of improved algorithm and actual position coordinate
从仿真结果可以看出,运用本文改进的定位算法后所得目标节点的位置坐标与实际位置坐标极为吻合,所以此次改进的定位算法在精度上是比较符合实际且具有一定的应用价值。由于本文改进定位算法参考了文献[8]中作者所改进的定位算法,因此将文献[8]改进定位算法所得位置坐标的误差与此次改进定位算法的误差进行对比,其结果如图6所示。
可以看出,本文改进定位算法应用到定位系统时的定位误差相比于文献[8]改进定位算法应用到系统时误差要小很多,从结果反映出本文改进定位算法是优于对比文献改进定位算法的。现将传统定位算法与文献[8]改进定位算法以及本文改进定位算法与实际位置坐标进行对比,对比结果如图7所示。

图6 不同定位算法误差对比结果Fig.6 Error comparison results of different positioning algorithms

图7 应用3种算法时所得位置坐标与原始坐标对比Fig.7 Comparison of obtained position coordinate using three algorithms and the originate coordinate
从图7可以发现本文改进定位算法误差最小,因此该改进定位算法是具有一定创新性且具有相对优势。现通过相对误差进行对比分析,结果如图8所示。
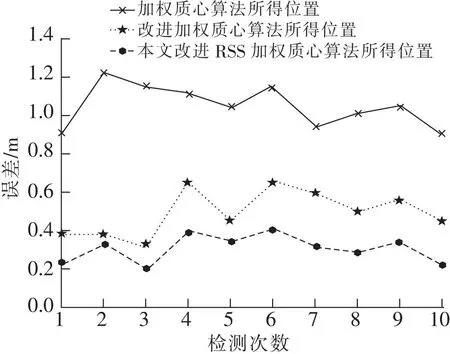
图8 各算法误差仿真示意Fig.8 Error simulation of different algorithms
在实际的煤矿井下环境中,自然环境可能会更恶劣、更复杂,因为井下各种电器设备以及矿井界面断层的不规整性都是影响信号传输的实质性因素,尤其是在无线信号传输的过程中,井下环境中电器设备产生的白噪声以及断层的不规整性都会使信号衰减,这样就会造成定位精度不高,误差增加。因此在定位时要充分考虑这些因素带来的误差,所以在此次定位算法的验证中刻意加入了高斯白噪声,以检验此次定位算法的精确度。加入不同噪声对误差的影响如图9所示。

图9 加入不同噪声时对误差的影响Fig.9 Effect of adding different noises on errors
可以看出,随机向井下环境中添加高斯白噪声时会对定位算法精度产生不同程度的影响,但是影响程度因改进算法的优良程度而出现不同的差别。由仿真结果可以得出,此次环境噪声对本文改进定位算法的影响最小,这是因为在此算法改进时加入了滤波处理算法,会降低噪声的影响,而其应用他算法时出现的误差则较大。因此可以得出本文改进的定位算法是比较成功的,也更符合定位的需求,并且成本也相比于其他算法低,是一种比较实用的定位算法。
5 结语
基于信号强度测距的原理,对RSSI测距的加权质心定位算法进行改进,并且对改进后的定位算法通过仿真及实际验证。实际应用算法到定位系统后,将所得位置坐标与原始位置坐标进行对比分析得出算法的误差,通过对比分析得出本文改进定位算法具有一定的应用价值,且定位误差相比于其他2种定位算法误差要小。因此,改进的定位算法相对比较成功,可以进行实际监测应用,具有一定的实用价值。
