双管武器弹丸同时着靶坐标测量方法研究
2024-01-23王腾飞王宏浩谢宏伟
单 聪,王腾飞,王宏浩,谢宏伟
(1.陆装驻西安地区第八军代室,西安 710000;2.徐工消防安全装备有限公司工程制造部,江苏 徐州 221000;3.西安应用光学研究所机载光电研发部,西安 710065)
在身管武器性能的测试试验中,弹丸的着靶坐标测试是检验性能的重要测量指标之一[1]。弹丸着靶坐标的测试方法有很多,早期通过在预定弹道上布放带有坐标的纸靶板,射击后由人工测量弹丸的着靶坐标;20 世纪下半叶由澳大利亚的Lindsay C.Knight 与英国的Robert B.Phillips 等对四声传感器阵列的声靶进行论述[2],当弹丸速度超过音速且穿过靶面后,弹头形成的弹头激波将会与2 个金属杆相碰撞,通过计算撞点位置得到弹丸弹头撞击靶面时的着靶坐标;光电探测阵列立靶的测量原理是通过采集穿过幕面时弹丸所遮挡的光电器件编号并依据系统坐标测量公式进行计算[3],最终得到弹丸的着靶坐标;双线阵CCD 交汇测量法是目前经常使用的弹丸着靶坐标测量方法[4-7],双线阵CCD 交汇测量法是将2 台线阵CCD 相机的有效探测视场进行部分重合,飞行弹丸穿过幕面时由相机采集图像上传到上位机软件进行处理,最终可以得到高精度的弹丸着靶坐标。以上几种方法各有优势,但当测量多弹丸过幕的着靶坐标时,以上方法均存在不同问题导致无法测量。
2.1.5 加样回收试验。由表3可知,绿原酸、葫芦巴碱、D-(-)-奎宁酸、咖啡酸的回收率分别为97.12%、97.46%、95.25%、93.28 %,RSD值分别为1.77%、0.80%、2.23%、2.42%。表明该方法准确、可靠,可用于咖啡中绿原酸、葫芦巴碱、D-(-)-奎宁酸、咖啡酸的含量测定。
单管武器进行射击时,弹丸速度较高并且每发弹丸的飞行加速度可能有些许差异,可能存在2 发弹丸齐头并进的问题,三弹丸及多弹丸同时着靶的概率远小于双弹丸同时着靶的概率,因此,本研究仅关注双弹丸同时着靶的坐标测量问题[8]。本文以双弹丸同时着靶为基础,论述三线阵CCD 测量系统的测量原理,并建立系统数学测量模型,针对该模型的着靶坐标公式进行误差仿真和分析。
1 三线阵CCD 相机双弹丸着靶坐标测量原理
三线阵CCD 测量系统主要是基于3 台线阵CCD 相机采集弹丸着靶时刻的弹丸阴影图像,2 台线阵CCD 相机负责弹丸着靶坐标的计算,1 台线阵CCD 相机用来排除虚假弹丸图像,虚假弹丸的排除如图1 所示。假设左右2 台相机分别为1 号、2 号相机,中间相机为3 号相机。当两发弹丸同时到达靶面,1、2 号相机分别会采集到2 个弹丸阴影图像,计算弹丸的着靶坐标需要对弹丸阴影图像进行处理,此时1、2 号相机中均有2 个弹丸阴影对应的像元位置,每个像元位置与对应相机的镜头主点相连会形成4 条直线,直线的交点即为弹丸的着靶点。由于直线两两相交会形产生4 个交点如图1 中M1、M2、N1、N2点所示,该4 个交点中不仅存在2 个真实弹丸的着靶坐标点同时还包含2 个虚假弹丸点,其中令M1、M2为真实弹丸的着靶坐标点,N1、N2为虚假弹丸图像点。3 号相机所采集图像中同样有2 个弹丸的阴影图像,将弹丸阴影对应的像元编号与3 号相机的镜头主点连为直线,通过三角函数计算出2 条直线与y轴的夹角即θ1、θ2与M1、M2的位置关系进行比对,最终可以排除N1、N22 个虚假弹丸点并确定M1、M2的真实弹丸位置坐标。
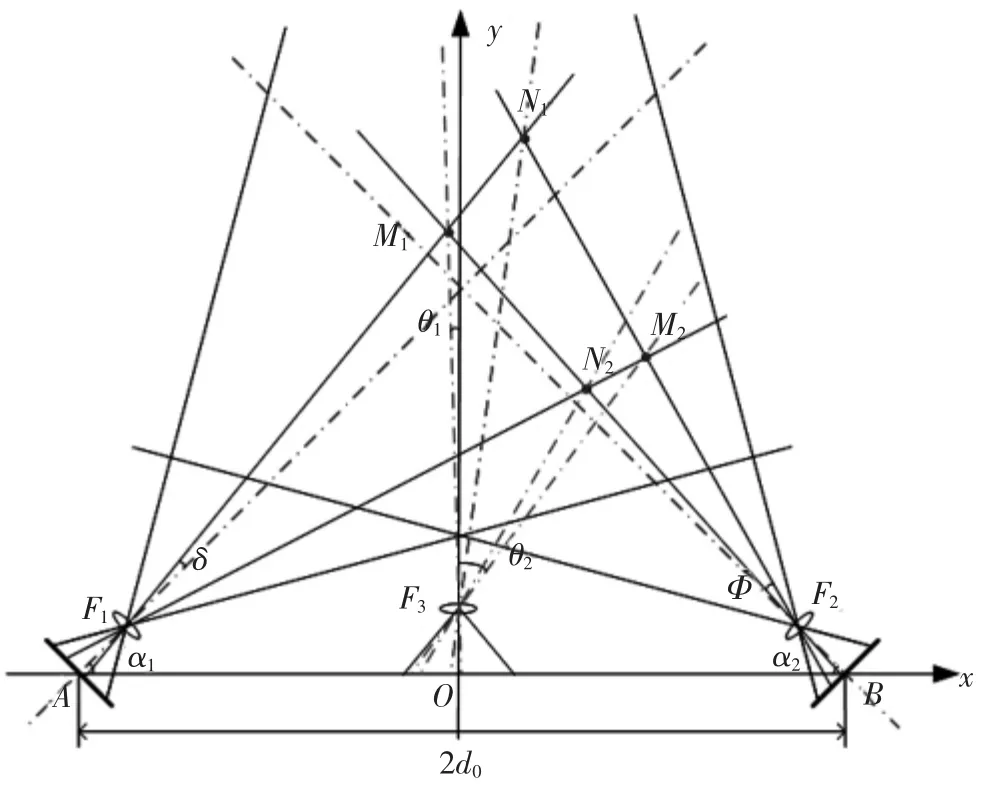
图1 排除虚假弹丸图像示意图
2 三线阵CCD 测量系统数学模型的建立
三线阵CCD 测量系统是将3 台线阵CCD 相机放置在同一平面且在一条直线上,使得3 台线阵CCD 相机的光幕面重合形成有效公共幕面,3 线阵CCD 测量系统如图2 所示。相机通过探测器件采集图像上传至上位机软件进行图像处理,计算弹丸阴影在处理后图像中对应的像元位置编号,最终计算弹丸穿过幕面时的着靶坐标。

图2 三线阵CCD 测量系统示意图
通过上文可知,该三线阵CCD 交汇测试系统的弹丸着靶坐标计算公式如式(5)、式(6)所示,d0为左右2台CCD 之间的间距,δ 为弹丸阴影点与1 号相机对应像元连线和1 号相机光轴的夹角,Φ 为弹丸阴影点与3 号相机对应像元连线和3 号相机光轴的夹角,β1是弹丸阴影点与1 号相机对应像元连线和x轴夹角,β3是弹丸阴影点与3 号相机对应像元连线和x轴夹角。f为3 台CCD 相机的焦距。

图3 弹丸着靶坐标计算示意图
通过以上的分析与推导,可以确定图3 中Q点的坐标公式,结果如式(10)和式(11)所示
为了得到Q点的x坐标,需计算出BD与DQ,Q点的x坐标主要计算过程如下
与改革开放同行的天脊集团,在发展进程中不忘初心、牢记使命,坚持“精致生产、市场深耕、流动风控”工作主线,坚定品质自信,打造第一品牌,在煤化工领域成为引领。
由于α1与α2是光轴与x轴的夹角已知,因此δ、Φ的表达式分别为
以往要上好美术欣赏课,需要搜集大量的图片,搜集有关的幻灯片,录像带,需要大量的口头讲解。不少教师把上好欣赏课视为畏途,学生对乏味的欣赏课持不欢迎的态度。现在,教师可以采用微课的方式,在图片中配以文字或旁白,以故事的形态播放给学生看,美术欣赏课的效果则大为改观。
若想计算出弹丸穿过由1、2 号相机所构成公共光幕的着靶坐标,首先需要计算出CD,因此要得到β1与β2,β1、β2的公式如式(1)、式(2)所示
Q点的坐标计算公式与第二发弹丸的着靶坐标计算公式原理大致相同,计算出2 发弹丸的着靶坐标后可以通过3 号相机所采集到2 发弹丸的阴影图像进行处理,依据三角函数关系得到2 发弹丸与y轴的夹角,并以此为依据来排除2 个虚假弹丸点,从而实现了双弹丸同时着靶的坐标测量问题。
3 误差仿真与分析
三线阵CCD 测量系统主要针对双弹丸同时着靶的坐标计算问题,该系统中采用计算单发弹丸的着靶坐标方式来分别计算2 发弹丸的着靶坐标。当弹丸穿过1 号CCD 相机与2 号CCD 相机所组成的共同幕面后示意图如图3 所示。以3 号CCD 相机的中心像元位置为坐标系原点,以光轴向上方向为y轴,以发光点向左所在直线为x轴,弹丸着靶点为Q,3 号CCD 相机的中心像元处为O点,1 号CCD 相机的中心像元处为A点,弹丸阴影对应像元位置为C点,2 号CCD 相机的中心像元位置处为B点,弹丸阴影对应像元位置为D点,弹丸着靶坐标处Q点与C点所连直线和1 号CCD 相机的光轴夹角为δ,Q点与D点所连直线和2 号CCD 相机的光轴夹角为Φ,1、2 号相机的光轴与x轴的夹角分别位α1、α2,Q点与C 点连线和x轴所呈夹角为β1,Q与D点连线和x轴所呈夹角为β2,1 号与2 号相机的间距为d0,A、C两点间距离为h1,B、D两点间距离为h2。
以误差传递理论为基础,推导出弹丸的横纵坐标测量误差△X与△Y可以表示为
图4 和图5 分别为系统x坐标测量误差△X和系统y坐标测量误差△Y随着x和y坐标值的改变而变化的分布图,在本次仿真中假定d0=2 000 mm,f=14 mm,△d0=2 mm,△f=0.014 mm,△δ、△Φ、△β1、△β3均为0.1°。x坐标从-1.5~+1.5 m 变化,y坐标从0.5~2 m 变化,δ、Φ、β1、β3均随着着靶点坐标x和y的变化而变化。当x绝对值小于1.5 m 时,y值大于0.5 m 小于2 m 时,x坐标测量误差△X小于1.5 mm;y坐标误差不受x坐标值变化的影响,其误差随着y坐标值的增大而增大,当y值大于0.5 m小于2 m时,y坐标测量误差△Y小于2.0 mm。
去片UCVA≤0.8组验配前具有较高的球镜度(P<0.001)、柱镜度(P<0.001)、较长的可视虹膜直径(P<0.001)和眼轴(P<0.001),2组间年龄、眼压、角膜曲率等参数差异无统计学意义。2组儿童的眼部基本特征数据见表1。
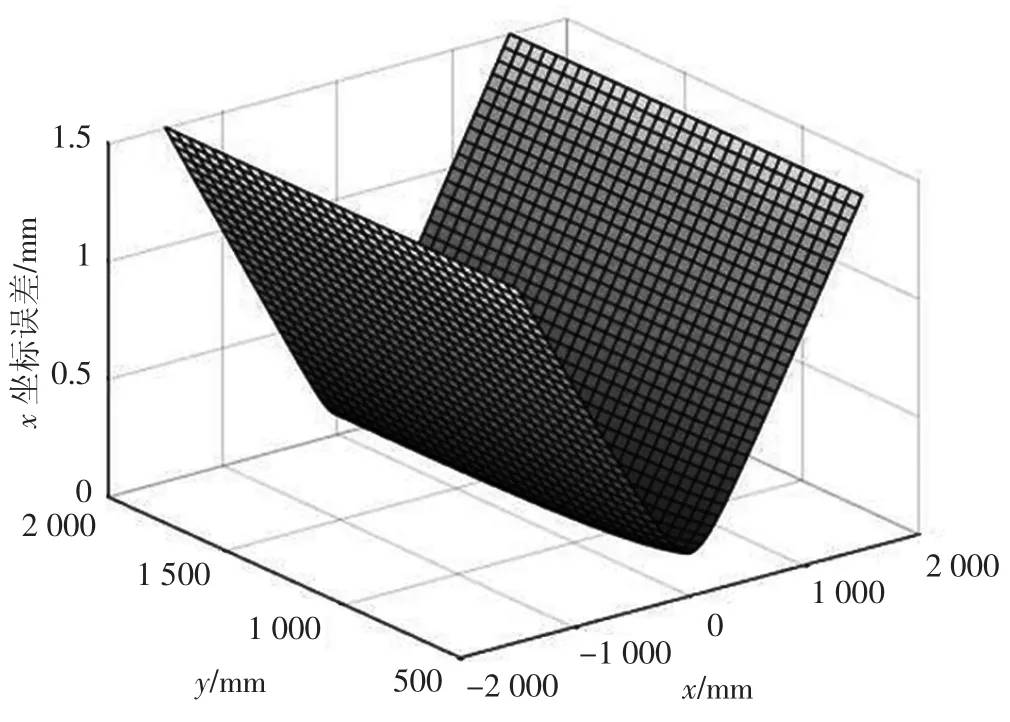
图4 系统X 坐标测量误差分布图

图5 系统Y 坐标测量误差分布图
4 结束语
本课题优化了一种基于三线阵CCD 测量系统的双弹丸同时着靶坐标测量方法,通过3 台线阵CCD相机形成的公共光幕实现对弹丸着靶坐标的计算,以及对双弹丸同时触发时产生的虚假弹丸图像进行剔除。建立了该测量系统的数学模型,使用左右2 台线阵CCD 相机采集弹丸过幕图像并进行坐标参数计算,根据中间相机的像元位置及直线相交原理实现对真实弹丸着靶坐标的角度计算,排除虚假弹丸点。对着靶坐标公式进行误差仿真与分析可以得到:在测量靶面为2 m×2 m 时,x方向上的测量误差范围为0.14~1.5 mm,y方向上的测量误差范围为0.51~2.0 mm,x和y方向上的误差均在允许误差范围内,满足身管武器系统的测试要求,该系统具有结构简单、测量误差小、易于实现工程化等优点。
